You might also like
- Jacqurad Towel Rapier LoomDocument4 pagesJacqurad Towel Rapier LoomNohaSeddikAbd-ElSalamNo ratings yet
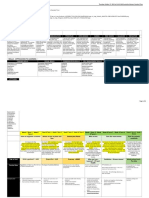
- Learning Outcomes: Section A: Self Assessment (To Be Completed by The Student)Document20 pagesLearning Outcomes: Section A: Self Assessment (To Be Completed by The Student)NohaSeddikAbd-ElSalamNo ratings yet
- Hsq15epilepsy tcm77-141758 PDFDocument8 pagesHsq15epilepsy tcm77-141758 PDFNohaSeddikAbd-ElSalamNo ratings yet
- Advanced Encryption StandardDocument21 pagesAdvanced Encryption StandardNohaSeddikAbd-ElSalamNo ratings yet
- System VueDocument19 pagesSystem VueNohaSeddikAbd-ElSalamNo ratings yet
- 04-Informed Search 4up 19.05.04 PDFDocument11 pages04-Informed Search 4up 19.05.04 PDFNohaSeddikAbd-ElSalamNo ratings yet
- Data Flow DiagramDocument8 pagesData Flow DiagramNohaSeddikAbd-ElSalamNo ratings yet
- AI BFS DFS Greedy Local SearchDocument30 pagesAI BFS DFS Greedy Local SearchNohaSeddikAbd-ElSalamNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Wind farm project NPV and LCOE analysisDocument5 pagesWind farm project NPV and LCOE analysisPedro Galvani72% (32)
- 2019 Planning OverviewDocument7 pages2019 Planning Overviewapi-323922022No ratings yet
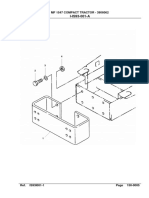
- MF1547Front Linkage - Seat PDFDocument18 pagesMF1547Front Linkage - Seat PDFAhmad Ali NursahidinNo ratings yet
- 1302 FF6SF6DosingMachine 0Document3 pages1302 FF6SF6DosingMachine 0Fawzi ChakirNo ratings yet
- Value Chain Engineering Assignemnt IIDocument22 pagesValue Chain Engineering Assignemnt IImaria50% (2)
- Iphone 6 Full schematic+IC BoardDocument86 pagesIphone 6 Full schematic+IC BoardSIDNEY TABOADANo ratings yet
- Boeco Mantas de CalentamientoDocument2 pagesBoeco Mantas de CalentamientoJhon VallejoNo ratings yet
- Electronically Controlled On-Demand 4WDDocument32 pagesElectronically Controlled On-Demand 4WDjulio797No ratings yet
- Fast, Fast VP : FAST: Features, Drawbacks, Applications and Some QuestionsDocument13 pagesFast, Fast VP : FAST: Features, Drawbacks, Applications and Some QuestionsSraVanKuMarThadakamallaNo ratings yet
- UGC MarketingDocument16 pagesUGC MarketingJK MarketingNo ratings yet
- Fix 3Document12 pagesFix 3Eng TrNo ratings yet
- CE 308 Lec 7 Mixing, Handling and Placing of ConcreteDocument29 pagesCE 308 Lec 7 Mixing, Handling and Placing of ConcretewasimkhaliqNo ratings yet
- Be 2K OEM's Manual: Bernini Design SRL - ItalyDocument48 pagesBe 2K OEM's Manual: Bernini Design SRL - ItalySergio Ricardo IbañezNo ratings yet
- Fie's Newton LawDocument26 pagesFie's Newton LawNida'ul KhasanahNo ratings yet
- Synopsis Mobile Banking AdministrationDocument24 pagesSynopsis Mobile Banking AdministrationRaj BangaloreNo ratings yet
- 515 TSG PorosityDocument60 pages515 TSG Porosityripecue100% (3)
- Add Item N N°Document268 pagesAdd Item N N°Bilel MahjoubNo ratings yet
- Mikom Remote Unit Software ManualDocument35 pagesMikom Remote Unit Software ManualealforaNo ratings yet
- Fire Fighting System Case StudyDocument8 pagesFire Fighting System Case StudyBhakti WanaveNo ratings yet
- Urban Transit Systems and Technology Vuchic PDFDocument614 pagesUrban Transit Systems and Technology Vuchic PDFARAVIND PATIL100% (1)
- MIMSDocument2 pagesMIMSDivyaDevadasAnvekarNo ratings yet
- Environmental Management Plan - MatrixDocument6 pagesEnvironmental Management Plan - Matrixplokhande47100% (1)
- Atmos GIGA N 32-160Document1 pageAtmos GIGA N 32-160Efril dilen franciscoNo ratings yet
- CBSE Class 11 Chemistry States of Matter RevisionDocument3 pagesCBSE Class 11 Chemistry States of Matter RevisionTEJASVI MALVINo ratings yet
- AT-8600 Series Switch: Hardware ReferenceDocument30 pagesAT-8600 Series Switch: Hardware ReferenceSubbuNo ratings yet
- Class PDF 516 QuestionDocument80 pagesClass PDF 516 QuestionRahul KashyapNo ratings yet
- Orace Rac TafDocument4 pagesOrace Rac TafNst TnagarNo ratings yet
- SAIC-A-2009 Rev 2Document5 pagesSAIC-A-2009 Rev 2ரமேஷ் பாலக்காடுNo ratings yet
- Reliability and Failure Modes of A Hybrid Ceramic Abutment PrototypeDocument5 pagesReliability and Failure Modes of A Hybrid Ceramic Abutment PrototypeAli FaridiNo ratings yet
- BASH Shell Scripting SyllabusDocument4 pagesBASH Shell Scripting SyllabusAdzmely Mansor100% (1)