You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 737 NG Vertical Situation Display VSDDocument17 pages737 NG Vertical Situation Display VSDpontoo100% (7)
- Uh60 Afcs PDFDocument21 pagesUh60 Afcs PDFNikolai Pautov100% (3)
- X-Plane FMS ManualDocument38 pagesX-Plane FMS ManualTitvs Flavivs VespasianvsNo ratings yet
- Target MiniDocument1 pageTarget MiniShaik Mohammed HaikhalNo ratings yet
- Encyclopedia of Russian and Slavic Myth and LegendDocument392 pagesEncyclopedia of Russian and Slavic Myth and LegendAndra Aionitoae100% (3)
- 1546 PDFDocument426 pages1546 PDFNikolai PautovNo ratings yet
- Owner's Manual: DRM Digital Receiver DR111Document26 pagesOwner's Manual: DRM Digital Receiver DR111Nikolai PautovNo ratings yet
- Long Island Air Traffic Control Tower New York TRACON - Islip Area Standard Operating ProceduresDocument34 pagesLong Island Air Traffic Control Tower New York TRACON - Islip Area Standard Operating ProceduresNikolai PautovNo ratings yet
- 1546 PDFDocument426 pages1546 PDFNikolai PautovNo ratings yet
- Required Navigation Performance Authorization Required RNP ArDocument50 pagesRequired Navigation Performance Authorization Required RNP ArNikolai PautovNo ratings yet
- Navigation: GeneralDocument22 pagesNavigation: GeneralNikolai PautovNo ratings yet
- Simplified Concorde X Checklist by Flightsim LabsDocument15 pagesSimplified Concorde X Checklist by Flightsim LabsNikolai PautovNo ratings yet
- Appendix C-MITRE Technical ReportDocument281 pagesAppendix C-MITRE Technical ReportNikolai PautovNo ratings yet
- Flypast Feature MarinellDocument9 pagesFlypast Feature MarinellNikolai Pautov100% (1)
- Parallel 42 p42 Chaseplane User Guide 7dcaf5Document70 pagesParallel 42 p42 Chaseplane User Guide 7dcaf5Nikolai PautovNo ratings yet
- Robinson R22 Flight ManualDocument79 pagesRobinson R22 Flight ManualNikolai PautovNo ratings yet
- Chinese Tetrad p01Document95 pagesChinese Tetrad p01Nikolai PautovNo ratings yet
- Robinson R22 POHDocument196 pagesRobinson R22 POHrav100% (1)
- Test CentersDocument23 pagesTest CentersNikolai PautovNo ratings yet
- Datong AD170 Active Aerial ReviewDocument3 pagesDatong AD170 Active Aerial ReviewNikolai PautovNo ratings yet
- Landing The Q 400Document27 pagesLanding The Q 400dismalmusicNo ratings yet
- Smart Access 1105Document12 pagesSmart Access 1105Gerson Freire De Amorim FilhoNo ratings yet
- WATCHDocument9 pagesWATCHGANTORONo ratings yet
- Advantages & Disadvantages CITWDocument5 pagesAdvantages & Disadvantages CITWSreePrakashNo ratings yet
- Physics Lab ReportDocument2 pagesPhysics Lab ReportFelix SonsunNo ratings yet
- Cotta Transfer Case Lube PlanDocument3 pagesCotta Transfer Case Lube PlanMatias Alfredo Contreras KöbrichNo ratings yet
- MI MetadataDocument310 pagesMI MetadataMatthew McCreadyNo ratings yet
- How To Install GmtsarDocument24 pagesHow To Install GmtsardedetmixNo ratings yet
- FH400 73158464 Pca-6.140Document431 pagesFH400 73158464 Pca-6.140IgorGorduz100% (1)
- Seminar ReportDocument30 pagesSeminar Reportshashank_gowda_7No ratings yet
- Piping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator TrainingDocument12 pagesPiping Vibration: Causes, Limits & Remedies: Public Courses In-House Courses Operator Trainingmember1000100% (1)
- JU P-Tool Engineering DataDocument1 pageJU P-Tool Engineering Dataazze bouzNo ratings yet
- 2 Interference in Spur GearsDocument2 pages2 Interference in Spur Gearschris100% (1)
- End All Red Overdrive: Controls and FeaturesDocument6 pagesEnd All Red Overdrive: Controls and FeaturesBepe uptp5aNo ratings yet
- How Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?Document6 pagesHow Do We Classify An Antipumping Relay?: What Will Happen If Antipumping Relay Circuit Is Not Present?joseNo ratings yet
- Unit-I: Introduction To J2EEDocument29 pagesUnit-I: Introduction To J2EEsurakshaNo ratings yet
- Application of PLC and SCADA in Auto-Control Systems For Silo Grain HandlingDocument4 pagesApplication of PLC and SCADA in Auto-Control Systems For Silo Grain Handlingshahid_scribdNo ratings yet
- 2022 Manufacture AnswerDocument8 pages2022 Manufacture AnswerChampika V SamarasighaNo ratings yet
- Excellent Hex Key Wrench: English VersionDocument54 pagesExcellent Hex Key Wrench: English Versionmg pyaeNo ratings yet
- XHLE Long Coupled Centrifugal Pump EnglishDocument8 pagesXHLE Long Coupled Centrifugal Pump Englishgagi1994brahimNo ratings yet
- Partlist Smsport 110RDocument74 pagesPartlist Smsport 110RThai YunNo ratings yet
- How rock layers are formedDocument3 pagesHow rock layers are formedAlemar AllecerNo ratings yet
- Valvula Selectora Trans.Document4 pagesValvula Selectora Trans.enriqueNo ratings yet
- AASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageDocument11 pagesAASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageErnesto Oscar VidelaNo ratings yet
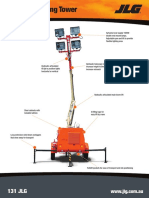
- JLG Lighting Tower 6308AN Series II 20150907Document2 pagesJLG Lighting Tower 6308AN Series II 20150907DwiSulistyo09No ratings yet
- AMS Thread Size ChartDocument4 pagesAMS Thread Size Chartarunvelu_1250% (2)
- Communication System (LC-ECE204G) LAB ManualDocument54 pagesCommunication System (LC-ECE204G) LAB ManualBindia HandaNo ratings yet
- Roebuck 1942Document12 pagesRoebuck 1942Imam Saja DechNo ratings yet
- DMD Documentation Error - Freetronics ForumDocument3 pagesDMD Documentation Error - Freetronics ForumapofviewNo ratings yet
- QADocument170 pagesQASudama KhatriNo ratings yet
- Oksd Icwh 1993 RoisumDocument40 pagesOksd Icwh 1993 RoisumKamalam CloudsoftNo ratings yet