You might also like
- ECUACIONES DIFERENCIALES InformeDocument56 pagesECUACIONES DIFERENCIALES InformeFrancisco Díaz GonzálesNo ratings yet
- Glosario de Ecuaciones DiferencialesDocument21 pagesGlosario de Ecuaciones DiferencialesAntonio Lanceta AragonésNo ratings yet
- Unidad 2 Ecuaciones DiferencialesDocument12 pagesUnidad 2 Ecuaciones DiferencialesmarielybustosNo ratings yet
- Ecuaciones Diferenciales Ordinarias InformeDocument11 pagesEcuaciones Diferenciales Ordinarias InformeronaldoNo ratings yet
- Vivienda U. Presupuesto PDFDocument217 pagesVivienda U. Presupuesto PDFsilverio100% (1)
- Trabajo Dirigido 1Document11 pagesTrabajo Dirigido 1silverio100% (1)
- Ensayos Destructivos MaderaDocument12 pagesEnsayos Destructivos MaderasilverioNo ratings yet
- Ecuaciones Diferenciales Ordinarias PDFDocument17 pagesEcuaciones Diferenciales Ordinarias PDFcarolinaNo ratings yet
- Ecuaciones diferenciales ordinarias (EDOsDocument35 pagesEcuaciones diferenciales ordinarias (EDOsEduardoNo ratings yet
- Aplicación Ecuaciones Diferenciales Ordinarias de Primer OrdenDocument8 pagesAplicación Ecuaciones Diferenciales Ordinarias de Primer Ordengrecia mendezNo ratings yet
- Unidad 1. Las Ecuaciones Diferenciales y Sus SolucionesDocument10 pagesUnidad 1. Las Ecuaciones Diferenciales y Sus SolucionesGil Sandro Gómez67% (3)
- Capitulo - 5Document34 pagesCapitulo - 5María Bonilla RodríguezNo ratings yet
- Ecuaciones diferenciales ordinarias de primer orden de variables separablesDocument58 pagesEcuaciones diferenciales ordinarias de primer orden de variables separablesMariaNo ratings yet
- Cap Itulo 1 Ecuaciones Diferenciales de Primer OrdenDocument19 pagesCap Itulo 1 Ecuaciones Diferenciales de Primer OrdenRenzo HuaytaNo ratings yet
- Ecuaciones DiferencialesDocument4 pagesEcuaciones DiferencialestottyNo ratings yet
- EcuacionesDiferencialesDocument31 pagesEcuacionesDiferencialesortsantacreuNo ratings yet
- Edo UiDocument53 pagesEdo UigladysileanaNo ratings yet
- CAP4ADocument29 pagesCAP4AAVRNo ratings yet
- Teorema de Existencia y UnicidadDocument9 pagesTeorema de Existencia y UnicidadcurtisJacksonperezNo ratings yet
- 8 E. Diferenciales - Editado - REVISADO - Con Nuevos MetodosDocument16 pages8 E. Diferenciales - Editado - REVISADO - Con Nuevos MetodosekaitzibanezriveraNo ratings yet
- Ecuaciones Diferenciales LinealesDocument36 pagesEcuaciones Diferenciales LinealesSergio Torrano DíazNo ratings yet
- 8) Ecuaciones DiferencialesDocument15 pages8) Ecuaciones DiferencialesJana Vecchio RomeroNo ratings yet
- Inv. Ecuaciones Diferenciales Ordinarias de Primer OrdenDocument16 pagesInv. Ecuaciones Diferenciales Ordinarias de Primer OrdenJesus Alberto Perez RinconNo ratings yet
- Ecuaciones diferenciales de primer ordenDocument16 pagesEcuaciones diferenciales de primer ordenChrisyova RosendNo ratings yet
- EDO 24 - 25 de MarzoDocument22 pagesEDO 24 - 25 de MarzoVicente Garrido LiberonaNo ratings yet
- EcuacionesDiferencialesDocument16 pagesEcuacionesDiferencialesPaul MarquezNo ratings yet
- Factor IntegranteDocument10 pagesFactor IntegranteKaren CastilloNo ratings yet
- Aplicacion de Leyes de Kirchhoff A Ecuaciones DiferenialesDocument11 pagesAplicacion de Leyes de Kirchhoff A Ecuaciones Diferenialesduvanp920% (1)
- Repaso Ecuaciones DiferencialesDocument27 pagesRepaso Ecuaciones DiferencialesjavierchipiNo ratings yet
- Informe de Ecuaciones DiferencialesDocument7 pagesInforme de Ecuaciones DiferencialesLuis SubiagaNo ratings yet
- Ecuaciones Diferenciales Ordinarias InformeDocument11 pagesEcuaciones Diferenciales Ordinarias InformeMaycol GutierrezNo ratings yet
- EcuacionesdiferencialesDocument71 pagesEcuacionesdiferencialesRojas JoseNo ratings yet
- Unidad 3. Ecuaciones Diferenciales Lineales de Orden SuperiorDocument27 pagesUnidad 3. Ecuaciones Diferenciales Lineales de Orden SuperiorGil Sandro Gómez100% (1)
- Unidad 1Document80 pagesUnidad 1EMMANUEL MALDONADO ALVARADONo ratings yet
- Ecuaciones DiferencialesDocument14 pagesEcuaciones DiferencialesAMYNNXXXX0% (1)
- Ecuaciones Diferenciales de Primer OrdenDocument58 pagesEcuaciones Diferenciales de Primer OrdenLuis ValverdeNo ratings yet
- Ecuaciones diferenciales de orden superiorDocument79 pagesEcuaciones diferenciales de orden superiorYandel Perez PastranaNo ratings yet
- Guia Pucp de Ecuaciones DiferencialesDocument26 pagesGuia Pucp de Ecuaciones DiferencialesMarco AntonioNo ratings yet
- Ecuaciones DiferencialesDocument38 pagesEcuaciones DiferencialesDiego VilaNo ratings yet
- 3 Ecuaciones Diferenciales Orden SuperiorDocument79 pages3 Ecuaciones Diferenciales Orden SuperiorAntoniParionaAstoNo ratings yet
- Ecuaciones Diferenciales de Segundo OrdenDocument28 pagesEcuaciones Diferenciales de Segundo OrdenLuis Mendoza VásquezNo ratings yet
- Ec - Dif.de Orden Sup.Document6 pagesEc - Dif.de Orden Sup.Rafael Alvarez CastroNo ratings yet
- WROSKIANODocument24 pagesWROSKIANONebur SaucedoNo ratings yet
- Ecuaciones Diferenciales OrdinariasDocument17 pagesEcuaciones Diferenciales Ordinariasjuanrivas2020No ratings yet
- Análisis de Ecuaciones Diferenciales de Bernoulli con MatlabDocument15 pagesAnálisis de Ecuaciones Diferenciales de Bernoulli con MatlabElio Huaman Chipana0% (1)
- Leccion 01Document19 pagesLeccion 01Álvaro Martínez SánchezNo ratings yet
- Libro Ecuaciones Diferenciales PH ValenzuelaDocument128 pagesLibro Ecuaciones Diferenciales PH ValenzuelaHoracio Alexis Sanhueza100% (1)
- Ejer Cici OsDocument15 pagesEjer Cici OsFels SdgkjNo ratings yet
- EcuacionesDiferencialesPrimerOrdenDocument65 pagesEcuacionesDiferencialesPrimerOrdenJorge Alberto Guzman GutierrezNo ratings yet
- Tema 1.2. Soluciones de Las ED (Actualizado)Document12 pagesTema 1.2. Soluciones de Las ED (Actualizado)Alejandro Hernandez LopezNo ratings yet
- Unidad 5Document16 pagesUnidad 5dleal314051No ratings yet
- Ecuaciones DiferencialesDocument64 pagesEcuaciones Diferencialesballenato7No ratings yet
- Unidad 4Document16 pagesUnidad 4senia kristelNo ratings yet
- Tema 17Document40 pagesTema 17Kevin 117No ratings yet
- Formas CanonicasDocument40 pagesFormas CanonicasJaor JnrNo ratings yet
- Unidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFDocument26 pagesUnidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFKevin OvandoNo ratings yet
- Ecuaciones DiferencialesDocument8 pagesEcuaciones DiferencialesUnlockd HumaNo ratings yet
- Apuntes 2Document10 pagesApuntes 2David GálvezNo ratings yet
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesFrom EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesNo ratings yet
- Ejercicios de Ecuaciones Diferenciales OrdinariasFrom EverandEjercicios de Ecuaciones Diferenciales OrdinariasRating: 4 out of 5 stars4/5 (1)
- Informe Mensual Febrero 2018Document3 pagesInforme Mensual Febrero 2018silverioNo ratings yet
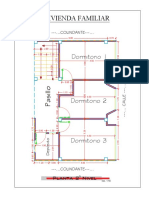
- 2º NivelDocument1 page2º NivelsilverioNo ratings yet
- Índice de AnexosDocument3 pagesÍndice de AnexossilverioNo ratings yet
- Escalas AutocadDocument5 pagesEscalas AutocadDeago06No ratings yet
- SPTDocument2 pagesSPTsilverioNo ratings yet
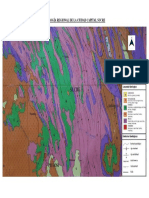
- Geologia RegionalDocument1 pageGeologia RegionalsilverioNo ratings yet
- Modifi CA DoDocument3 pagesModifi CA DosilverioNo ratings yet
- Análisis Crítico Del Derecho Natural y El Positivo-1Document1 pageAnálisis Crítico Del Derecho Natural y El Positivo-1silverio100% (1)
- Ficha Ambiental Pasarela PeatonalDocument25 pagesFicha Ambiental Pasarela PeatonalsilverioNo ratings yet
- CronogramaConstrucciónTanqueDocument6 pagesCronogramaConstrucciónTanquesilverioNo ratings yet
- Detalles Pav - Rumi RumiDocument1 pageDetalles Pav - Rumi RumisilverioNo ratings yet
- Análisis Crítico Del Derecho Natural y El Positivo-1Document1 pageAnálisis Crítico Del Derecho Natural y El Positivo-1silverio100% (1)
- Propuesta Ampliada Proyecto NuevoDocument12 pagesPropuesta Ampliada Proyecto NuevosilverioNo ratings yet
- Informe Mensual Marzo 2018Document3 pagesInforme Mensual Marzo 2018silverioNo ratings yet
- Solicitud de AdmisionDocument3 pagesSolicitud de AdmisionsilverioNo ratings yet
- Rumi Rumi DetallesDocument1 pageRumi Rumi Detallessilverio100% (1)
- Propuesta Ampliada YoDocument12 pagesPropuesta Ampliada YosilverioNo ratings yet
- Informe Mensual Febrero 2018Document3 pagesInforme Mensual Febrero 2018silverioNo ratings yet
- O C Rumi Rumi Items ModificadosDocument9 pagesO C Rumi Rumi Items ModificadossilverioNo ratings yet
- Ensayos Destructivos Madera PDFDocument12 pagesEnsayos Destructivos Madera PDFsilverioNo ratings yet
- Diapositivas PresentacionDocument14 pagesDiapositivas PresentacionsilverioNo ratings yet
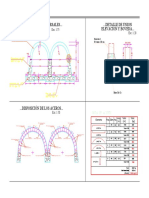
- Embovedado Pata Llinfi-PlanosDocument1 pageEmbovedado Pata Llinfi-PlanossilverioNo ratings yet
- O C Rumi Rumi Items ModificadosDocument9 pagesO C Rumi Rumi Items ModificadossilverioNo ratings yet
- Cholesky Ejemplo de ShedDocument2 pagesCholesky Ejemplo de ShedKlitos Petrukio Mastropiero MelgarNo ratings yet
- Examen de Comprension LinguisticaDocument10 pagesExamen de Comprension LinguisticarealitymNo ratings yet
- Examen de Comprension LinguisticaDocument10 pagesExamen de Comprension LinguisticarealitymNo ratings yet
- Lineas de InfluenciaDocument17 pagesLineas de InfluenciaJinnett Danallys Salazar OblitasNo ratings yet