You might also like
- AI Lecture 6Document13 pagesAI Lecture 6hassan blouchNo ratings yet
- Introduction to Hill Climbing - AI's Mathematical Optimization TechniqueDocument5 pagesIntroduction to Hill Climbing - AI's Mathematical Optimization TechniquetusharNo ratings yet
- Hill Climbing Algorithm ExplainedDocument5 pagesHill Climbing Algorithm ExplainedBraj SubediNo ratings yet
- Hill Climbing MethodsDocument14 pagesHill Climbing Methodsapi-370591280% (5)
- Hill Climbing and Its TypesDocument6 pagesHill Climbing and Its TypesK0140 Jeevanantham.SNo ratings yet
- Hill Climbing Algorithm in Artificial IntelligenceDocument6 pagesHill Climbing Algorithm in Artificial Intelligencemissionps23No ratings yet
- Hill Climbing Algorithm in AIDocument5 pagesHill Climbing Algorithm in AIAfaque AlamNo ratings yet
- SRDocument53 pagesSRMonisha KabramNo ratings yet
- Artificial Intelligence: Dr. Md. Nasim AdnanDocument25 pagesArtificial Intelligence: Dr. Md. Nasim AdnanshohanNo ratings yet
- Unit 2 AIDocument14 pagesUnit 2 AIPriyankaNo ratings yet
- AI Lab Assignmentc7Document5 pagesAI Lab Assignmentc7Sagar PrasadNo ratings yet
- Hill ClimbingDocument2 pagesHill Climbingrajghag0409No ratings yet
- CO2-session 8 & 9: Session No: Session Topic: Local Search AlgorithmsDocument43 pagesCO2-session 8 & 9: Session No: Session Topic: Local Search Algorithmssunny bandelaNo ratings yet
- Inform Search Chapter4 3 6Document8 pagesInform Search Chapter4 3 6vaghelamiralNo ratings yet
- L6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmDocument57 pagesL6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmSaim ChishtiNo ratings yet
- Local SearchDocument33 pagesLocal SearchFaizan AhmedNo ratings yet
- Problem Graphs Matching Hill ClimbingDocument32 pagesProblem Graphs Matching Hill ClimbingRaghu SomuNo ratings yet
- Report On Ai - 041533Document11 pagesReport On Ai - 041533AnkitNo ratings yet
- Artificial Intelligence Assignment on Hill Climbing, Simulated Annealing and Genetic AlgorithmsDocument4 pagesArtificial Intelligence Assignment on Hill Climbing, Simulated Annealing and Genetic Algorithmsabhiy92No ratings yet
- AnwermlDocument10 pagesAnwermlrajeswari reddypatilNo ratings yet
- Ai Module1 QB SolutionsDocument15 pagesAi Module1 QB SolutionsTejas SuriNo ratings yet
- Hill ClimbingDocument1 pageHill ClimbingVikas SharmaNo ratings yet
- Solving 3-SAT Problems with Hill Climbing, Beam Search, VNS & Tabu SearchDocument17 pagesSolving 3-SAT Problems with Hill Climbing, Beam Search, VNS & Tabu SearchMAYURI PAWARNo ratings yet
- Hill ClimbingDocument12 pagesHill ClimbingVishesh YadavNo ratings yet
- AI LAB 3bDocument17 pagesAI LAB 3bMAYURI PAWARNo ratings yet
- CS 188 Introduction To Artificial Intelligence Spring 2019 Note 1Document13 pagesCS 188 Introduction To Artificial Intelligence Spring 2019 Note 1Shrey SamdaniNo ratings yet
- CS 188 Introduction To Artificial Intelligence Summer 2019 Note 1Document13 pagesCS 188 Introduction To Artificial Intelligence Summer 2019 Note 1hellosunshine95No ratings yet
- Simple Hill ClimbingDocument7 pagesSimple Hill Climbingk.gomanth vara saiNo ratings yet
- BlockDocument14 pagesBlockMai VanNo ratings yet
- Minor Project On Heuristic Search: Faculty Guide: StudentDocument19 pagesMinor Project On Heuristic Search: Faculty Guide: StudentAishwarya GuptaNo ratings yet
- CS 188 Introduction to AI: Agents and State SpacesDocument13 pagesCS 188 Introduction to AI: Agents and State Spacesfor_booksNo ratings yet
- Unit 2 Part 1Document30 pagesUnit 2 Part 1abhinav vuppalaNo ratings yet
- Unit 2 Hill Climbing TechniquesDocument23 pagesUnit 2 Hill Climbing Techniquesharshita.sharma.phd23No ratings yet
- Hill ClimbingDocument3 pagesHill ClimbingSlimani AhmedNo ratings yet
- Heuristic SearchDocument49 pagesHeuristic SearchsaikiranNo ratings yet
- Assignment - 05: Shivam Kamlesh Yadav BEIT-B4 77Document6 pagesAssignment - 05: Shivam Kamlesh Yadav BEIT-B4 77Game TwitcherNo ratings yet
- Artifical IntelligenceDocument22 pagesArtifical IntelligenceShubham KumarNo ratings yet
- Searching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorDocument54 pagesSearching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorSanjay JainNo ratings yet
- Monkey and BananaDocument22 pagesMonkey and Bananatrupti.kodinariya981050% (2)
- AI HillClimbing 2.3Document16 pagesAI HillClimbing 2.3Narasimhan KumaraveluNo ratings yet
- SearchingDocument78 pagesSearchingannia khanNo ratings yet
- Local Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )Document44 pagesLocal Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )BalajiNo ratings yet
- Local Search AlgorithmsDocument14 pagesLocal Search AlgorithmsShreyas VaradkarNo ratings yet
- We Will See A Different Form of Heuristic Search AppliedDocument17 pagesWe Will See A Different Form of Heuristic Search AppliedahsanulmNo ratings yet
- Heuristic SearchDocument4 pagesHeuristic SearchSahil JasalNo ratings yet
- Local Search Hill Climbing Genetic AlgoDocument52 pagesLocal Search Hill Climbing Genetic Algofunnyclups413No ratings yet
- 12. Local Search and OptimizationDocument41 pages12. Local Search and OptimizationSupriya NevewaniNo ratings yet
- Problem Solving AIDocument40 pagesProblem Solving AIShoaibNo ratings yet
- 2nd Hill ClimbingDocument4 pages2nd Hill ClimbingMuhammad ZaidNo ratings yet
- 4 Informed Search and ExplorationDocument6 pages4 Informed Search and ExplorationI CETNo ratings yet
- Gradient Descent OptimizationDocument6 pagesGradient Descent OptimizationmomavNo ratings yet
- Unit-2.3 Local Search Algo and Optimization ProblemsDocument18 pagesUnit-2.3 Local Search Algo and Optimization Problemsmani111111No ratings yet
- Hill ClimbingDocument11 pagesHill ClimbingRaghu SomuNo ratings yet
- cs188 sp23 Note02Document8 pagescs188 sp23 Note02sondosNo ratings yet
- Local Search Algorithms: Limitations of Search Tree Limitations of Search TreeDocument27 pagesLocal Search Algorithms: Limitations of Search Tree Limitations of Search TreeKarthickNo ratings yet
- Lecture 3 - Problem-Solving (Search) Agents: Dr. Muhammad Adnan HashmiDocument25 pagesLecture 3 - Problem-Solving (Search) Agents: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- Ai Question Bank 2Document20 pagesAi Question Bank 226- Amal SathyanNo ratings yet
- Artificial Intelligence Mca-401 Index: Unit IiDocument8 pagesArtificial Intelligence Mca-401 Index: Unit IiAdityaKumarNo ratings yet
- AI Lecture 4Document34 pagesAI Lecture 4Arsalan AhmedNo ratings yet
- Oracle Webfolder Technetwork Tutorials OBE FormsDocument47 pagesOracle Webfolder Technetwork Tutorials OBE FormsArsalan AhmedNo ratings yet
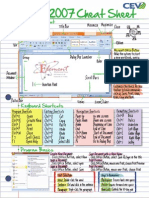
- Word 2007 Cheat SheetDocument4 pagesWord 2007 Cheat SheetArsalan AhmedNo ratings yet
- Google Adsense UrduDocument18 pagesGoogle Adsense UrduArsalan AhmedNo ratings yet
- AI Lecture 14Document26 pagesAI Lecture 14Arsalan AhmedNo ratings yet
- Oracle Forms MaterialDocument88 pagesOracle Forms Materialwritesmd96% (28)
- Manual Setting All PK Mobile NetworksDocument2 pagesManual Setting All PK Mobile NetworksArsalan AhmedNo ratings yet
- AI Lecture 11Document42 pagesAI Lecture 11Arsalan AhmedNo ratings yet
- Course Outline (Artificial Intelligence)Document2 pagesCourse Outline (Artificial Intelligence)Arsalan AhmedNo ratings yet
- Lecture 5 - Informed Search: Dr. Muhammad Adnan HashmiDocument21 pagesLecture 5 - Informed Search: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- AI Lecture 13Document29 pagesAI Lecture 13Arsalan AhmedNo ratings yet
- Lecture 8 - Adversarial Search: Dr. Muhammad Adnan HashmiDocument15 pagesLecture 8 - Adversarial Search: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- AI Lecture 12Document30 pagesAI Lecture 12Arsalan AhmedNo ratings yet
- Lecture 10 - First Order Logic: Dr. Muhammad Adnan HashmiDocument20 pagesLecture 10 - First Order Logic: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- AI Lecture 1Document20 pagesAI Lecture 1Arsalan AhmedNo ratings yet
- Lecture 9 - Knowledge-Based Agents and Logic: Dr. Muhammad Adnan HashmiDocument67 pagesLecture 9 - Knowledge-Based Agents and Logic: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- Lecture 7 - Adversarial Search: Dr. Muhammad Adnan HashmiDocument25 pagesLecture 7 - Adversarial Search: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- Naturalistic ObservationDocument15 pagesNaturalistic ObservationArsalan AhmedNo ratings yet
- Lecture 3 - Problem-Solving (Search) Agents: Dr. Muhammad Adnan HashmiDocument25 pagesLecture 3 - Problem-Solving (Search) Agents: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- Lecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiDocument31 pagesLecture 2 - Rational Agents: Dr. Muhammad Adnan HashmiArsalan AhmedNo ratings yet
- PersonalityDocument43 pagesPersonalityArsalan AhmedNo ratings yet
- Experimental MethodDocument28 pagesExperimental MethodArsalan AhmedNo ratings yet
- Methods of PsychologyDocument24 pagesMethods of PsychologyArsalan Ahmed100% (2)
- SQL JoinsDocument3 pagesSQL JoinsArsalan AhmedNo ratings yet
- Personality VariationsDocument17 pagesPersonality VariationsArsalan AhmedNo ratings yet
- Introduction To Psychology RevisedDocument38 pagesIntroduction To Psychology RevisedArsalan AhmedNo ratings yet
- Using ViewsDocument9 pagesUsing ViewsArsalan AhmedNo ratings yet
- Oracle Single Row FunctionsDocument7 pagesOracle Single Row FunctionsArsalan AhmedNo ratings yet
- 8i Vs 9i Oracle JoinsDocument3 pages8i Vs 9i Oracle JoinsArsalan Ahmed100% (1)
- GEOMETRICAL OPTICS: MIRRORS AND REFLECTIONDocument32 pagesGEOMETRICAL OPTICS: MIRRORS AND REFLECTIONMN AkhtarNo ratings yet
- 16 - 1998 M. J. Moelter J. Evans and G. Elliot Am. J. Phys. 66 668 PDFDocument11 pages16 - 1998 M. J. Moelter J. Evans and G. Elliot Am. J. Phys. 66 668 PDFLau SarmientoNo ratings yet
- Clustering in Machine LearningDocument26 pagesClustering in Machine LearningPeter MachadoNo ratings yet
- Lingo 11 Users ManualDocument714 pagesLingo 11 Users ManualMathi3u100% (3)
- CBSE Test Paper 01 Chapter 13 Surface Areas and VolumesDocument11 pagesCBSE Test Paper 01 Chapter 13 Surface Areas and Volumesrai venugopalNo ratings yet
- Module 11 ElasticityDocument101 pagesModule 11 ElasticityAngel OñaNo ratings yet
- Percolation GrimmettDocument25 pagesPercolation GrimmettIsabella Alvarenga100% (1)
- Physics Paper 3 Marking Scheme Graph AnalysisDocument4 pagesPhysics Paper 3 Marking Scheme Graph AnalysisBenjamin mwanikiNo ratings yet
- The Outcome of A Hypothesis Test Is Reject H ' or 'Do Not Reject H 'Document6 pagesThe Outcome of A Hypothesis Test Is Reject H ' or 'Do Not Reject H 'midoriNo ratings yet
- Automata TheoryDocument19 pagesAutomata TheoryjayashreeNo ratings yet
- 27.M.E. Applied EleDocument47 pages27.M.E. Applied ElekalaiNo ratings yet
- Learning The Pandas Library Python Tools For Data Munging Analysis and Visual PDFDocument208 pagesLearning The Pandas Library Python Tools For Data Munging Analysis and Visual PDFAlicia Brett100% (11)
- Theory of ProductionDocument25 pagesTheory of Productiontegegn mogessieNo ratings yet
- What is Science? A Definition and Overview of its Main BranchesDocument19 pagesWhat is Science? A Definition and Overview of its Main Branchesjay ann delaNo ratings yet
- DLD LAB Experiment 4 2014Document4 pagesDLD LAB Experiment 4 2014Dinh LâmNo ratings yet
- Introduction To Conic SectionsDocument20 pagesIntroduction To Conic Sectionssir jjNo ratings yet
- 4th Grade Engage NY Module 1Document258 pages4th Grade Engage NY Module 1Laurie WhiteNo ratings yet
- Water Rocket ProjectDocument5 pagesWater Rocket Projectjwinfield12No ratings yet
- Getting To Know Arc ObjectsDocument440 pagesGetting To Know Arc ObjectsHadi IlanlooNo ratings yet
- CM Exercise 6Document2 pagesCM Exercise 6AhmedNo ratings yet
- 1992 Drainage of Supported Excavations 1992 Geotechnical and Geological EngineeringDocument18 pages1992 Drainage of Supported Excavations 1992 Geotechnical and Geological EngineeringAdrian FrantescuNo ratings yet
- T-Norm (Lam, Mu) Fuzzy SubringDocument8 pagesT-Norm (Lam, Mu) Fuzzy SubringAnitha SivakumarNo ratings yet
- BVH2100es Buses de CampoDocument52 pagesBVH2100es Buses de Campoewis02No ratings yet
- (Lecture Notes in Electrical Engineering 84) Manuel Duarte Ortigueira (Auth.) - Fractional Calculus For Scientists and Engineers-Springer Netherlands (2011) PDFDocument159 pages(Lecture Notes in Electrical Engineering 84) Manuel Duarte Ortigueira (Auth.) - Fractional Calculus For Scientists and Engineers-Springer Netherlands (2011) PDFMARCUS.VARANIS8748100% (2)
- Rajshahi University of Engineering and Technology Restructure ProposalDocument18 pagesRajshahi University of Engineering and Technology Restructure ProposalMd. Zahidul IslamNo ratings yet
- PI ACE 2010 R2 User Guide For Visual Basic 6 enDocument130 pagesPI ACE 2010 R2 User Guide For Visual Basic 6 envervesolarNo ratings yet
- Solutions To HW Exercises - Ch. 14Document3 pagesSolutions To HW Exercises - Ch. 14ShardulNo ratings yet
- Assignment 4Document3 pagesAssignment 4Stephanie StudennyNo ratings yet
- Issac Newton Rough Draft v1Document3 pagesIssac Newton Rough Draft v1api-253599101No ratings yet
- Grade 7 Plan (Sept. 18)Document4 pagesGrade 7 Plan (Sept. 18)Michael SkiesNo ratings yet