You might also like
- m1 Basic Working CommunicationDocument7 pagesm1 Basic Working CommunicationEllyYana0% (1)
- Level 3Document8 pagesLevel 3EllyYanaNo ratings yet
- Module 3 PDFDocument58 pagesModule 3 PDFEllyYanaNo ratings yet
- Daftar Standard Kemahiran Pekerjaan Kebangsaan (SKPK)Document281 pagesDaftar Standard Kemahiran Pekerjaan Kebangsaan (SKPK)Everboleh ChowNo ratings yet
- FMEA Failure Mode and Effects AnalysisDocument3 pagesFMEA Failure Mode and Effects AnalysisEllyYanaNo ratings yet
- 7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyDocument66 pages7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyandresboy123No ratings yet
- PLC Mnemonic KodDocument12 pagesPLC Mnemonic KodEllyYanaNo ratings yet
- Pma2 6Document9 pagesPma2 6EllyYanaNo ratings yet
- Power Supplies Module 01Document12 pagesPower Supplies Module 01nguyenphuonghuyNo ratings yet
- WS Modul 4Document32 pagesWS Modul 4EllyYanaNo ratings yet
- Pelan Mengajar (Amali) : Institut Wawasan, 50 & 50A, Lorong Semarak 1, Taman Semarak, 09000 KULIM, Kedah Darul AmanDocument5 pagesPelan Mengajar (Amali) : Institut Wawasan, 50 & 50A, Lorong Semarak 1, Taman Semarak, 09000 KULIM, Kedah Darul AmanEllyYanaNo ratings yet
- K.P Quality Requirement STANDARDDocument9 pagesK.P Quality Requirement STANDARDEllyYanaNo ratings yet
- 7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyDocument66 pages7 - Parviz D - Entekhabi-AutoCAD Workbook2D-Hartnell College EngineeringTechnologyandresboy123No ratings yet
- Potential Failure Mode and Effect Analysis For Design and DevelopmentDocument3 pagesPotential Failure Mode and Effect Analysis For Design and DevelopmentEllyYanaNo ratings yet
- Noss L4Document6 pagesNoss L4EllyYanaNo ratings yet
- Electronic Product Quality Control AssessmentDocument4 pagesElectronic Product Quality Control AssessmentEllyYanaNo ratings yet
- Training Pathway FBDocument1 pageTraining Pathway FBEllyYanaNo ratings yet
- K Kerja-C01Document5 pagesK Kerja-C01EllyYana100% (1)
- BreakdownDocument2 pagesBreakdownEllyYanaNo ratings yet
- Chap5 OpampDocument41 pagesChap5 OpampEllyYanaNo ratings yet
- Engineering Drawing - CompleteDocument43 pagesEngineering Drawing - CompleteEllyYanaNo ratings yet
- Work Order Request Form: Maintenance DepartmentDocument1 pageWork Order Request Form: Maintenance DepartmentEllyYanaNo ratings yet
- RivetDocument15 pagesRivetEllyYanaNo ratings yet
- Kna PrintDocument2 pagesKna PrintEllyYanaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Seminar Report On FinFETDocument25 pagesSeminar Report On FinFETaajsaj60% (5)
- Gt5a604 PDFDocument19 pagesGt5a604 PDFArnaud BegueNo ratings yet
- Proxy Sensor Connections PDFDocument4 pagesProxy Sensor Connections PDFEr ShivNo ratings yet
- L19Document38 pagesL19ShreyaNo ratings yet
- FT-55AWP DatasheetDocument2 pagesFT-55AWP DatasheetJesus Ariel Urias CastañoNo ratings yet
- DC-DC Simulation Lab 2Document4 pagesDC-DC Simulation Lab 2Hira SaghirNo ratings yet
- BTCSE 301 Analog Circuits & Electronics Semester IIIDocument11 pagesBTCSE 301 Analog Circuits & Electronics Semester IIIshivaniNo ratings yet
- DatasheetDocument3 pagesDatasheetJorge Alberto Castaño OrtegaNo ratings yet
- MOSFET vs BJT vs FET ComparisonDocument6 pagesMOSFET vs BJT vs FET ComparisonJade JoseNo ratings yet
- 2 S 1Document8 pages2 S 1Nelson Naval CabingasNo ratings yet
- V130 33 R34 - Instal Guide - 10 08Document10 pagesV130 33 R34 - Instal Guide - 10 08stgpereiraNo ratings yet
- bc327 328Document2 pagesbc327 328marcelo giussaniNo ratings yet
- Dark Sensor Using LDR Project ReportDocument14 pagesDark Sensor Using LDR Project ReportRaza Akbar100% (2)
- Experiment 1Document2 pagesExperiment 1rahulneveNo ratings yet
- High Voltage Fast-Switching NPN Power Transistor: ApplicationsDocument6 pagesHigh Voltage Fast-Switching NPN Power Transistor: ApplicationsBogdan GrigoreNo ratings yet
- TA8275HQDocument16 pagesTA8275HQMarcio FreitasNo ratings yet
- Fundamentals Digital Logic and Microcomputer DesignDocument1 pageFundamentals Digital Logic and Microcomputer Designty3919883665No ratings yet
- Gateway Ref1Document26 pagesGateway Ref1gufranNo ratings yet
- Repartizare BOM - 2019Document9 pagesRepartizare BOM - 2019Andrei SerbanNo ratings yet
- CA3046Document6 pagesCA3046erdem10139No ratings yet
- SMC Survival GuideDocument24 pagesSMC Survival Guiderolando_wenceslaoNo ratings yet
- O5k500 00 - en Us IfmDocument3 pagesO5k500 00 - en Us IfmNhi LinNo ratings yet
- Introduction to Silvaco ATLAS Simulation ToolDocument13 pagesIntroduction to Silvaco ATLAS Simulation ToolRajesh AgarwalNo ratings yet
- BEEE NotesDocument23 pagesBEEE Notessonali2408100% (6)
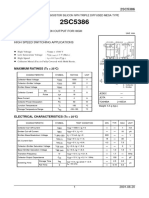
- 2 SC 5386Document5 pages2 SC 5386Miguel MartínezNo ratings yet
- Analog Electronics Assignment SolutionsDocument2 pagesAnalog Electronics Assignment SolutionsHeena FarooqNo ratings yet
- Datasheet PDFDocument2 pagesDatasheet PDFIbrain MoranNo ratings yet
- M.Sc. Prev (Physics) PDFDocument6 pagesM.Sc. Prev (Physics) PDFAmit ShuklaNo ratings yet
- Standard Products GuideDocument72 pagesStandard Products GuideManoel Camargo SampaioNo ratings yet
- Devi Ahilya Vishwavidyalaya, Indore: Scheme For B.E. All Semester Examination Effective From July 2006Document88 pagesDevi Ahilya Vishwavidyalaya, Indore: Scheme For B.E. All Semester Examination Effective From July 2006Rahul SakareyNo ratings yet