You might also like
- AC Motor and Drive Theory Course Sept16Document91 pagesAC Motor and Drive Theory Course Sept16MIGUEL PEÑANo ratings yet
- Calibration Manual (RS13-XX)Document19 pagesCalibration Manual (RS13-XX)Amit Tawte100% (1)
- Hydraulic SymbolsDocument5 pagesHydraulic SymbolsBharathprabhu100% (4)
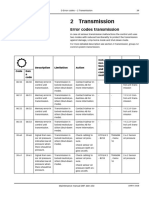
- Codigos Error Crown SC 5245-40Document56 pagesCodigos Error Crown SC 5245-40MIGUEL PEÑA75% (8)
- JLG 1250AJP Operations ManualDocument140 pagesJLG 1250AJP Operations ManualJose Herrera CuevasNo ratings yet
- Electrical Machines: DC Generator and MotorDocument114 pagesElectrical Machines: DC Generator and MotorJanardan ShivashankarNo ratings yet
- No Pipe Modification Necessary: Clamp-On Flow SensorDocument20 pagesNo Pipe Modification Necessary: Clamp-On Flow SensorSaravanan VNo ratings yet
- Basic Hydraulic Systems Components GuideDocument67 pagesBasic Hydraulic Systems Components Guidesba98No ratings yet
- Articulated Power SteeringDocument57 pagesArticulated Power SteeringDeepak Sawant100% (1)
- Pressure-Relief Valves Hydraulics & PneumaticsDocument22 pagesPressure-Relief Valves Hydraulics & PneumaticsAbdelghani ZitouniNo ratings yet
- Installation Instructions - 4.5" Murphy LevelGaugeDocument4 pagesInstallation Instructions - 4.5" Murphy LevelGaugebmdickeyNo ratings yet
- VOLTAGE DROP Testing Overview and Lab SheetDocument6 pagesVOLTAGE DROP Testing Overview and Lab SheetSabastian Edwards100% (1)
- AC DrivesDocument120 pagesAC DrivesVenkata GanesanNo ratings yet
- 3.2 Hydraulic CylinderDocument27 pages3.2 Hydraulic CylinderSiraj Busse100% (1)
- Pressure Switch Operating Principles and DiagnosticsDocument2 pagesPressure Switch Operating Principles and DiagnosticsArtūrs CeimersNo ratings yet
- Motor of Pump HandbookDocument252 pagesMotor of Pump Handbookhithr1No ratings yet
- Study Guide Heavy Duty Equipment Technician: Department of Advanced Education, Skills and LabourDocument29 pagesStudy Guide Heavy Duty Equipment Technician: Department of Advanced Education, Skills and LabourKai FebNo ratings yet
- FLUID POWER SYSTEMS Theory and PracticeDocument37 pagesFLUID POWER SYSTEMS Theory and PracticeAchmad Ari Dwi P100% (2)
- Mastering HW 1Document29 pagesMastering HW 1hieNo ratings yet
- Spreader STS45 BrommaDocument1 pageSpreader STS45 BrommaWilmer Huaman Pasapera88% (8)
- T05 CIH Hydrostatic TransmissionsDocument39 pagesT05 CIH Hydrostatic TransmissionsMohamed BakheetNo ratings yet
- General InformationDocument18 pagesGeneral InformationMIGUEL PEÑANo ratings yet
- General InformationDocument18 pagesGeneral InformationMIGUEL PEÑANo ratings yet
- To Meet Your Challenges: Foldable Knuckle Boom Telescopic Boom Jib Knuckle Boom Heavy Duty Foldable Knuckle BoomDocument24 pagesTo Meet Your Challenges: Foldable Knuckle Boom Telescopic Boom Jib Knuckle Boom Heavy Duty Foldable Knuckle BoompradewoNo ratings yet
- Hydraulic Lift 29.5.13.Document63 pagesHydraulic Lift 29.5.13.Rajat Srivastava50% (2)
- AC Machinery GuideDocument68 pagesAC Machinery GuideBryan Rivera SumagaysayNo ratings yet
- Motion Control Basics PDFDocument8 pagesMotion Control Basics PDFFouad ElhajjiNo ratings yet
- Electromagnetic Clutches and Couplings: International Series of Monographs on Electronics and InstrumentationFrom EverandElectromagnetic Clutches and Couplings: International Series of Monographs on Electronics and InstrumentationRating: 4 out of 5 stars4/5 (1)
- Fault Analysis On LVDocument15 pagesFault Analysis On LVVENKATESAN RNo ratings yet
- Datasheet VT Modular enDocument52 pagesDatasheet VT Modular enTimon2005No ratings yet
- 1) Solid Pad Mount Switchgear - Eng - MexicoDocument16 pages1) Solid Pad Mount Switchgear - Eng - MexicoJims Poma VilcahuamanNo ratings yet
- AC Motor Control PDFDocument4 pagesAC Motor Control PDFkryptNo ratings yet
- RT259-260 Operators Manual enDocument112 pagesRT259-260 Operators Manual enMIGUEL PEÑANo ratings yet
- Manitowoc 4100 WDocument12 pagesManitowoc 4100 WHernan Lazaro HernandezNo ratings yet
- IR1874 Operators Manual enDocument141 pagesIR1874 Operators Manual enMIGUEL PEÑANo ratings yet
- IR1874 Operators Manual enDocument141 pagesIR1874 Operators Manual enMIGUEL PEÑANo ratings yet
- IR1874 Operators Manual enDocument141 pagesIR1874 Operators Manual enMIGUEL PEÑANo ratings yet
- DANA APC200 Control SystemDocument38 pagesDANA APC200 Control SystemMIGUEL PEÑA88% (8)
- RT378 379 Spreader Electrical Schematics BRMY ARF 1849-15-21268 70 - ADocument44 pagesRT378 379 Spreader Electrical Schematics BRMY ARF 1849-15-21268 70 - AMIGUEL PEÑANo ratings yet
- Flipper Arm, TwistlockDocument1 pageFlipper Arm, TwistlockMIGUEL PEÑA100% (1)
- Power Electronics and Electric Drives for Traction ApplicationsFrom EverandPower Electronics and Electric Drives for Traction ApplicationsNo ratings yet
- MAN DieselsDocument24 pagesMAN DieselsHadron Collider100% (1)
- AC500-S Safety User Manual V1.0.1Document387 pagesAC500-S Safety User Manual V1.0.1MIGUEL PEÑANo ratings yet
- Dana TE32000Document15 pagesDana TE32000MIGUEL PEÑA100% (3)
- BR 1700374Document17 pagesBR 1700374MIGUEL PEÑANo ratings yet
- BR1700850a ApprovalDocument30 pagesBR1700850a ApprovalMIGUEL PEÑA100% (1)
- Astm f2412Document17 pagesAstm f2412Nelson Castaño Ciro100% (1)
- Eh5u PDFDocument1 pageEh5u PDFMIGUEL PEÑANo ratings yet
- Adjust eight-wheel trolley wheels with ZPMC documentDocument3 pagesAdjust eight-wheel trolley wheels with ZPMC documenttest testtNo ratings yet
- GuideDocument20 pagesGuideskannan6747No ratings yet
- Telescopic Boom Cranes - Lifetime ExcellenceDocument3 pagesTelescopic Boom Cranes - Lifetime ExcellenceAzwar SalehNo ratings yet
- Measuring Procedure For Wear in Slewing Bearings For Rope Luffing CranesDocument6 pagesMeasuring Procedure For Wear in Slewing Bearings For Rope Luffing CranesKokok LASNo ratings yet
- Troubleshooting Three-Phase AC Motors With U1210 Series Handheld Clamp Meters5990-5192ENDocument6 pagesTroubleshooting Three-Phase AC Motors With U1210 Series Handheld Clamp Meters5990-5192ENecomujNo ratings yet
- HydraulicDocument142 pagesHydraulicAdmir RamicNo ratings yet
- ILQ Installation Manual Checklist & DimensionsDocument34 pagesILQ Installation Manual Checklist & DimensionsZizo Awad0% (1)
- Hydraulic-Training Axial Piston Units Basic PrinciplesDocument19 pagesHydraulic-Training Axial Piston Units Basic PrinciplesRana TalaatNo ratings yet
- Catalogo Contactores HiundayDocument13 pagesCatalogo Contactores Hiundayjosepablohg100% (1)
- 8 Rope Reeving 3 PDFDocument4 pages8 Rope Reeving 3 PDFsanjay aNo ratings yet
- Install and Maintain Synchronized Telescopic CylinderDocument23 pagesInstall and Maintain Synchronized Telescopic CylinderMohamed SemedaNo ratings yet
- Fluid Coupling and Tourque ConverterDocument19 pagesFluid Coupling and Tourque ConverterMD Mahmudul Hasan MasudNo ratings yet
- Magnetek Mondel MBT BrakesDocument36 pagesMagnetek Mondel MBT BrakesNo-No-NoNo ratings yet
- 411-254-0EI Hydraulic EdgeofDock InstallationOwnersManualDocument24 pages411-254-0EI Hydraulic EdgeofDock InstallationOwnersManualUttam Kumar GhoshNo ratings yet
- Charging System 2013 2014 Re1Document643 pagesCharging System 2013 2014 Re1Ivan Leonardo Acevedo Galan100% (1)
- Owner'S Manual For End Carriage: ECN11-2562-A40996A0000-KEDocument10 pagesOwner'S Manual For End Carriage: ECN11-2562-A40996A0000-KEmanafNo ratings yet
- Why Fly Weights Are Driven at A Higher Rotational Speed Than The Engine?Document3 pagesWhy Fly Weights Are Driven at A Higher Rotational Speed Than The Engine?Ashok KumarNo ratings yet
- Pinch Valve Festo VZQA enDocument15 pagesPinch Valve Festo VZQA enBaskaran RathinamNo ratings yet
- 4 Types of DC Motors and Their CharacteristicsDocument5 pages4 Types of DC Motors and Their CharacteristicsNuno HenriquesNo ratings yet
- Hiab Sea Crane Brochure PDFDocument8 pagesHiab Sea Crane Brochure PDFAndree YudiNo ratings yet
- Drop Stop ValveDocument0 pagesDrop Stop ValveBiniyam12No ratings yet
- 1 EN0721 A Vane Troubleshooting GuideDocument65 pages1 EN0721 A Vane Troubleshooting Guidergg_135292No ratings yet
- Industrial rivets according to DIN standardsDocument10 pagesIndustrial rivets according to DIN standards'Verness'NotoBudyoNo ratings yet
- SP18117 Axles EuropeDocument8 pagesSP18117 Axles EuropeTeddy KhantNo ratings yet
- STL - Power SourceDocument42 pagesSTL - Power SourceIky LuturmasNo ratings yet
- Chapter 15Document71 pagesChapter 15Mogaka LucasNo ratings yet
- DC Motor Fundamentals: Back EMF, Types, Applications and CharacteristicsDocument21 pagesDC Motor Fundamentals: Back EMF, Types, Applications and CharacteristicsMeesixNo ratings yet
- DC Motor and GeneratorDocument52 pagesDC Motor and GeneratorDIVY SINGHAL (RA2011003010143)No ratings yet
- EE-260 Lecture 36 Chapter 09Document17 pagesEE-260 Lecture 36 Chapter 09Hamza BashirNo ratings yet
- Homopolar Inverter Design StudyDocument6 pagesHomopolar Inverter Design StudyAlex LNo ratings yet
- Motor5. AC Motors and GeneratorsDocument193 pagesMotor5. AC Motors and GeneratorssooksukonNo ratings yet
- Eletrical Machines-Iii Lecture Notes Unit-IDocument19 pagesEletrical Machines-Iii Lecture Notes Unit-IDIVYA PRASOONA CNo ratings yet
- EE 7 DC Machines Lecture SlidesDocument80 pagesEE 7 DC Machines Lecture SlidesYestin LusterioNo ratings yet
- Difference Between Motor and GeneratorDocument11 pagesDifference Between Motor and GeneratorMohamad Nasrul Hadi Bin Mohd AyopNo ratings yet
- IR1874Document55 pagesIR1874MIGUEL PEÑANo ratings yet
- RT259 260 ConsoleDocument17 pagesRT259 260 ConsoleMIGUEL PEÑANo ratings yet
- Quotation: Terminales Portuarios Euroandinos Paita S.A. Calle Ferrocarril N. 127Document4 pagesQuotation: Terminales Portuarios Euroandinos Paita S.A. Calle Ferrocarril N. 127MIGUEL PEÑANo ratings yet
- Hyd. Plan Luffing TrainningDocument4 pagesHyd. Plan Luffing TrainningMIGUEL PEÑANo ratings yet
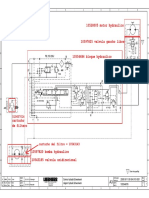
- Schematic HydraulicDocument4 pagesSchematic HydraulicMIGUEL PEÑANo ratings yet
- Plano Hydr Gancho - 04Document1 pagePlano Hydr Gancho - 04MIGUEL PEÑANo ratings yet
- General MaintenanceDocument8 pagesGeneral MaintenanceMIGUEL PEÑANo ratings yet
- Mct10 and LCPDocument35 pagesMct10 and LCPMIGUEL PEÑA100% (1)
- Drive Connections DanfossDocument26 pagesDrive Connections DanfossMIGUEL PEÑANo ratings yet
- Drive Connections DanfossDocument26 pagesDrive Connections DanfossMIGUEL PEÑANo ratings yet
- Training MTRL Sales Companies 031009 - DRF450Document96 pagesTraining MTRL Sales Companies 031009 - DRF450MIGUEL PEÑA100% (1)
- STB10NK60Z, STP10NK60Z STW10NK60ZDocument19 pagesSTB10NK60Z, STP10NK60Z STW10NK60ZАлексей ЧумаковNo ratings yet
- Tutorial 1: A Review of AC Circuit Analysis and Frequency Response AnalysisDocument5 pagesTutorial 1: A Review of AC Circuit Analysis and Frequency Response AnalysisSahil WalkeNo ratings yet
- MC34063 DWSDocument9 pagesMC34063 DWSTayyeb AliNo ratings yet
- EMT10 NewDocument12 pagesEMT10 NewzcaptNo ratings yet
- SIMSEN Leaflet 14 Detailed PDFDocument34 pagesSIMSEN Leaflet 14 Detailed PDFSuresh CNo ratings yet
- Sinusoidal Pulse Width ModulationDocument8 pagesSinusoidal Pulse Width Modulationabdurrahim_t100% (1)
- Physics: DPP - Daily Practice ProblemsDocument3 pagesPhysics: DPP - Daily Practice Problemslalithasaranya018No ratings yet
- Application Fields of High-Temperature SuperconductorsDocument14 pagesApplication Fields of High-Temperature SuperconductorsMohamed Kather BatchaNo ratings yet
- Textbook Errors Chpts 1 8 PDFDocument4 pagesTextbook Errors Chpts 1 8 PDFMárcio Marques MartinsNo ratings yet
- Cost dataFY 2018-19Document88 pagesCost dataFY 2018-19Vivek TiwariNo ratings yet
- HVT Substation Equipment - Product List PDFDocument2 pagesHVT Substation Equipment - Product List PDFAmol DeshmukhNo ratings yet
- Eca 1Document47 pagesEca 1Ahmed SohailNo ratings yet
- Field Installation and IP 16-13-1 Testing of Electrical EquipmentDocument8 pagesField Installation and IP 16-13-1 Testing of Electrical EquipmentOrlando E Cabrera RojasNo ratings yet
- Design and Construction Modifications of PDFDocument161 pagesDesign and Construction Modifications of PDFrandomNo ratings yet
- Mathematics Form 1 Exam PaperDocument26 pagesMathematics Form 1 Exam Paper洛星No ratings yet
- Experiment#6 DC Circuit Analysis: Electrical Circuits Lab 0905212Document13 pagesExperiment#6 DC Circuit Analysis: Electrical Circuits Lab 0905212aliyahNo ratings yet
- 4 Gaseous StateDocument83 pages4 Gaseous StateMr. cool ChaturvediNo ratings yet
- Resistors, Dynamic Breaking YaskawaDocument14 pagesResistors, Dynamic Breaking YaskawaCarlitos BaezNo ratings yet
- Candy Cmd106 16sDocument23 pagesCandy Cmd106 16sBranko SavicNo ratings yet
- CAPE® Physics Past Papers Unit 1Document11 pagesCAPE® Physics Past Papers Unit 1AlexNo ratings yet
- Composition of Substances and SolutionsDocument20 pagesComposition of Substances and SolutionsBante yamiral WondimeNo ratings yet
- Homework 2Document2 pagesHomework 2Yi-Chun LingNo ratings yet
- Lnk302/304-306 Linkswitch-Tn Family: Lowest Component Count, Energy-Efficient Off-Line Switcher IcDocument19 pagesLnk302/304-306 Linkswitch-Tn Family: Lowest Component Count, Energy-Efficient Off-Line Switcher IcFrancisReis100% (1)
- Tneb Finaleb2Document120 pagesTneb Finaleb2ajeez86100% (1)
- OnsemiDocument15 pagesOnsemijeos20132013No ratings yet
- 10 1 1 633 6375Document262 pages10 1 1 633 6375Roberto GRNo ratings yet