You might also like
- Diagrama de IshikawaDocument3 pagesDiagrama de IshikawaJohann L ValerioNo ratings yet
- Extintores No Permitidos y AlmacenamientoDocument3 pagesExtintores No Permitidos y Almacenamientolionelmc09No ratings yet
- Curso Básico SCI CuestionarioDocument6 pagesCurso Básico SCI Cuestionariolionelmc09No ratings yet
- Excel de PlantasDocument3 pagesExcel de Plantaslionelmc09No ratings yet
- BIBLIOGRAFIADocument1 pageBIBLIOGRAFIAlionelmc09No ratings yet
- SectorDocument4 pagesSectorlionelmc09No ratings yet
- Procedimiento de MantenimientoDocument3 pagesProcedimiento de MantenimientoMayerly MuñozNo ratings yet
- Antecedentes Del ProyectoDocument19 pagesAntecedentes Del Proyectolionelmc09No ratings yet
- Encuesta Sobre Las Redes SocialesDocument1 pageEncuesta Sobre Las Redes Socialeslionelmc09No ratings yet
- Evacuacion Y Respuesta Ante EmergenciaDocument25 pagesEvacuacion Y Respuesta Ante Emergencialionelmc09No ratings yet
- Draft ISO 45001Document59 pagesDraft ISO 45001Made Cita100% (2)
- SectorDocument4 pagesSectorlionelmc09No ratings yet
- Directiva 009-2016-OSCE - CD Acciones de Supervisión PDFDocument10 pagesDirectiva 009-2016-OSCE - CD Acciones de Supervisión PDFDaniel Ibarra VelasquezNo ratings yet
- OxígenoDocument9 pagesOxígenoRîcardo MôraNo ratings yet
- Hoja de Seguridad de Pintura para TraficoDocument6 pagesHoja de Seguridad de Pintura para TraficoIngCivilPeru100% (2)
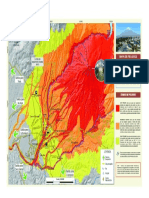
- Mapa de Peligros MistiDocument1 pageMapa de Peligros Mistilionelmc09No ratings yet
- Pautas Eval Ex Post Sector Transportes SnipDocument133 pagesPautas Eval Ex Post Sector Transportes SnipYulmerth Ortiz VilcaNo ratings yet
- Evaluacion Taller Mecanico-RuidoDocument68 pagesEvaluacion Taller Mecanico-RuidoDavid MoranNo ratings yet
- 28 - Pintura en Spray Abro °Document7 pages28 - Pintura en Spray Abro °PoLaNkA7790% (10)
- 04 42 PDFDocument3 pages04 42 PDFlionelmc09No ratings yet
- Directiva 010-2016-OSCE - CD Resumen EjecutivoDocument7 pagesDirectiva 010-2016-OSCE - CD Resumen EjecutivoPedro Juan Santos PalaciosNo ratings yet
- SEACE ConvocatoriaDocument27 pagesSEACE Convocatorialionelmc09No ratings yet
- Manual PacDocument32 pagesManual PacXianAllccahuaman100% (1)
- Manual PacDocument32 pagesManual PacXianAllccahuaman100% (1)
- 189912301423142rad4a775 PDFDocument28 pages189912301423142rad4a775 PDFAxssell Jurguen Cutipa QuispeNo ratings yet
- SEACE Obtenc. Usuario y ClaveDocument9 pagesSEACE Obtenc. Usuario y Clavelionelmc09No ratings yet
- Guía Rápida Buscador SEACEDocument21 pagesGuía Rápida Buscador SEACElionelmc09No ratings yet
- SEACE Obtenc. Usuario y ClaveDocument9 pagesSEACE Obtenc. Usuario y Clavelionelmc09No ratings yet
- Guía Rápida Buscador SEACEDocument21 pagesGuía Rápida Buscador SEACElionelmc09No ratings yet
- Ley de Contrataciones y To Del OSCEDocument222 pagesLey de Contrataciones y To Del OSCEDCELESTE50% (2)
- Amplificación con transistores bipolaresDocument1 pageAmplificación con transistores bipolaresjonaNo ratings yet
- Grf-005-04ef-Ef421-R0-101017 Memoria de CalculoDocument71 pagesGrf-005-04ef-Ef421-R0-101017 Memoria de CalculoJose Guillermo Vasquez LagosNo ratings yet
- NMX CH 058 1994Document8 pagesNMX CH 058 1994Vicente Alejandro100% (1)
- Reporte P2 - Lab - TermodinamicaDocument15 pagesReporte P2 - Lab - TermodinamicaAnnel AquinoNo ratings yet
- Ondas Mecánicas - 2Document28 pagesOndas Mecánicas - 2Marcelo PMNo ratings yet
- Tema 7Document2 pagesTema 7Laura Arias MancoNo ratings yet
- Sistemas trifásicos: generación y transporte de tensión trifásicaDocument22 pagesSistemas trifásicos: generación y transporte de tensión trifásicaJose Alfredo Gutierrez TorresNo ratings yet
- Práctico de La Unidad IDocument2 pagesPráctico de La Unidad IJHARPA NHYNHANo ratings yet
- Segunda Ley de La Termo IDocument7 pagesSegunda Ley de La Termo IFredySnkNo ratings yet
- Resistencia y PropulsiónDocument38 pagesResistencia y PropulsiónFernandez GonzaloNo ratings yet
- Laboratorio de Fisica 2 Péndulo FisicoDocument18 pagesLaboratorio de Fisica 2 Péndulo FisicoCëlëstë Řňż ČmčhNo ratings yet
- Momentos de Inercia y MomentosDocument17 pagesMomentos de Inercia y MomentosEver mixNo ratings yet
- Tema 9 (Impulso y Cantidad de Movimiento)Document3 pagesTema 9 (Impulso y Cantidad de Movimiento)TaniaNo ratings yet
- Dominion: C:Ertificado Caubraci6NDocument4 pagesDominion: C:Ertificado Caubraci6NSony GlzNo ratings yet
- P6 - Exp 44 - Transformadores de Distribución - LtymiDocument4 pagesP6 - Exp 44 - Transformadores de Distribución - LtymiLuis Enrique GutiérrezNo ratings yet
- Preguntas ColmarjDocument4 pagesPreguntas ColmarjJULIO ERNESTO GÓMEZ MENDOZANo ratings yet
- Taller Fisica OKDocument10 pagesTaller Fisica OKAndres CruzNo ratings yet
- FísicaDocument83 pagesFísicaJulieta Rearte CalivaNo ratings yet
- Taller PresionDocument4 pagesTaller PresionVictor Oyola0% (1)
- 1 Fluidización PDFDocument94 pages1 Fluidización PDFramcel chacoNo ratings yet
- Ex Amen Unidad 4Document3 pagesEx Amen Unidad 4Guillermo Avila ElizondoNo ratings yet
- TP1 2022Document2 pagesTP1 2022Jorge VillaroelNo ratings yet
- Leyes de Newton y BiomecanicaDocument4 pagesLeyes de Newton y BiomecanicadianeglezzNo ratings yet
- Tarea Semana Iacc 1Document5 pagesTarea Semana Iacc 1alexNo ratings yet
- Informe 7 (Principio de Arquimedes)Document11 pagesInforme 7 (Principio de Arquimedes)MATEO ESCORCIA SIERRANo ratings yet
- Corriente Alterna - Wikipedia, La Enciclopedia LibreDocument28 pagesCorriente Alterna - Wikipedia, La Enciclopedia LibreAngel de Jesus Nicoya VelasquezNo ratings yet
- Generadores eléctricos: Principios y tiposDocument15 pagesGeneradores eléctricos: Principios y tiposJuan AntonioNo ratings yet
- Practicas Con Clave 1Document40 pagesPracticas Con Clave 1Johnny Dayson Diaz RamirezNo ratings yet
- Laboratorio de Maquinas Electricas y TraDocument11 pagesLaboratorio de Maquinas Electricas y TraFreeman RiveraNo ratings yet
- 1° Año Fisica - Trabajo MecánicoDocument6 pages1° Año Fisica - Trabajo MecánicoNicole ArpiNo ratings yet