You might also like
- Informe DiarioDocument5 pagesInforme DiarioLuis Omar Shermann CuetoNo ratings yet
- Calendario 2022Document11 pagesCalendario 2022Luis Omar Shermann CuetoNo ratings yet
- INSCRITOS AL REGISTRO DE INSTALADORES DE ASCENSORES EN CHILEDocument6 pagesINSCRITOS AL REGISTRO DE INSTALADORES DE ASCENSORES EN CHILELuis Omar Shermann CuetoNo ratings yet
- Instalacion de Empaquetaduras en Plancha - Bolt Tightening WorksheetDocument2 pagesInstalacion de Empaquetaduras en Plancha - Bolt Tightening WorksheetLuis Omar Shermann CuetoNo ratings yet
- Guia Planificacion Anual 2022Document48 pagesGuia Planificacion Anual 2022Luis Omar Shermann CuetoNo ratings yet
- Nomina de Inscritos en Registro de Ascensores Al 25.11.2021 2Document6 pagesNomina de Inscritos en Registro de Ascensores Al 25.11.2021 2Luis Omar Shermann Cueto100% (2)
- EMG Servicios Fichas Retiro de Aguas Servidas Lodos y Riles en SubterráneosDocument2 pagesEMG Servicios Fichas Retiro de Aguas Servidas Lodos y Riles en SubterráneosLuis Omar Shermann CuetoNo ratings yet
- Comentario Semanal Empresas 8Document2 pagesComentario Semanal Empresas 8Luis Omar Shermann CuetoNo ratings yet
- Colbun Memoria 2021 ALTADocument427 pagesColbun Memoria 2021 ALTALuis Omar Shermann CuetoNo ratings yet
- GT Manual de Funcionamiento Gt-1dDocument6 pagesGT Manual de Funcionamiento Gt-1dLuis Omar Shermann CuetoNo ratings yet
- Catalogo 03 Amortiguadores HidraulicosDocument72 pagesCatalogo 03 Amortiguadores HidraulicosLuis Omar Shermann CuetoNo ratings yet
- planificación financiera mensualDocument5 pagesplanificación financiera mensualLuis Omar Shermann CuetoNo ratings yet
- Delta - Manual de Instalacion Version 10 - 2017Document41 pagesDelta - Manual de Instalacion Version 10 - 2017Carlos FrancoNo ratings yet
- Nomina de Inscritos en Registro de Ascensores Al 05.06.2019Document7 pagesNomina de Inscritos en Registro de Ascensores Al 05.06.2019Jaime AntonioNo ratings yet
- Mobil Glygoyle™ SeriesDocument6 pagesMobil Glygoyle™ SeriesLuis Omar Shermann CuetoNo ratings yet
- Hes 2021110473108Document1 pageHes 2021110473108Luis Omar Shermann CuetoNo ratings yet
- Manual SAP MM Usuario 1 PDFDocument94 pagesManual SAP MM Usuario 1 PDFLuis Omar Shermann Cueto100% (1)
- OM - Hilux - Hasta Nov 2017Document612 pagesOM - Hilux - Hasta Nov 2017Gerardo González100% (1)
- Brochure Bosques SPDocument9 pagesBrochure Bosques SPLuis Omar Shermann CuetoNo ratings yet
- SolicitudCD 18649413 341210Document1 pageSolicitudCD 18649413 341210Daniela MirandaNo ratings yet
- Herramientas x2Document5 pagesHerramientas x2Luis Omar Shermann CuetoNo ratings yet
- Herramientas x2Document5 pagesHerramientas x2Luis Omar Shermann CuetoNo ratings yet
- Omala S2 GDocument2 pagesOmala S2 GMiguel LazarteNo ratings yet
- Permiso Temporal: Carabineros de ChileDocument1 pagePermiso Temporal: Carabineros de ChileLuis Omar Shermann CuetoNo ratings yet
- Instructivo Cuarentena 120620Document13 pagesInstructivo Cuarentena 120620Luis PinaudNo ratings yet
- Caec 2F PDFDocument1 pageCaec 2F PDFLuis Omar Shermann CuetoNo ratings yet
- Calendario Chile 2020 PDFDocument1 pageCalendario Chile 2020 PDFLuis Omar Shermann CuetoNo ratings yet
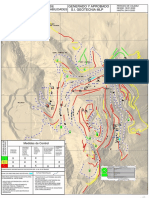
- Plano de Caída de Rocas 17-01-2020Document2 pagesPlano de Caída de Rocas 17-01-2020Luis Omar Shermann CuetoNo ratings yet
- Solicitud de terceros y permiso de áreaDocument2 pagesSolicitud de terceros y permiso de áreaPatricio Andres Berrios JofréNo ratings yet
- Prestadores Covid 19Document4 pagesPrestadores Covid 19Luis Omar Shermann CuetoNo ratings yet
- Transformadores secos TrihalDocument16 pagesTransformadores secos TrihalDenis Alexander Chavez PerezNo ratings yet
- Resumen Alimentadores y Demandas Ric 3Document2 pagesResumen Alimentadores y Demandas Ric 3Salvandoel PellejoNo ratings yet
- Catalogo Spa 2020Document256 pagesCatalogo Spa 2020Tescel SASNo ratings yet
- Motor Homopolar HorizontalDocument3 pagesMotor Homopolar HorizontalKevin LópezNo ratings yet
- Estandarizada de Fisica Grado SextoDocument2 pagesEstandarizada de Fisica Grado SextoNicolas MartinezNo ratings yet
- Revista de Motor de ArranqueDocument25 pagesRevista de Motor de Arranquemarcelo0% (1)
- Ecuaciones Diferenciales InformeDocument19 pagesEcuaciones Diferenciales InformeApaza Suyo EdsonNo ratings yet
- TP y Guias PDFDocument6 pagesTP y Guias PDFAndersson Monago MoralesNo ratings yet
- P6.FC - Circuito Divisor de Voltaje Eléctrico.Document1 pageP6.FC - Circuito Divisor de Voltaje Eléctrico.Ricky GonzaloNo ratings yet
- Redes CompensadasDocument6 pagesRedes CompensadasAlejandro Gil RestrepoNo ratings yet
- SRZ001 - EP - Subestaciones AT-MT - v1Document84 pagesSRZ001 - EP - Subestaciones AT-MT - v1CasemiroNo ratings yet
- AplicacionesDocument17 pagesAplicacionesAriel Basualto DiazNo ratings yet
- El Factor de PotenciaDocument5 pagesEl Factor de PotenciaJuan PastorNo ratings yet
- Como Instalar Un Relay de 5 PatasDocument2 pagesComo Instalar Un Relay de 5 PatasJose Cordova100% (1)
- Diaz Iñiguez Miguel Buck PDFDocument18 pagesDiaz Iñiguez Miguel Buck PDFMIGUEL ANGEL DIAZ INIGUEZNo ratings yet
- Trabajo Aplicado Caf 2Document11 pagesTrabajo Aplicado Caf 2Michelle HerreraNo ratings yet
- Manual de Laboratorio: Ingeniería ElectricaDocument129 pagesManual de Laboratorio: Ingeniería ElectricamorispNo ratings yet
- Riesgos Eléctrico, Químicos y BiológicosDocument18 pagesRiesgos Eléctrico, Químicos y BiológicosAlexander Moreno MartinezNo ratings yet
- Instalaciones Electricas EMEDocument260 pagesInstalaciones Electricas EMEDaniel ReyesNo ratings yet
- Prueba n2 Corriente Eléctrica (A)Document6 pagesPrueba n2 Corriente Eléctrica (A)Bastian Vargas ZúñigaNo ratings yet
- Trabajo Numeros Complejos y Imaginarios Del Segundo CorteDocument5 pagesTrabajo Numeros Complejos y Imaginarios Del Segundo CorteRoger Esteban Amaya GuerreroNo ratings yet
- Redes-Distribucion-de-Energia-Libro Samuel Ramirez Castaño PDFDocument927 pagesRedes-Distribucion-de-Energia-Libro Samuel Ramirez Castaño PDFjesus bastardo83% (23)
- Marco Teorico Energia Solar FVDocument37 pagesMarco Teorico Energia Solar FVboo_tas86% (7)
- Práctica 5Document5 pagesPráctica 5ethan pamatzNo ratings yet
- Redes y Protocolos IndustrialesDocument97 pagesRedes y Protocolos IndustrialeswizarderbrNo ratings yet
- Ley de Ohm Didactica Experimental IIDocument38 pagesLey de Ohm Didactica Experimental IIJorge Antonio Mora BejaranoNo ratings yet
- Informe 5 Arranque de Un Motor TrifasicoDocument6 pagesInforme 5 Arranque de Un Motor TrifasicoRichard Arizaga0% (1)
- Inacap - Unidad 2 - Ppt-Aspectos Tecnicos - 21 Mar 2023 - MgaDocument45 pagesInacap - Unidad 2 - Ppt-Aspectos Tecnicos - 21 Mar 2023 - MgaKarina Marisol Herrera Quintana0% (1)
- Cuadernillo - 1 - Lineas - de - Campo - Electrico - y - Magnetico - Reducido WordDocument10 pagesCuadernillo - 1 - Lineas - de - Campo - Electrico - y - Magnetico - Reducido Wordjuan avilaNo ratings yet
- Cap 02 Instrumentos-IndicadoresDocument21 pagesCap 02 Instrumentos-IndicadoresfaustoNo ratings yet