You might also like
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- Schedule-Based Transit Assignment: A New Dynamic Equilibrium Model With Explicit Vehicle Capacity ConstraintsDocument6 pagesSchedule-Based Transit Assignment: A New Dynamic Equilibrium Model With Explicit Vehicle Capacity Constraintsguido gentileNo ratings yet
- Dynamic Traffic Assignment: A Continuous Macroscopic Model: Guido GentileDocument27 pagesDynamic Traffic Assignment: A Continuous Macroscopic Model: Guido Gentileguido gentileNo ratings yet
- Spillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying BottlenecksDocument53 pagesSpillback Congestion in Dynamic Traffic Assignment: A Macroscopic Flow Model With Time-Varying Bottlenecksguido gentileNo ratings yet
- A Simulation-Optimization Model For Analyzing A Demand Responsive Transit System For Last-Mile Transportation - A - Torres - OtavoDocument8 pagesA Simulation-Optimization Model For Analyzing A Demand Responsive Transit System For Last-Mile Transportation - A - Torres - OtavoAlexis MinaNo ratings yet
- Dynamic Travel Time Prediction ModelsDocument14 pagesDynamic Travel Time Prediction Modelscristian_master100% (1)
- Real Time Rescheduling and Disruption Management For Public TransitDocument18 pagesReal Time Rescheduling and Disruption Management For Public TransitAhmad Reshad AnsarNo ratings yet
- Lectura Io 20202Document15 pagesLectura Io 20202Natalia CardenasNo ratings yet
- Long-Term Travel Demand Forecasting in General Dynamic Transportation NetworksDocument20 pagesLong-Term Travel Demand Forecasting in General Dynamic Transportation NetworksRufa mae BascompteNo ratings yet
- 26 StopInfo (TS2005)Document15 pages26 StopInfo (TS2005)guido gentileNo ratings yet
- Dynamic Assignment-Simulation Methodology For Multimodal Urban Transit NetworksDocument11 pagesDynamic Assignment-Simulation Methodology For Multimodal Urban Transit NetworksLyna HamadouNo ratings yet
- Delay at Bus Stops of Transmilenio Transport System According To Parameters Measured "In Situ". Case Study Bogotá-ColombiaDocument9 pagesDelay at Bus Stops of Transmilenio Transport System According To Parameters Measured "In Situ". Case Study Bogotá-ColombiajoehassNo ratings yet
- A Cellular Automaton Model of Public Transport System Based On Cruise ControlDocument6 pagesA Cellular Automaton Model of Public Transport System Based On Cruise ControlNabiel Putra AdamNo ratings yet
- Transportation Research Part C: Feng Shi, Shuo Zhao, Zhao Zhou, Pu Wang, Michael G.H. BellDocument30 pagesTransportation Research Part C: Feng Shi, Shuo Zhao, Zhao Zhou, Pu Wang, Michael G.H. BellNaimatullah Shafaq RahmatyarNo ratings yet
- Time and Space Discretization in Dynamic Traffic Assignment ModelsDocument10 pagesTime and Space Discretization in Dynamic Traffic Assignment Modelsguido gentileNo ratings yet
- Robust Network-Wide Bus Scheduling With Transfer SynchronizationsDocument11 pagesRobust Network-Wide Bus Scheduling With Transfer SynchronizationsLiangbin cuiNo ratings yet
- Line Planning in Public Transportation: Models and Methods: Anita SchöbelDocument20 pagesLine Planning in Public Transportation: Models and Methods: Anita SchöbelDarlyn LCNo ratings yet
- Fast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing AssignmentDocument48 pagesFast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing Assignmentguido gentileNo ratings yet
- Çapalar2018 Chapter OptimizationOfPassengerDistribDocument8 pagesÇapalar2018 Chapter OptimizationOfPassengerDistribAlok MandalNo ratings yet
- An Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion SpillbackDocument17 pagesAn Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion Spillbackguido gentileNo ratings yet
- DAcierno2017 Article MethodologyForDeterminingDwellDocument17 pagesDAcierno2017 Article MethodologyForDeterminingDwellAlok MandalNo ratings yet
- Transportation Research Part E: Yihui Wang, Tao Tang, Bin Ning, Lingyun MengDocument22 pagesTransportation Research Part E: Yihui Wang, Tao Tang, Bin Ning, Lingyun Mengfabiana24cbNo ratings yet
- Research Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsDocument14 pagesResearch Article: Travel Time Reliability For Urban Networks: Modelling and EmpiricsVishalBeheraNo ratings yet
- Transportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguDocument13 pagesTransportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguJulio CésarNo ratings yet
- A Shortest Path Problem in AnDocument13 pagesA Shortest Path Problem in Anelizajuhaeni285No ratings yet
- Transportation Research Part C: Hend Manasra, Tomer Toledo TDocument12 pagesTransportation Research Part C: Hend Manasra, Tomer Toledo TLAURA SANCHEZ RAMOSNo ratings yet
- AlgorithmdmtrixDocument29 pagesAlgorithmdmtrixVNo ratings yet
- Fagnant Kockelman2018 Article DynamicRide SharingAndFleetSizDocument16 pagesFagnant Kockelman2018 Article DynamicRide SharingAndFleetSizabkhaledNo ratings yet
- Symmetry 10 00391Document15 pagesSymmetry 10 00391lei liNo ratings yet
- Transportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TDocument15 pagesTransportation Research Part A: Patrick Manser, Henrik Becker, Sebastian Hörl, Kay W. Axhausen TSulav KafleNo ratings yet
- A Demand Model With Departure Time Choice For Within-Day Dynamic Traffic AssignmentDocument30 pagesA Demand Model With Departure Time Choice For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- A Modelling Platform For Optimizing Time-Dependent Transit Fares in Large Scale Multimodal NetworkDocument17 pagesA Modelling Platform For Optimizing Time-Dependent Transit Fares in Large Scale Multimodal Networkmanuel bosomtweNo ratings yet
- A Prediction Model For Bus Arrival Time at Bus Stop Considering Signal Control and Surrounding Traffic FlowDocument11 pagesA Prediction Model For Bus Arrival Time at Bus Stop Considering Signal Control and Surrounding Traffic FlowNanduri Naga SowriNo ratings yet
- QUT RouteChoiceDocument15 pagesQUT RouteChoiceSiddharth GuptaNo ratings yet
- Real-Time Optimization Model For Dynamic Scheduling of Transit OperationsDocument8 pagesReal-Time Optimization Model For Dynamic Scheduling of Transit OperationsGrigore DariiNo ratings yet
- Collective Traffic ForecastingDocument15 pagesCollective Traffic ForecastingnaufraghiNo ratings yet
- Efficient Derivation of Optimal Signal Schedule 2024 Simulation Modelling PRDocument21 pagesEfficient Derivation of Optimal Signal Schedule 2024 Simulation Modelling PRHamba AllahNo ratings yet
- Hybrid Model Predictive Control of Public Trans-Port OperationsDocument20 pagesHybrid Model Predictive Control of Public Trans-Port Operationsanuj1166No ratings yet
- Transport Capacity ConstraintsDocument11 pagesTransport Capacity ConstraintsOmkar ParishwadNo ratings yet
- Transportation Research Part A: Alejandro TirachiniDocument21 pagesTransportation Research Part A: Alejandro TirachiniVishalBeheraNo ratings yet
- Optimizing Bus Transit Network With Parallel Ant Colony AlgorithmDocument16 pagesOptimizing Bus Transit Network With Parallel Ant Colony AlgorithmKaio AlmeidaNo ratings yet
- Implementation of Bus Rapid Transit in Copenhagen A Mesoscopic Model ApproachDocument18 pagesImplementation of Bus Rapid Transit in Copenhagen A Mesoscopic Model ApproachdseahNo ratings yet
- Train-Scheduling Optimization Model For Railway Networks With Multiplatform StationsDocument25 pagesTrain-Scheduling Optimization Model For Railway Networks With Multiplatform Stationsgiby joseNo ratings yet
- Road Pricing For Congestion Control With UnknownDocument19 pagesRoad Pricing For Congestion Control With UnknownJuan Carlos Sanchez MedinaNo ratings yet
- Congestion CostDocument29 pagesCongestion CostAna-Maria CiobicaNo ratings yet
- Integrating The Informal With The Formal - An Estimation of The Impacts of A Shift From Paratransit Line - Haul To Feeder Service Provision in Cape TownDocument7 pagesIntegrating The Informal With The Formal - An Estimation of The Impacts of A Shift From Paratransit Line - Haul To Feeder Service Provision in Cape TownkutambaruNo ratings yet
- Valuing Crowding in Public Transport Implications For Costbenefit AnalysisDocument21 pagesValuing Crowding in Public Transport Implications For Costbenefit AnalysisDiego GaldinoNo ratings yet
- Ideal Flow Traffic Analysis: A Case Study On A Campus Road NetworkDocument12 pagesIdeal Flow Traffic Analysis: A Case Study On A Campus Road NetworkDiana SeguiNo ratings yet
- On-Demand High-Capacity Ride-Sharing Via Dynamic Trip-Vehicle AssignmentDocument6 pagesOn-Demand High-Capacity Ride-Sharing Via Dynamic Trip-Vehicle AssignmentAldo Contreras SalinasNo ratings yet
- A Practical Transit Network Design MethodDocument13 pagesA Practical Transit Network Design MethodVinay KorukondaNo ratings yet
- Accommodating User Preferences in The Optimization of Public Transport TravelDocument14 pagesAccommodating User Preferences in The Optimization of Public Transport TravelhoanghatmaiNo ratings yet
- Optimization of Headways and Departure Times in Urban BusDocument13 pagesOptimization of Headways and Departure Times in Urban BusAmul ShresthaNo ratings yet
- Bak PDFDocument21 pagesBak PDFSahana uNo ratings yet
- Zhao 2014Document21 pagesZhao 2014Michael Quispe BasilioNo ratings yet
- Data Mining and Big Freight Transport Database Analysis and Forecasting CapabilitiesDocument12 pagesData Mining and Big Freight Transport Database Analysis and Forecasting CapabilitiesRothili0n 1No ratings yet
- Transportation Research Part C: Xiaojie Luan, Francesco Corman, Lingyun MengDocument27 pagesTransportation Research Part C: Xiaojie Luan, Francesco Corman, Lingyun MengImags GamiNo ratings yet
- Research Article: A Data-Driven Urban Metro Management Approach For Crowd Density ControlDocument14 pagesResearch Article: A Data-Driven Urban Metro Management Approach For Crowd Density Controlmariane alexa buma-aNo ratings yet
- Special Issue On Modelling Passenger Flows in MultDocument1 pageSpecial Issue On Modelling Passenger Flows in Multbernadeth niduazaNo ratings yet
- Accuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolDocument5 pagesAccuracy of Link Travel Time Estimation Using Prob - 2003 - IFAC Proceedings VolNGUYEN MANHNo ratings yet
- IET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalDocument13 pagesIET Intelligent Trans Sys - 2022 - Zheng - Stochastic Simulation Based Optimization Method For Arterial Traffic SignalXia YangNo ratings yet
- 62 OperativeSpeed (MTITS2009)Document3 pages62 OperativeSpeed (MTITS2009)guido gentileNo ratings yet
- 59 DynCarPedInteraction (SIDT2009)Document6 pages59 DynCarPedInteraction (SIDT2009)guido gentileNo ratings yet
- Linear User Cost Equilibrium: A New Algorithm For Traffic AssignmentDocument34 pagesLinear User Cost Equilibrium: A New Algorithm For Traffic Assignmentguido gentileNo ratings yet
- 52 GLTMandDUE (DTA2008)Document22 pages52 GLTMandDUE (DTA2008)guido gentileNo ratings yet
- 61 Manual Addendum LUCE (VISUM2009)Document22 pages61 Manual Addendum LUCE (VISUM2009)guido gentile100% (1)
- 45 SignalStrategies (TRISTAN2007)Document7 pages45 SignalStrategies (TRISTAN2007)guido gentileNo ratings yet
- 39 MovGen (TS2007)Document35 pages39 MovGen (TS2007)guido gentileNo ratings yet
- 42 Firb (EWGT2006)Document15 pages42 Firb (EWGT2006)guido gentileNo ratings yet
- 56 ZoneClustering (SIDT2009)Document6 pages56 ZoneClustering (SIDT2009)guido gentileNo ratings yet
- 49 Section75Document21 pages49 Section75guido gentileNo ratings yet
- Time and Space Discretization in Dynamic Traffic Assignment ModelsDocument10 pagesTime and Space Discretization in Dynamic Traffic Assignment Modelsguido gentileNo ratings yet
- Fast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing AssignmentDocument48 pagesFast Heuristics For Continuous Dynamic Shortest Paths and All-Or-Nothing Assignmentguido gentileNo ratings yet
- An Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion SpillbackDocument17 pagesAn Implicit Path Enumeration Model and Algorithm For Dynamic Traffic Assignment With Congestion Spillbackguido gentileNo ratings yet
- 36 SustainableFreight (EWGT2005)Document6 pages36 SustainableFreight (EWGT2005)guido gentileNo ratings yet
- 31 RethinkWait (TRISTAN2004)Document8 pages31 RethinkWait (TRISTAN2004)guido gentileNo ratings yet
- Spillback Modelling in Dynamic Traffic Assignment Using Implicit Path EnumerationDocument8 pagesSpillback Modelling in Dynamic Traffic Assignment Using Implicit Path Enumerationguido gentileNo ratings yet
- 30 CordonPricing (WCTR2004)Document20 pages30 CordonPricing (WCTR2004)guido gentileNo ratings yet
- 27 AdvancedPolicies (TR2005)Document29 pages27 AdvancedPolicies (TR2005)guido gentileNo ratings yet
- 26 StopInfo (TS2005)Document15 pages26 StopInfo (TS2005)guido gentileNo ratings yet
- Macroscopic Arc Performance Models With Capacity Constraints For Within-Day Dynamic Traffic AssignmentDocument32 pagesMacroscopic Arc Performance Models With Capacity Constraints For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- A Demand Model With Departure Time Choice For Within-Day Dynamic Traffic AssignmentDocument8 pagesA Demand Model With Departure Time Choice For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- 24 SUE - Uniq (TS2003)Document38 pages24 SUE - Uniq (TS2003)guido gentileNo ratings yet
- A Demand Model With Departure Time Choice For Within-Day Dynamic Traffic AssignmentDocument30 pagesA Demand Model With Departure Time Choice For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- A Within-Day Dynamic Traffic Assignment Model For Urban Road NetworksDocument40 pagesA Within-Day Dynamic Traffic Assignment Model For Urban Road Networksguido gentileNo ratings yet
- 12 DTA - TransitLogit (SBDTM2002)Document5 pages12 DTA - TransitLogit (SBDTM2002)guido gentileNo ratings yet
- 15 NetworkPricingOptimization (TR2002)Document27 pages15 NetworkPricingOptimization (TR2002)guido gentileNo ratings yet
- Macroscopic Arc Performance Models For Within-Day Dynamic Traffic AssignmentDocument27 pagesMacroscopic Arc Performance Models For Within-Day Dynamic Traffic Assignmentguido gentileNo ratings yet
- Emea Cat Mo Wheel Bearings Catmo1802 2018-2019 en HQDocument1,164 pagesEmea Cat Mo Wheel Bearings Catmo1802 2018-2019 en HQJharomar BatacNo ratings yet
- Nueva EcijaDocument2 pagesNueva Ecijaclaude terizlaNo ratings yet
- Auto Medical 1Document24 pagesAuto Medical 1Péricles Ferreira LeiteNo ratings yet
- Cesna 172Document7 pagesCesna 172eng13No ratings yet
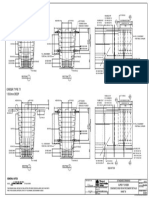
- Girder Type T3: Section 1 - Elevation Section 2Document1 pageGirder Type T3: Section 1 - Elevation Section 2Bo ĐoànNo ratings yet
- 165-Panama Circular Immersion SuitsDocument2 pages165-Panama Circular Immersion SuitsNeelakantan SankaranarayananNo ratings yet
- 22 - B56.11 4 2013 Rev 07 01 14 PDFDocument16 pages22 - B56.11 4 2013 Rev 07 01 14 PDFalexdaniel26No ratings yet
- ECS-LO-4 Online-WrittenDocument11 pagesECS-LO-4 Online-WrittenM.Kishore Kumar100% (3)
- PM 15Document16 pagesPM 15Daniel4044No ratings yet
- Perbedaan Motor Sinkron Dan Asinkron: Oleh 1. Akbar Putra 2. Brenda Yuniel 3. Galuh Ramadhan A.S 4. Muhammad Marozy EDocument11 pagesPerbedaan Motor Sinkron Dan Asinkron: Oleh 1. Akbar Putra 2. Brenda Yuniel 3. Galuh Ramadhan A.S 4. Muhammad Marozy EMarozi EffendiNo ratings yet
- Wa0000 PDFDocument76 pagesWa0000 PDFSumitNo ratings yet
- Ready Reckoner N1Document2 pagesReady Reckoner N1manojNo ratings yet
- 2015-05-07 Calvert County TimesDocument24 pages2015-05-07 Calvert County TimesSouthern Maryland OnlineNo ratings yet
- UNIT 1 - Materials & Logs Page 1-4-1Document4 pagesUNIT 1 - Materials & Logs Page 1-4-1Naufal ArndoNo ratings yet
- The New P 410 LA 6x2 MNA With Opticruise: Scania Haulage TrucksDocument2 pagesThe New P 410 LA 6x2 MNA With Opticruise: Scania Haulage TrucksCristian ChiruNo ratings yet
- Multi Wing Product Overview 2013Document12 pagesMulti Wing Product Overview 2013dharmeswarNo ratings yet
- Mermaid CommanderDocument2 pagesMermaid CommanderFatin AfraNo ratings yet
- Document Checklist For OCI in Lie of PIO CardDocument3 pagesDocument Checklist For OCI in Lie of PIO CardkarthiNo ratings yet
- Ssp278 - The Audi A4 CabrioletDocument64 pagesSsp278 - The Audi A4 CabrioletOblioCarliontatulOblio100% (1)
- ĐỀ SỐ 22Document5 pagesĐỀ SỐ 22Anh MaiNo ratings yet
- Air Travel Creates More Problems Than BenefitsDocument2 pagesAir Travel Creates More Problems Than BenefitsFung Jia YongNo ratings yet
- Gas-Liquid and Gas-Liquid-Solid ReactionsDocument100 pagesGas-Liquid and Gas-Liquid-Solid ReactionsBrian WilliamsNo ratings yet
- Curriculum Vitae: Rakesh Kumar GuptaDocument3 pagesCurriculum Vitae: Rakesh Kumar Guptachitranjan4kumar-8No ratings yet
- 2 Maintenance Schdule Blow Room, Carding DecDocument15 pages2 Maintenance Schdule Blow Room, Carding DecBHASKAR MITRANo ratings yet
- Ford Citroën AustinDocument2 pagesFord Citroën AustinMonsieur lapaditNo ratings yet
- Auction PricelistDocument7 pagesAuction PricelistEmanuel GabrielNo ratings yet
- Group 6 - RA 344 Accessibility LawDocument45 pagesGroup 6 - RA 344 Accessibility LawRoji VillacortaNo ratings yet
- CementDocument40 pagesCementanteid3100% (1)
- 8 Week Du Athlon Training PlanDocument1 page8 Week Du Athlon Training PlanBong BongarNo ratings yet
- 23 Frame Brushless DC Motors 40w To 120wDocument1 page23 Frame Brushless DC Motors 40w To 120wantonNo ratings yet