You might also like
- Traffic Congestion and Land Use Regulations: Theory and Policy AnalysisFrom EverandTraffic Congestion and Land Use Regulations: Theory and Policy AnalysisNo ratings yet
- Comparative Study of BRT and Multimodal Transportation in Makassar City and Rio de Jenairo CityDocument5 pagesComparative Study of BRT and Multimodal Transportation in Makassar City and Rio de Jenairo CityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Intelligent Transport Systems Complete Self-Assessment GuideFrom EverandIntelligent Transport Systems Complete Self-Assessment GuideNo ratings yet
- Time Occupancy As Measure of PCU at Four Legged RoundaboutsDocument13 pagesTime Occupancy As Measure of PCU at Four Legged Roundaboutsasd100% (1)
- Improvement of Bus Network in Hyderabad Using Visum: Naveen Kumar. G, C.S.R.K. Prasad, K.V.R. Ravi ShankarDocument16 pagesImprovement of Bus Network in Hyderabad Using Visum: Naveen Kumar. G, C.S.R.K. Prasad, K.V.R. Ravi ShankarAditya GuptaNo ratings yet
- Integrating The Informal With The Formal - An Estimation of The Impacts of A Shift From Paratransit Line - Haul To Feeder Service Provision in Cape TownDocument7 pagesIntegrating The Informal With The Formal - An Estimation of The Impacts of A Shift From Paratransit Line - Haul To Feeder Service Provision in Cape TownkutambaruNo ratings yet
- BRT LagosDocument20 pagesBRT LagosJorge Cuervo Erthisa100% (1)
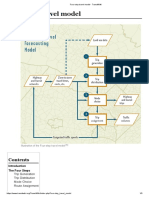
- Chapter 8 Travel Demand Model Forecasting ModelingDocument15 pagesChapter 8 Travel Demand Model Forecasting ModelingAlex KamaraNo ratings yet
- Beeston Park and Ride PlansDocument14 pagesBeeston Park and Ride PlansJohn BaronNo ratings yet
- CE431 Topic4 TripDistributionDocument14 pagesCE431 Topic4 TripDistributionKelsey Jan FloritaNo ratings yet
- Draft Strategy To Accelerate Public Transport Implementation 2007-2014Document72 pagesDraft Strategy To Accelerate Public Transport Implementation 2007-2014troy_13No ratings yet
- MRTSDocument18 pagesMRTSShobhit AcharyaNo ratings yet
- Tomorrow Together Public Open House BoardsDocument21 pagesTomorrow Together Public Open House BoardsconfluencescribdNo ratings yet
- Literature Review For Study of Characteristics of Traffic FlowDocument10 pagesLiterature Review For Study of Characteristics of Traffic FlowIJRASETPublicationsNo ratings yet
- CHARACTERISTICS OF PEDESTRIAN & VEHICLE MOTION STUDIESDocument59 pagesCHARACTERISTICS OF PEDESTRIAN & VEHICLE MOTION STUDIESMikealla DavidNo ratings yet
- Melbourne 2030 plan for sustainable transport growthDocument29 pagesMelbourne 2030 plan for sustainable transport growthdalrinoNo ratings yet
- TransportationDocument59 pagesTransportationJobert LledoNo ratings yet
- Traffic Flow Theory EditedDocument10 pagesTraffic Flow Theory EditedreyjNo ratings yet
- Oni A. O. PHD Thesis Main BodyDocument172 pagesOni A. O. PHD Thesis Main BodyPhemmy MushroomNo ratings yet
- Traffic ManagementDocument12 pagesTraffic ManagementTanisha BhattNo ratings yet
- Assignment 1Document6 pagesAssignment 1Bipin GyawaliNo ratings yet
- CREATE A CORRECTLY SCALED NETWORK FROM SCRATCHDocument5 pagesCREATE A CORRECTLY SCALED NETWORK FROM SCRATCHMauricio Senior RamírezNo ratings yet
- Integrated Multi Modal Public Transit Hub at CBD AhmedabadDocument73 pagesIntegrated Multi Modal Public Transit Hub at CBD AhmedabadArjun SatheeshNo ratings yet
- Heritage Walkway Reaches Practical CompletionDocument3 pagesHeritage Walkway Reaches Practical CompletionJDANo ratings yet
- Intermodal Transport Policy: A GIS-based Intermodal Transport Policy Evaluation ModelDocument242 pagesIntermodal Transport Policy: A GIS-based Intermodal Transport Policy Evaluation ModelEthem PekinNo ratings yet
- Urban Transport Rev)Document57 pagesUrban Transport Rev)mohit sharmaNo ratings yet
- Traffic Engineering: Instructor: Dr. Yahya Sarraj Associate Prof. in TransportationDocument31 pagesTraffic Engineering: Instructor: Dr. Yahya Sarraj Associate Prof. in TransportationKiplgat ChelelgoNo ratings yet
- Public Transport System: Dhuts Dhaka Urban Transport Network Development StudyDocument89 pagesPublic Transport System: Dhuts Dhaka Urban Transport Network Development StudyRamadan DurakuNo ratings yet
- HGD QP SolutionDocument68 pagesHGD QP Solutionmomin sialNo ratings yet
- Bus Rapid Transit Service Design: Recommended PracticeDocument27 pagesBus Rapid Transit Service Design: Recommended PracticeLasisi Kayode HassanNo ratings yet
- New Chris Hani Complex Will Maximize FunctionalityDocument3 pagesNew Chris Hani Complex Will Maximize FunctionalityJDANo ratings yet
- Planned and Paratransit Service Integration Through Trunk and Feeder ArrangementsDocument15 pagesPlanned and Paratransit Service Integration Through Trunk and Feeder ArrangementskutambaruNo ratings yet
- Applications, Advantages and Disadvantages of PhotogrammetryDocument6 pagesApplications, Advantages and Disadvantages of PhotogrammetryEnvirochem ConsultancyNo ratings yet
- FORM 5A3 - Comments ToRDocument4 pagesFORM 5A3 - Comments ToRDavid SabaflyNo ratings yet
- The Influence of Attitudes On Transit-Oriented Development An Explorative AnalysisDocument4 pagesThe Influence of Attitudes On Transit-Oriented Development An Explorative AnalysisSabri TaridalaNo ratings yet
- CE 254 Transportation Engineering: The Four-Step Model: II. Trip DistributionDocument86 pagesCE 254 Transportation Engineering: The Four-Step Model: II. Trip DistributionSala Eleganza SevillaNo ratings yet
- Final ToR BRT Incorporating The WB Comments Jan 12, 2011 2Document32 pagesFinal ToR BRT Incorporating The WB Comments Jan 12, 2011 2eafrica_gefNo ratings yet
- Four-Step Travel Model ExplainedDocument3 pagesFour-Step Travel Model Explainedabacus deeNo ratings yet
- City's Development Planning Unit Vists Jda's Infrastructure Projects KNDocument3 pagesCity's Development Planning Unit Vists Jda's Infrastructure Projects KNJDANo ratings yet
- Scientific Journal Explores Walkable Cities as Smart Mobility SolutionDocument8 pagesScientific Journal Explores Walkable Cities as Smart Mobility SolutionJhoar Paul De GuzmanNo ratings yet
- TOD Developer RCDocument37 pagesTOD Developer RCsamir_dattatreNo ratings yet
- Urban Transportation Planning: Topic:IntroductionDocument14 pagesUrban Transportation Planning: Topic:IntroductionSesay AlieuNo ratings yet
- Intelligent Transportation SystemDocument23 pagesIntelligent Transportation SystemAshok RajanavarNo ratings yet
- The Sustainable Mobility Paradigm David Banister Παραπομπή 6Document8 pagesThe Sustainable Mobility Paradigm David Banister Παραπομπή 6bkollarou9632No ratings yet
- UIC Traffic Engineering Course Fall 2006Document2 pagesUIC Traffic Engineering Course Fall 2006muhammad_farid_59No ratings yet
- Summary of Public LectureDocument3 pagesSummary of Public LectureDimas Adi PrasetyoNo ratings yet
- Chapter7-Pedestrian Crossing PHASESDocument81 pagesChapter7-Pedestrian Crossing PHASESMahindra DeshmukhNo ratings yet
- TASK 9 Kajang Local PlanDocument30 pagesTASK 9 Kajang Local PlanKhairussaadah MisnanNo ratings yet
- Transportation Engineering: Eng. Fuad Abdirizak ElmiDocument29 pagesTransportation Engineering: Eng. Fuad Abdirizak ElmiFuaad Abdirizak ElmiNo ratings yet
- Bus Rapit TransitDocument4 pagesBus Rapit TransitPapo TerencioNo ratings yet
- 10 - Level of ServiceDocument24 pages10 - Level of ServiceTrivesh MakenNo ratings yet
- IMPACTS OF TRAFFIC ON COMMERCIAL ACTIVITIES IN URBAN AREAS:by Yaweh Samuel KevinDocument20 pagesIMPACTS OF TRAFFIC ON COMMERCIAL ACTIVITIES IN URBAN AREAS:by Yaweh Samuel Kevinskyna4No ratings yet
- AGTM12 09 Guide To Traffic Management Part 12 Traffic Impacts of DevelopmentsDocument115 pagesAGTM12 09 Guide To Traffic Management Part 12 Traffic Impacts of DevelopmentsSubhash ChavaNo ratings yet
- Introduction of BRT Systems in Asia Accelerated Around 2004Document21 pagesIntroduction of BRT Systems in Asia Accelerated Around 2004Mohit ZalavadiaNo ratings yet
- Transit Terminal Capacity and Service QualityDocument50 pagesTransit Terminal Capacity and Service QualityKeerthana ElchuriNo ratings yet
- Transport Planning ProcessDocument46 pagesTransport Planning ProcessGoutham DevNo ratings yet
- Toolkit On Intelligent Transport System For Public Transport & BRTSDocument113 pagesToolkit On Intelligent Transport System For Public Transport & BRTSebinsams007No ratings yet
- Conceiving competitive public transportDocument18 pagesConceiving competitive public transportIrfanHardiansyahNo ratings yet
- CRA Presentation On Challenges and Opportunities of Kenya's New Devolved System of Governance - 9th November 2012Document41 pagesCRA Presentation On Challenges and Opportunities of Kenya's New Devolved System of Governance - 9th November 2012Commission on Revenue AllocationNo ratings yet
- Winnipeg Parking Strategy: A Conceptual FrameworkDocument55 pagesWinnipeg Parking Strategy: A Conceptual FrameworkElishaDaceyNo ratings yet
- UTG Scandinavian Transport Report - FinalDocument34 pagesUTG Scandinavian Transport Report - FinaldseahNo ratings yet
- Rethinking Timber BuildingsDocument100 pagesRethinking Timber BuildingsIulia ŢeneaNo ratings yet
- Good Practices in City Energy Efficiency Bogota, Colombia - Bus Rapid Transit For Urban TransportDocument10 pagesGood Practices in City Energy Efficiency Bogota, Colombia - Bus Rapid Transit For Urban TransportdseahNo ratings yet
- Data Sheet Allplan 2021 en GMBH WebDocument3 pagesData Sheet Allplan 2021 en GMBH WebdseahNo ratings yet
- Flyer NewIn Allplan 2021 EN GMBH Web PDFDocument5 pagesFlyer NewIn Allplan 2021 EN GMBH Web PDFdseahNo ratings yet
- 1995 10 PDFDocument111 pages1995 10 PDFdseahNo ratings yet
- User Win PDFDocument524 pagesUser Win PDFdseahNo ratings yet
- Rethinking Timber BuildingsDocument100 pagesRethinking Timber BuildingsIulia ŢeneaNo ratings yet
- Energy Efficient Elevator and EscalatorDocument122 pagesEnergy Efficient Elevator and EscalatorherrtammNo ratings yet
- Param Win PDFDocument183 pagesParam Win PDFdseahNo ratings yet
- A Component-Based Software Development and Execution Framework For Cax ApplicationsDocument5 pagesA Component-Based Software Development and Execution Framework For Cax ApplicationsdseahNo ratings yet
- Tiếng Anh 12 - Test for unit 4-5 - Test ADocument4 pagesTiếng Anh 12 - Test for unit 4-5 - Test AJasmineNo ratings yet
- The Electric Bike: Buyer S GuideDocument28 pagesThe Electric Bike: Buyer S GuideRenNo ratings yet
- Schedule Changes Without NoticeDocument2 pagesSchedule Changes Without NoticeMaverick HiuNo ratings yet
- Operations Management: Gokuldham Society: A Case Study On Transportation PlanningDocument3 pagesOperations Management: Gokuldham Society: A Case Study On Transportation PlanningMohit JainNo ratings yet
- 3.1 Status and Progress of Kathmandu Sustainable Urban Transport Project PDFDocument20 pages3.1 Status and Progress of Kathmandu Sustainable Urban Transport Project PDFBibhusit BistaNo ratings yet
- LEED in India Spotlights Sustainable Building GrowthDocument27 pagesLEED in India Spotlights Sustainable Building GrowthMichael WangNo ratings yet
- Handbook For Masterplanning & Value Creation For Railway Station (Re) DevelopmentDocument34 pagesHandbook For Masterplanning & Value Creation For Railway Station (Re) DevelopmentAnindita ChatterjeeNo ratings yet
- Kolkata City Bus RoutesDocument30 pagesKolkata City Bus Routesabhi_icisNo ratings yet
- Governments and Congestion: Prioritizing Public TransportDocument14 pagesGovernments and Congestion: Prioritizing Public TransportDarkLinkNo ratings yet
- Satirical Essays TopicsDocument4 pagesSatirical Essays Topicsmiwaj0pabuk2100% (2)
- Eurolines Spain TimetableDocument4 pagesEurolines Spain TimetableFranciscoNo ratings yet
- Abhibus Ticket: Amritsar KathuaDocument2 pagesAbhibus Ticket: Amritsar KathuaChetan RandhawaNo ratings yet
- Land Value Capture Case Study PDFDocument45 pagesLand Value Capture Case Study PDFSamir SharmaNo ratings yet
- Melbourne City Map: North Melbourne Fitzroy CarltonDocument1 pageMelbourne City Map: North Melbourne Fitzroy CarltonAna LúciaNo ratings yet
- E BilletDocument1 pageE Billetoui ouiNo ratings yet
- Mitigation ProjectDocument12 pagesMitigation ProjectMegha DalmiaNo ratings yet
- Ticket - AbibusDocument1 pageTicket - AbibusBoo Bala SaravananNo ratings yet
- Mountain Creek Interurban Bridge LandmarkDocument5 pagesMountain Creek Interurban Bridge LandmarkRachel Yates StoneNo ratings yet
- Service Failure in Jakarta Public Bus TransportDocument4 pagesService Failure in Jakarta Public Bus Transportyohana marianeNo ratings yet
- Importance of AC & Design for Minimizing Use in Offices & MallsDocument2 pagesImportance of AC & Design for Minimizing Use in Offices & MallsRitz BernalNo ratings yet
- PD City of Rockingham Centre Plan Final-Report Volume1 (Part2)Document54 pagesPD City of Rockingham Centre Plan Final-Report Volume1 (Part2)Purnama Sakhrial PradiniNo ratings yet
- TNSTC PDFDocument1 pageTNSTC PDFPaul RajuNo ratings yet
- Traffic Safety and City Public Transport System: Case Study of Bengaluru, India 2010Document30 pagesTraffic Safety and City Public Transport System: Case Study of Bengaluru, India 2010Disability Rights AllianceNo ratings yet
- Need StatementDocument2 pagesNeed StatementCheradee AnimNo ratings yet
- Ethiopia Addis Ababa Urban Transport and Land Use Support Project Resettlement Policy FrameworkDocument148 pagesEthiopia Addis Ababa Urban Transport and Land Use Support Project Resettlement Policy FrameworkHaileNo ratings yet
- An Android App for Online Bus Ticketing of Edsa CarouselDocument39 pagesAn Android App for Online Bus Ticketing of Edsa CarouselDaryll TorresNo ratings yet
- Nobina 2021 EngDocument113 pagesNobina 2021 EngPRIANTO BUTARBUTARNo ratings yet
- Manage COVID risks in public transportDocument8 pagesManage COVID risks in public transportbulbtommyNo ratings yet
- LMRC Project OverviewDocument20 pagesLMRC Project OverviewShivangi ChaudharyNo ratings yet
- Kolkata MetroDocument8 pagesKolkata MetromojahedNo ratings yet