You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tutorial - Python Scripting For XBMCDocument34 pagesTutorial - Python Scripting For XBMCIgnacio Fiesco100% (1)
- 5 OpenCart - FRSDocument12 pages5 OpenCart - FRSSrikanth ReddyNo ratings yet
- ResultSearch ForCollege - AspxDocument132 pagesResultSearch ForCollege - AspxgurudyalNo ratings yet
- VHDLHDocument5 pagesVHDLHgurudyalNo ratings yet
- VHDL Tutorial Chapter 5Document32 pagesVHDL Tutorial Chapter 5wizardvenkatNo ratings yet
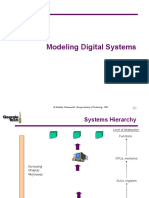
- Modeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006Document19 pagesModeling Digital Systems: © Sudhakar Yalamanchili, Georgia Institute of Technology, 2006mahendra singhNo ratings yet
- Chapter 4Document43 pagesChapter 4Kiran GunasegaranNo ratings yet
- Introduction To VHDLDocument13 pagesIntroduction To VHDLKomal VernekarNo ratings yet
- Chap-7 Memory and Programmable Logic 4th Ed. ManoDocument42 pagesChap-7 Memory and Programmable Logic 4th Ed. Manogurudyal100% (1)
- IRM Chapter 6e 15Document41 pagesIRM Chapter 6e 15ralucutza_neculaNo ratings yet
- Session 01Document41 pagesSession 01Nam Thanh NguyenNo ratings yet
- Towel Day 2010 - UI Council Update - Terho NiemiDocument9 pagesTowel Day 2010 - UI Council Update - Terho NiemiroelofdkNo ratings yet
- NielsenIQ Job Description - Entry Level EngineerDocument2 pagesNielsenIQ Job Description - Entry Level EngineerayhugNo ratings yet
- Android Programming For Beginners - Sample ChapterDocument50 pagesAndroid Programming For Beginners - Sample ChapterPackt PublishingNo ratings yet
- Chapter 4Document62 pagesChapter 4yola chattpgNo ratings yet
- Discovering The Value of IBM API Connect: Firmware Version: 5.0.0.1Document137 pagesDiscovering The Value of IBM API Connect: Firmware Version: 5.0.0.1Manish GuptaNo ratings yet
- ReadmeDocument3 pagesReadmeArk RNo ratings yet
- PLSQL Project Semester 2 StudentDocument3 pagesPLSQL Project Semester 2 Studentssmile50% (2)
- PowerShell DEFCONDocument287 pagesPowerShell DEFCONnameless100% (1)
- Compiler For Flat Tiny CDocument24 pagesCompiler For Flat Tiny CreddydvNo ratings yet
- Lab - 07 1 InglesDocument8 pagesLab - 07 1 InglesJeferson SallesNo ratings yet
- Advanced Java (Module 2)Document36 pagesAdvanced Java (Module 2)Sushma SumantNo ratings yet
- Healthy Body Wellness Center Case StudyDocument6 pagesHealthy Body Wellness Center Case StudyJoy MutindaNo ratings yet
- PRU211m - Slot 1 - Module 1 - Starting To ProgramDocument34 pagesPRU211m - Slot 1 - Module 1 - Starting To Programtrinhminh2907No ratings yet
- Linux Programming Lab RecordDocument29 pagesLinux Programming Lab RecordDVADONENo ratings yet
- Ieee 1517Document14 pagesIeee 1517Eduardo TrinidadNo ratings yet
- Instalando Joomla en Centos 7Document7 pagesInstalando Joomla en Centos 7Vicodj Victor FloresNo ratings yet
- Dot NET Interview QuestionsDocument4 pagesDot NET Interview QuestionsursarjunkNo ratings yet
- RGC Calypso ToolsDocument15 pagesRGC Calypso ToolsdurgaNo ratings yet
- Awp PracticalsDocument75 pagesAwp PracticalsAneeelNo ratings yet
- 12ekts Basic Optimizations For Roblox and More Fps XD Reduce Latency Nvidia 3d Settings and WindowsDocument13 pages12ekts Basic Optimizations For Roblox and More Fps XD Reduce Latency Nvidia 3d Settings and WindowsYTIntelFunNo ratings yet
- Classical Inheritance in JavaScriptDocument5 pagesClassical Inheritance in JavaScriptsivan englishNo ratings yet
- Owner's Manual: Designed and Engineered by Blackstar Amplification UKDocument9 pagesOwner's Manual: Designed and Engineered by Blackstar Amplification UKRangga PurnaNo ratings yet
- Online Auditorium Booking System FirstDocument65 pagesOnline Auditorium Booking System FirstAhmed Asid SalimNo ratings yet
- AVDF20 CookbookDocument47 pagesAVDF20 CookbookJAIMENo ratings yet
- H2G Install SAP Web IDE Locally For Trial (Mac Version)Document24 pagesH2G Install SAP Web IDE Locally For Trial (Mac Version)Andres VargasNo ratings yet
- Output LogDocument17 pagesOutput Logjulio cesarNo ratings yet