You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- IR-CFBC Boiiler 4th Generation BoilerDocument41 pagesIR-CFBC Boiiler 4th Generation BoilerJyoti Prakash Prusty100% (2)
- 1#unit Lightup Synchronisation & Shutdown (2) - 1Document42 pages1#unit Lightup Synchronisation & Shutdown (2) - 1Jyoti Prakash PrustyNo ratings yet
- Analysis On Performance of Condenser in Thermal Power Plant IJERTCONV5IS07008 PDFDocument4 pagesAnalysis On Performance of Condenser in Thermal Power Plant IJERTCONV5IS07008 PDFJyoti Prakash PrustyNo ratings yet
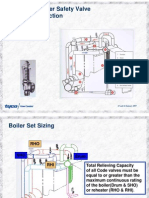
- Boiler Safety ValvesDocument21 pagesBoiler Safety ValvesParveen KohliNo ratings yet
- Steam - Drum - Level - Measurement PDFDocument18 pagesSteam - Drum - Level - Measurement PDFSenthil MuruganNo ratings yet
- Transformers: Erection, Commissioning, Operation and Maintenance Manual FORDocument229 pagesTransformers: Erection, Commissioning, Operation and Maintenance Manual FORJyoti Prakash Prusty100% (1)
- BFP ManualDocument308 pagesBFP ManualJyoti Prakash Prusty100% (1)
- ABB Transformer HandbookDocument213 pagesABB Transformer HandbookDragan Gigi100% (2)
- Electrostatic Precipitator Manual for Gas Cleaning PlantDocument79 pagesElectrostatic Precipitator Manual for Gas Cleaning PlantJyoti Prakash Prusty100% (3)
- Global Positioning SystemDocument20 pagesGlobal Positioning SystemJyoti Prakash PrustyNo ratings yet
- Advanced Supercritical Boiler Technologies SeminarDocument11 pagesAdvanced Supercritical Boiler Technologies SeminarNavneet Pandey0% (1)
- Automatic Voltage Regulation TechnologyDocument15 pagesAutomatic Voltage Regulation TechnologyJyoti Prakash PrustyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Volvo Excavator EC 290 B Battery Low Voltage Error Code SolutionDocument2 pagesVolvo Excavator EC 290 B Battery Low Voltage Error Code SolutionKo ZayNo ratings yet
- Developing EV Charging Stations in VietnamDocument28 pagesDeveloping EV Charging Stations in VietnamQuang Linh Lê100% (1)
- Wiring DiagramsDocument467 pagesWiring Diagramsjimmy0010No ratings yet
- Virtual Instrumentation ExplainedDocument2 pagesVirtual Instrumentation ExplainedAshok MadhanNo ratings yet
- ERMCO Single Phase Pole Mounted Distribution TransformersDocument4 pagesERMCO Single Phase Pole Mounted Distribution TransformersLuis MurilloNo ratings yet
- MK RepairsDocument141 pagesMK RepairsAnonymous SJyuwb0DNo ratings yet
- ASHIDA Numerical Single Pole Protection Relay FeaturesDocument14 pagesASHIDA Numerical Single Pole Protection Relay FeaturesSuranjana DasNo ratings yet
- Penyelesaian Tutorial Problem 40.3 Ebook BL. Theraja NO 1 Dan 2Document13 pagesPenyelesaian Tutorial Problem 40.3 Ebook BL. Theraja NO 1 Dan 2Restu RivalniNo ratings yet
- PGK 70 HBDocument34 pagesPGK 70 HBArturo Conde (Fonkel Mexicana)No ratings yet
- Dialight Safesight LED Area Light 2 7000Document16 pagesDialight Safesight LED Area Light 2 7000Gustavo GaibarNo ratings yet
- Fibre Optical Sources & DetectorsDocument17 pagesFibre Optical Sources & DetectorsDIPAK VINAYAK SHIRBHATE88% (16)
- Schneider Electric Educational Solutions 2018-115-117Document3 pagesSchneider Electric Educational Solutions 2018-115-117Amanda GamayaniNo ratings yet
- Neon Peak Trigger PDFDocument6 pagesNeon Peak Trigger PDFpfalencarNo ratings yet
- Movidrive Compact MCF/MCV/MCS4 - A: Operating InstructionsDocument112 pagesMovidrive Compact MCF/MCV/MCS4 - A: Operating InstructionsBrahem MoutiaNo ratings yet
- DC/DC converter CPC 1500B Series product descriptionDocument14 pagesDC/DC converter CPC 1500B Series product descriptiondavid mendezNo ratings yet
- EN RTU500 Modules V206Document77 pagesEN RTU500 Modules V206Srinivasan SriniNo ratings yet
- Phocos ManualDocument53 pagesPhocos ManualTafadzwa Kudzie BootrosNo ratings yet
- Neta Handbook Series I2c Transformers Vol 1 PDF 2 PDFDocument70 pagesNeta Handbook Series I2c Transformers Vol 1 PDF 2 PDFsoualmia Med El Amine100% (1)
- 9L05A - Regulador NegativoDocument13 pages9L05A - Regulador NegativoPrimitivoCarrilloSilgadoNo ratings yet
- BBD Bucket StandfordDocument33 pagesBBD Bucket StandfordKotorrNo ratings yet
- Ieee Gold Book Standard 493 2007Document3 pagesIeee Gold Book Standard 493 2007Patricia0% (2)
- Basic Concept of Phasor - Lecture NotesDocument8 pagesBasic Concept of Phasor - Lecture NotesEarl Patrick EugenioNo ratings yet
- 6: Electricity 2 - Topic Questions Paper 3: Year Series Paper NumberDocument8 pages6: Electricity 2 - Topic Questions Paper 3: Year Series Paper NumberrobinsonNo ratings yet
- Transformer: Low Voltage VT & AVR & CT & PTDocument2 pagesTransformer: Low Voltage VT & AVR & CT & PTUdo IheanachoNo ratings yet
- Science 10 9.4 The Lens EquationDocument31 pagesScience 10 9.4 The Lens Equationjeane san cel arciagaNo ratings yet
- Commissioning Manual - FinalDocument161 pagesCommissioning Manual - FinalRagab Tolba100% (1)
- Transformers Parts & Function of Each PartsDocument14 pagesTransformers Parts & Function of Each Partssnghvishal67% (3)
- UAA180 Based VU Meter - EEWeb CommunityDocument1 pageUAA180 Based VU Meter - EEWeb CommunityRicardo Alberto BarralNo ratings yet
- The Second Term Exam of EnglishDocument2 pagesThe Second Term Exam of Englishsof chimiste100% (1)
- AN - RF Current To Electric Field Strength Extrapolation - V1.0Document5 pagesAN - RF Current To Electric Field Strength Extrapolation - V1.0Michael MayerhoferNo ratings yet