You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- USS Flat Washer Size ChartDocument1 pageUSS Flat Washer Size ChartardserNo ratings yet
- Connection Summer 2015Document23 pagesConnection Summer 2015frankytgNo ratings yet
- Bronco Schematic Brake Systems PDFDocument1 pageBronco Schematic Brake Systems PDFardserNo ratings yet
- Bronco Schematic DrawworksDocument1 pageBronco Schematic DrawworksardserNo ratings yet
- Bronco Schematic Mobile RigsDocument1 pageBronco Schematic Mobile RigsardserNo ratings yet
- Bronco Schematic HooksDocument1 pageBronco Schematic HooksardserNo ratings yet
- Bronco Schematic Mud PumpsDocument1 pageBronco Schematic Mud PumpsardserNo ratings yet
- Assy Die Holder PDFDocument1 pageAssy Die Holder PDFardserNo ratings yet
- Bronco Schematic Drawworks PDFDocument1 pageBronco Schematic Drawworks PDFardserNo ratings yet
- Bronco Schematic BlocksDocument1 pageBronco Schematic BlocksFrancisco ElizarrarasNo ratings yet
- Bronco Schematic HooksDocument1 pageBronco Schematic HooksardserNo ratings yet
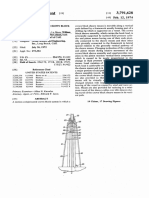
- Us 3791628Document19 pagesUs 3791628ardserNo ratings yet
- Workshop Practice Series - BooksDocument8 pagesWorkshop Practice Series - Bookscatapix100% (5)
- Us 8443877Document13 pagesUs 8443877ardserNo ratings yet
- Patent Brake System for DrawworksDocument9 pagesPatent Brake System for DrawworksardserNo ratings yet
- Patent Brake System for DrawworksDocument9 pagesPatent Brake System for DrawworksardserNo ratings yet
- Us 4498698Document14 pagesUs 4498698ardserNo ratings yet
- Instruction Manual Safety Principles, Operation and Maintenance For Travelling Chain BlocksDocument26 pagesInstruction Manual Safety Principles, Operation and Maintenance For Travelling Chain BlocksardserNo ratings yet
- Application of Reliability Centered Maintenance On A Drilling SystemDocument67 pagesApplication of Reliability Centered Maintenance On A Drilling SystemMohammad Reza NajafiNo ratings yet
- Measurement and Analysis in The Well: Logging, Permits Real-Time Detection of The Presence ofDocument18 pagesMeasurement and Analysis in The Well: Logging, Permits Real-Time Detection of The Presence ofardserNo ratings yet
- 2008 NHSTES Program WebDocument6 pages2008 NHSTES Program WebardserNo ratings yet
- Kelly SpinnerDocument10 pagesKelly Spinnerardser100% (1)
- Troubleshooting Vertical PumpsDocument38 pagesTroubleshooting Vertical PumpsmangatamritNo ratings yet
- Maint Procedures May11Document21 pagesMaint Procedures May11ardserNo ratings yet
- DrillingCompletion PDFDocument4 pagesDrillingCompletion PDFardserNo ratings yet
- WFT-Wholesale Product ListDocument123 pagesWFT-Wholesale Product ListzbhdzpNo ratings yet
- InfoMant ProductSheet enDocument1 pageInfoMant ProductSheet enardserNo ratings yet
- 555 Petroleum EngineeringDocument40 pages555 Petroleum EngineeringJafMnqvNo ratings yet
- Online Gearbox Configurator for Agitator DrivesDocument62 pagesOnline Gearbox Configurator for Agitator DrivesardserNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1993-11 The Computer Paper - Ontario EditionDocument84 pages1993-11 The Computer Paper - Ontario EditionthecomputerpaperNo ratings yet
- RTL and testbenches for synchronous and asynchronous RAM, FIFO and clock bufferDocument23 pagesRTL and testbenches for synchronous and asynchronous RAM, FIFO and clock bufferSuyash MishraNo ratings yet
- Sony HCD-EP313 Service Manual (P.N. - 987723704)Document44 pagesSony HCD-EP313 Service Manual (P.N. - 987723704)tm5u2rNo ratings yet
- Electronics Lab Assignment #3Document22 pagesElectronics Lab Assignment #3Hady BderNo ratings yet
- Dell Se178wfpc Service Manual PDFDocument73 pagesDell Se178wfpc Service Manual PDFBoata EtaNo ratings yet
- 140 Service Manual - Travelmate 6292Document101 pages140 Service Manual - Travelmate 6292Soporte Tecnico Buenos AiresNo ratings yet
- Ucc 28180Document46 pagesUcc 28180Sugeng HariadiNo ratings yet
- AMSAT-IARU Basic Analog Transponder Link Budget Rev1.6Document42 pagesAMSAT-IARU Basic Analog Transponder Link Budget Rev1.6Husein ZolotićNo ratings yet
- Proptotyping 5G Radio Using Adalm Pluto SDR With MATLAB CodeDocument8 pagesProptotyping 5G Radio Using Adalm Pluto SDR With MATLAB CodeSulaim King XNo ratings yet
- Digilent Synchronous Parallel Interface (DSTM)Document10 pagesDigilent Synchronous Parallel Interface (DSTM)Raul Gil BayardoNo ratings yet
- 2SB688Document2 pages2SB688aurelioewane2022No ratings yet
- BA01 - Analog IC DesignDocument8 pagesBA01 - Analog IC DesignCláudio RegisNo ratings yet
- Bu208 A, Bu508 A, Bu508 AfiDocument9 pagesBu208 A, Bu508 A, Bu508 AfiJose Fernandez LopezNo ratings yet
- Investigacion3 1-Lema Richard 4319Document15 pagesInvestigacion3 1-Lema Richard 4319Joel Lema ChulliNo ratings yet
- UMT Department of Electrical Engineering Communication Systems Final ExamDocument20 pagesUMT Department of Electrical Engineering Communication Systems Final ExamjameelahmadNo ratings yet
- How to Check a MOSFETDocument2 pagesHow to Check a MOSFETvishiwizardNo ratings yet
- PMM Works cable list for Wartsila Masbate power plantDocument5 pagesPMM Works cable list for Wartsila Masbate power plantCharlie MendozaNo ratings yet
- Can Communication PDFDocument35 pagesCan Communication PDFUmesh SanadiNo ratings yet
- FX PLC Manual 4daDocument8 pagesFX PLC Manual 4daBé HằngNo ratings yet
- Free - To - Air Satellite Receiver: Customer Careline 0901 293 0038Document24 pagesFree - To - Air Satellite Receiver: Customer Careline 0901 293 0038mythulasiNo ratings yet
- MX23C6410MC 10Document9 pagesMX23C6410MC 10tangbunna8696No ratings yet
- 741Document9 pages741Dimuthu DharshanaNo ratings yet
- Optimization of Four Wave Mixing Effect in Radio-Over-Fiber For A 32-Channel 40-GBPS DWDM SystemDocument6 pagesOptimization of Four Wave Mixing Effect in Radio-Over-Fiber For A 32-Channel 40-GBPS DWDM SystemLương Xuân Dẫn100% (1)
- StacoAVR2 PDFDocument20 pagesStacoAVR2 PDFmaungNo ratings yet
- SBNHH-1D65B Product Specifications (Comprehensive)Document5 pagesSBNHH-1D65B Product Specifications (Comprehensive)M KhurramNo ratings yet
- HUAWEI BTS3036 System Structure GuideDocument49 pagesHUAWEI BTS3036 System Structure GuideAbid AliNo ratings yet
- Digital Communications 3unitsDocument108 pagesDigital Communications 3unitsVenkata SatishNo ratings yet
- Single line diagram 132/33 kV GSS ChapraDocument1 pageSingle line diagram 132/33 kV GSS ChapraAyaz Ahmad KhanNo ratings yet
- Inspection Report: Material Inspected This VisitDocument25 pagesInspection Report: Material Inspected This VisitFrancis Astorga AriasNo ratings yet
- Operating System Concepts (Exercises and Answers) Part IIDocument7 pagesOperating System Concepts (Exercises and Answers) Part IIAlfred Fred100% (1)