You might also like
- Modeling The Hysteretic Response of Mechanical Connections For Wood StructuresDocument11 pagesModeling The Hysteretic Response of Mechanical Connections For Wood StructuresSheff_studentNo ratings yet
- Johnson Cook Fortran CodeDocument90 pagesJohnson Cook Fortran CodeJoe SatchNo ratings yet
- ACI PRC-364.6-22: Concrete Removal in Repairs Involving Corroded Reinforcing Steel-TechnoteDocument3 pagesACI PRC-364.6-22: Concrete Removal in Repairs Involving Corroded Reinforcing Steel-TechnoteMoGHNo ratings yet
- Physics 481: Condensed Matter Physics - Homework 10Document2 pagesPhysics 481: Condensed Matter Physics - Homework 10Mike GarciaNo ratings yet
- 2009 - Stiffness DistributionDocument9 pages2009 - Stiffness DistributionpaulkohanNo ratings yet
- (2002) A Finite-Element Model For The Analysis of Wrinkled Membrane StructuresDocument21 pages(2002) A Finite-Element Model For The Analysis of Wrinkled Membrane StructuresGregorius FilipusNo ratings yet
- 03.2019 - Effect of Shock and Vibration Preloading On The Parameters of Tear Dimples and Their ConglomeratesDocument11 pages03.2019 - Effect of Shock and Vibration Preloading On The Parameters of Tear Dimples and Their ConglomeratesFlick TornNo ratings yet
- A Micro-Computer Program For The Elastic-Plastic Analysis and Optimum Design of Plane FramesDocument7 pagesA Micro-Computer Program For The Elastic-Plastic Analysis and Optimum Design of Plane Framesjuan carlos molano toroNo ratings yet
- 5 Izzuddin, DowlingDocument10 pages5 Izzuddin, Dowlingminhthanha6No ratings yet
- Sla SettlementDocument8 pagesSla Settlementmagist23074No ratings yet
- International Journal of Mechanical Sciences: Mostafa AttarDocument15 pagesInternational Journal of Mechanical Sciences: Mostafa AttarDamarla KiranNo ratings yet
- Draft Samper 160128231 3571 CERVERA Et Al-1996-Earthquake Engineering & Structural DynamicsDocument24 pagesDraft Samper 160128231 3571 CERVERA Et Al-1996-Earthquake Engineering & Structural DynamicsMario Galindo QueraltNo ratings yet
- Probabilistic Finite Element Analysis of ConcreteDocument8 pagesProbabilistic Finite Element Analysis of ConcreteNATÁLIA SANTOS AQUINO DE ARAÚJONo ratings yet
- Stress ConcentrationsDocument0 pagesStress Concentrations777894292No ratings yet
- J. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationDocument20 pagesJ. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationSevim GüçlüNo ratings yet
- A I C S M B I D S: N Mproved Apacity Pectrum Ethod Ased On Nelastic Emand PectraDocument8 pagesA I C S M B I D S: N Mproved Apacity Pectrum Ethod Ased On Nelastic Emand PectraSuman Narsingh RajbhandariNo ratings yet
- Propped Cantilever Mesh Convergence Study Using Hexahedral ElementsDocument10 pagesPropped Cantilever Mesh Convergence Study Using Hexahedral ElementsSaad Al HelyNo ratings yet
- Inverse Detection of Flaws in Structures: 1523 - Frame - C12.fm Page 427 Thursday, August 28, 2003 5:54 PMDocument23 pagesInverse Detection of Flaws in Structures: 1523 - Frame - C12.fm Page 427 Thursday, August 28, 2003 5:54 PMLuis Adrian SigchaNo ratings yet
- 2008 CMAME MCCM NoDocument34 pages2008 CMAME MCCM NoherbertmgNo ratings yet
- 1.2.3 Damage Analysis of Masonry Structures Under Earthquake Action Using ANSYS-SoftwareDocument11 pages1.2.3 Damage Analysis of Masonry Structures Under Earthquake Action Using ANSYS-SoftwareLê TrungNo ratings yet
- Manuscript Conferencey Final PDFDocument9 pagesManuscript Conferencey Final PDFKariim DiíbNo ratings yet
- Analysis of Finite Element Mesh Spacing Influence On Modeling ResultsDocument4 pagesAnalysis of Finite Element Mesh Spacing Influence On Modeling ResultsGlobal Journal of Engineering and Scientific ResearchNo ratings yet
- 4jot 2Document8 pages4jot 2richard anishNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Approaches For The Calculation of Rayleigh Damping Coefficients For A Time-History AnalysisDocument11 pagesApproaches For The Calculation of Rayleigh Damping Coefficients For A Time-History AnalysisHamzah Al-HashemiNo ratings yet
- Finite Element Modelling and Analysis of Crack Shape Evolution in Mode-I Fatigue Middle Cracked Tension SpecimensDocument18 pagesFinite Element Modelling and Analysis of Crack Shape Evolution in Mode-I Fatigue Middle Cracked Tension SpecimenssenthilNo ratings yet
- Earthquake Risk Reduction and Seismic Safety Evaluation of Arch Dams Using Infinite ElementsDocument8 pagesEarthquake Risk Reduction and Seismic Safety Evaluation of Arch Dams Using Infinite ElementsGianfranco TacoNo ratings yet
- Finite Element Modeling of Net Panels Using A Net ElementDocument20 pagesFinite Element Modeling of Net Panels Using A Net ElementKtk ZadNo ratings yet
- Some Preliminaries: The Standard Discrete System: 1940s, Showed That Reasonably Good SoluDocument17 pagesSome Preliminaries: The Standard Discrete System: 1940s, Showed That Reasonably Good SoluZeljko LazarevicNo ratings yet
- Structural Analysis of A Conventional 9-13 Mar 84Document11 pagesStructural Analysis of A Conventional 9-13 Mar 84Muhammad Ahmad MustafaNo ratings yet
- A Finite Element Algorithm FOR Creep Crack GrowthDocument13 pagesA Finite Element Algorithm FOR Creep Crack GrowthRabiBasuNo ratings yet
- Macro Element MethodDocument53 pagesMacro Element MethodJony M. TemnikarNo ratings yet
- Belytschko Time IntegrationDocument29 pagesBelytschko Time IntegrationFoopiewNo ratings yet
- Anisotropic Modelling and Numerical Simulation of Brittle Damage in ConcreteDocument23 pagesAnisotropic Modelling and Numerical Simulation of Brittle Damage in ConcreteamarNo ratings yet
- Fracture, Fatigue, Failure and Damage Evolution, Volume 3Document6 pagesFracture, Fatigue, Failure and Damage Evolution, Volume 3Ali FahemNo ratings yet
- Beam With HingeDocument10 pagesBeam With HingeAnonymous Voi2G6No ratings yet
- Numerical Simulation of Lamb Wave Propagation in Metallic Foam A - A Parametric StudyDocument14 pagesNumerical Simulation of Lamb Wave Propagation in Metallic Foam A - A Parametric Studyrksingh2204No ratings yet
- Embedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannDocument22 pagesEmbedded Crack Model: I. Basic Formulation: Milan Jirãasek and Thomas ZimmermannRubén Darío RodariNo ratings yet
- Article 2Document11 pagesArticle 2Said EL FakkoussiNo ratings yet
- Determination of The Crack Resistance ParametersDocument7 pagesDetermination of The Crack Resistance ParametersВладислав КиричокNo ratings yet
- 2321-Article Text-10181-1-10-20110622Document23 pages2321-Article Text-10181-1-10-20110622steve rubioNo ratings yet
- Computers and Structures: F. Abdoun, L. Azrar, E.M. Daya, M. Potier-FerryDocument10 pagesComputers and Structures: F. Abdoun, L. Azrar, E.M. Daya, M. Potier-FerryDjamel-eddine TouaziNo ratings yet
- 0263 8231 (84) 90004 1 PDFDocument22 pages0263 8231 (84) 90004 1 PDFjuan carlos molano toroNo ratings yet
- Failure Analysis of Lattice Tower Like StructuresDocument9 pagesFailure Analysis of Lattice Tower Like StructuresFrancisco Javier Torres AlvaradoNo ratings yet
- Aiaa 2001 1640 555Document11 pagesAiaa 2001 1640 555Junghyun AhnNo ratings yet
- On A Systematic Approach For Cracked Rotating Shaft Study: Breathing Mechanism, Dynamics and InstabilityDocument16 pagesOn A Systematic Approach For Cracked Rotating Shaft Study: Breathing Mechanism, Dynamics and InstabilitySaberElAremNo ratings yet
- Discrete Element Modeling For Granular MaterialsDocument13 pagesDiscrete Element Modeling For Granular MaterialsIsimbi ToniNo ratings yet
- Caa Lab IntroductionDocument6 pagesCaa Lab IntroductionLokesh ReddyNo ratings yet
- Dymitis Et Al.Document10 pagesDymitis Et Al.fsimaNo ratings yet
- Arce504 FEM - ++++Document84 pagesArce504 FEM - ++++Vijay KumarNo ratings yet
- Mallet2013 Article EffectiveElasticPropertiesOfCrDocument8 pagesMallet2013 Article EffectiveElasticPropertiesOfCrHaziq QureshiNo ratings yet
- An Analytical Solution For Large Displacements of End-Loaded BeamsDocument20 pagesAn Analytical Solution For Large Displacements of End-Loaded BeamsGogyNo ratings yet
- A Plasticity Model and Algorithm For Mode-I Cracking in ConcreteDocument21 pagesA Plasticity Model and Algorithm For Mode-I Cracking in ConcretengNo ratings yet
- XFEM Comparison of KI Calculation MethodsDocument31 pagesXFEM Comparison of KI Calculation MethodsFaizan RashidNo ratings yet
- Diagnostic Analyses of Concrete Dams: Keywords: Inverse Problems, Parameter Identification, in Situ Tests, Concrete DamsDocument8 pagesDiagnostic Analyses of Concrete Dams: Keywords: Inverse Problems, Parameter Identification, in Situ Tests, Concrete DamsRazvanNo ratings yet
- Microstructure Based Creep Constitutive Model For Precipitation Strengthened Alloys: Theory and ApplicationDocument8 pagesMicrostructure Based Creep Constitutive Model For Precipitation Strengthened Alloys: Theory and Applicationhassan ghorbaniNo ratings yet
- Module 2 Lecture 5 Forming Analysis-SlabMethodDocument7 pagesModule 2 Lecture 5 Forming Analysis-SlabMethodsunilsharma853380No ratings yet
- Chapter 3. Plastic Analysis For Structure. BDocument36 pagesChapter 3. Plastic Analysis For Structure. BIyœ MøsisæNo ratings yet
- 11 CT 2 - 2019Document11 pages11 CT 2 - 2019Miguel FernándezNo ratings yet
- Technical Note Immersed Boundary Method Body Force For Flow Around Thin Bodies With Sharp EdgesDocument5 pagesTechnical Note Immersed Boundary Method Body Force For Flow Around Thin Bodies With Sharp EdgesKian ChuanNo ratings yet
- Identification Algorithm For Fracture Parameters by Combining DIC and FEM ApproachesDocument14 pagesIdentification Algorithm For Fracture Parameters by Combining DIC and FEM ApproachesBày RémNo ratings yet
- Accurate Electrostatic and Van Der Waals PullinDocument35 pagesAccurate Electrostatic and Van Der Waals Pullinhmsedighi459No ratings yet
- Ube Conveying Fluid Including Slip Boundary Condition and Strain Inertial Gradient TheoryDocument13 pagesUbe Conveying Fluid Including Slip Boundary Condition and Strain Inertial Gradient Theoryhmsedighi459No ratings yet
- Nonlocal Vibration and Instability Analysis of Embedded DWCNT PDFDocument16 pagesNonlocal Vibration and Instability Analysis of Embedded DWCNT PDFhmsedighi459No ratings yet
- Vibration of Nonlocal Kelvin-Voigt Viscoelastic DampedDocument13 pagesVibration of Nonlocal Kelvin-Voigt Viscoelastic Dampedhmsedighi459No ratings yet
- Application of Elastically Supported Single-Walled Carbon Nanotubes For Sensing Arbitrarily Attached Nano-ObjectsDocument10 pagesApplication of Elastically Supported Single-Walled Carbon Nanotubes For Sensing Arbitrarily Attached Nano-Objectshmsedighi459No ratings yet
- Design and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock SwitchDocument11 pagesDesign and Simulation of A Carbon Nanotube-Based Adjustable Nano-Electromechanical Shock Switchhmsedighi459No ratings yet
- Wave Propagation in Fluid-Filled Single-Walled Carbon PDFDocument13 pagesWave Propagation in Fluid-Filled Single-Walled Carbon PDFhmsedighi459No ratings yet
- Final Published 1002 JACMDocument9 pagesFinal Published 1002 JACMhmsedighi459No ratings yet
- Analysis and Modeling The Size Effect On Vibration of Functionally Graded Nanobeams Based On Nonlocal Timoshenko Beam TheoryDocument16 pagesAnalysis and Modeling The Size Effect On Vibration of Functionally Graded Nanobeams Based On Nonlocal Timoshenko Beam Theoryhmsedighi459No ratings yet
- Final Published 1001 JACMDocument9 pagesFinal Published 1001 JACMhmsedighi459No ratings yet
- Modeling The Size Dependent Pull-In Instability of Beam-Type NEMS Using Strain Gradient TheoryDocument24 pagesModeling The Size Dependent Pull-In Instability of Beam-Type NEMS Using Strain Gradient Theoryhmsedighi459No ratings yet
- ZTT OPGW 18-96689-56 Hilos Con 2 Capas - Ver.CDocument9 pagesZTT OPGW 18-96689-56 Hilos Con 2 Capas - Ver.CGiancarlos OliveraNo ratings yet
- Water Hammer Calculation FormulasDocument6 pagesWater Hammer Calculation FormulasAvinash Vasudeo100% (1)
- Review UASDocument6 pagesReview UASkarenNo ratings yet
- ENSC 461 Tutorial, Week#4 - IC EnginesDocument8 pagesENSC 461 Tutorial, Week#4 - IC Enginesandres179No ratings yet
- Mts 4036754 PDFDocument40 pagesMts 4036754 PDFAshish TripathiNo ratings yet
- BernoulliDocument4 pagesBernoulliOA AooNo ratings yet
- Tut 8Document1 pageTut 8Chandra Shekhar BishnoiNo ratings yet
- Lec# 09 Paschen's LawDocument15 pagesLec# 09 Paschen's LawshafquatNo ratings yet
- Determining The (In-Plane) Flow Rate Per Unit Width and Hydraulic Transmissivity of A Geosynthetic Using A Constant HeadDocument10 pagesDetermining The (In-Plane) Flow Rate Per Unit Width and Hydraulic Transmissivity of A Geosynthetic Using A Constant HeadtlcpinedaNo ratings yet
- Stable Pure-Iodide Wide-Band-Gap Perovskites For Efficient Si Tandem Cells Via Kinetically Controlled Phase EvolutionDocument17 pagesStable Pure-Iodide Wide-Band-Gap Perovskites For Efficient Si Tandem Cells Via Kinetically Controlled Phase EvolutionPeter GuoNo ratings yet
- BiotechnologyDocument2 pagesBiotechnologyLyka Mae Gemino TestaNo ratings yet
- ITP-Spacer Damper - Type Test PDFDocument4 pagesITP-Spacer Damper - Type Test PDFPrabhakar SvNo ratings yet
- Listunde 20240214rDocument20 pagesListunde 20240214rapi-522244020No ratings yet
- AerogelDocument1 pageAerogelHow are you HiNo ratings yet
- CH 7Document43 pagesCH 7Hossam AliNo ratings yet
- Residual StressDocument111 pagesResidual StressTimberlyNo ratings yet
- ENGG1500 Module 8 Tute SolutionsDocument15 pagesENGG1500 Module 8 Tute SolutionsKevin MalarkeyNo ratings yet
- AISI S910-13 - SDocument10 pagesAISI S910-13 - SEdison BecerraNo ratings yet
- Analysis of Fiber Reinforced Plastic Needle Gate For K.T. WeirsDocument5 pagesAnalysis of Fiber Reinforced Plastic Needle Gate For K.T. WeirsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- ProQuestDocuments 2024 04 04Document2 pagesProQuestDocuments 2024 04 04Theodøros D' SpectrøømNo ratings yet
- Pipe Stress Analysis and Layout of Hot and Cold PipingDocument27 pagesPipe Stress Analysis and Layout of Hot and Cold PipingJosé Antonio Alarcón LeónNo ratings yet
- PDF Card - Ni - CR - Fe - 00-035-1375Document1 pagePDF Card - Ni - CR - Fe - 00-035-1375mohammed sabeehNo ratings yet
- Parison of Dia para FerroDocument4 pagesParison of Dia para FerroMUNAZIRR FATHIMA FNo ratings yet
- Cement Chemistry - H.W. TaylorDocument12 pagesCement Chemistry - H.W. TaylorVaishnav Kumar100% (1)
- MasterEmaco ADH 326 (Concresive Liq)Document4 pagesMasterEmaco ADH 326 (Concresive Liq)RodCorniNo ratings yet
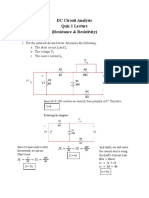
- Circuit Analysis Midterm Exam PDFDocument5 pagesCircuit Analysis Midterm Exam PDFJuanito CayNo ratings yet
- CQI-9 Heat Treat Assessment CarburizingDocument1 pageCQI-9 Heat Treat Assessment CarburizingBalram JiNo ratings yet
- Reinforcement Steel SpecificationDocument1 pageReinforcement Steel SpecificationVineeth MuraleedharanNo ratings yet