You might also like
- Serial Peripheral InterfaceDocument5 pagesSerial Peripheral InterfaceabhinavbitNo ratings yet
- Coding SPI SW PDFDocument5 pagesCoding SPI SW PDFblablablou100% (3)
- Serial Interfaces PDFDocument55 pagesSerial Interfaces PDFGaurav GrimReaper Roy100% (1)
- Designing of External Loader On QSPIDocument35 pagesDesigning of External Loader On QSPIealanlNo ratings yet
- Arm Instruction 2 - 001Document26 pagesArm Instruction 2 - 001Ankit SanghviNo ratings yet
- Embedded System On Pci: AbstractDocument12 pagesEmbedded System On Pci: AbstractbommojuvishuNo ratings yet
- Sigrok - Using Logic To Debug LogicDocument34 pagesSigrok - Using Logic To Debug Logicebbys89No ratings yet
- Embedded C ProgrammingDocument49 pagesEmbedded C Programmingmukesh_jangra100% (1)
- ARM Teaching MaterialDocument33 pagesARM Teaching MaterialViswa PraveenNo ratings yet
- Unit 4 SystemDesk 4Document10 pagesUnit 4 SystemDesk 4Farwa ZahidNo ratings yet
- Risc V PDFDocument117 pagesRisc V PDFSainadh YerrapragadaNo ratings yet
- Real Time Operating SystemsDocument44 pagesReal Time Operating SystemsAnand PatraNo ratings yet
- SystemC Primer 1 - 1Document79 pagesSystemC Primer 1 - 1Nguyễn Hữu TuyếnNo ratings yet
- Pci Bus End Point BlockDocument178 pagesPci Bus End Point Blockbkrishna_8888460% (1)
- Linux As An SPI Slave HandoutsDocument41 pagesLinux As An SPI Slave HandoutsJohnNo ratings yet
- Maxim Integrated - AutomotiveDocument32 pagesMaxim Integrated - AutomotivepHysiXNo ratings yet
- Systemc: Prof. Stephen A. EdwardsDocument58 pagesSystemc: Prof. Stephen A. EdwardsNitinSrivastavaNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set ArchitecturebalaNo ratings yet
- Atmel AVR Microcontroller Primer: Programming and InterfacingDocument194 pagesAtmel AVR Microcontroller Primer: Programming and InterfacingerwinNo ratings yet
- Inter-Process Communication - Wikipedia, The Free EncyclopediaDocument4 pagesInter-Process Communication - Wikipedia, The Free Encyclopediaswatisharma2608No ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- Basic Introduction On Matlab: A Textbook ofDocument17 pagesBasic Introduction On Matlab: A Textbook ofmeenaNo ratings yet
- VxWorks - Get StartedDocument13 pagesVxWorks - Get StartedRps Deepan100% (1)
- PMCL Index 2015 11 - Real-Time Operating SystemsDocument32 pagesPMCL Index 2015 11 - Real-Time Operating SystemsshilgiriNo ratings yet
- FreeRTOS - TasksDocument31 pagesFreeRTOS - TasksMani Kandan KNo ratings yet
- Easy8051 v6 Development SystemDocument4 pagesEasy8051 v6 Development SystemShobhit SinghNo ratings yet
- Basic Servo ControlDocument9 pagesBasic Servo ControlVinicius100% (1)
- Technical Seminar UARTDocument23 pagesTechnical Seminar UARTcharan467100% (1)
- 2.1. Overview of PCI Express BusDocument19 pages2.1. Overview of PCI Express BusSomasekhar ChepuriNo ratings yet
- BitBake User ManualDocument68 pagesBitBake User ManualSajjad AhmedNo ratings yet
- Serialflash PDFDocument39 pagesSerialflash PDFManoj Kumar MauryaNo ratings yet
- Security and Safety in Embedded ApplicationsDocument14 pagesSecurity and Safety in Embedded ApplicationsLinh Lê QuangNo ratings yet
- QEMU InternalsDocument10 pagesQEMU InternalstwifnesNo ratings yet
- Olimexino STM32Document19 pagesOlimexino STM32numero909No ratings yet
- Lal Usb Interface Vlsi 2010Document22 pagesLal Usb Interface Vlsi 2010Ygb RedaNo ratings yet
- LPC2148 ARM7 MicrocontrollerDocument80 pagesLPC2148 ARM7 MicrocontrollerChhaya Sharma100% (3)
- LAB 02 ControlDocument20 pagesLAB 02 Controlfiaz023No ratings yet
- WK - Creating Device DriversDocument54 pagesWK - Creating Device Driversjowihu100% (1)
- dSPACENews2006-3 AutomationDesk en Pn422Document2 pagesdSPACENews2006-3 AutomationDesk en Pn422TYu4443No ratings yet
- Full Text 02Document124 pagesFull Text 02AnoopNo ratings yet
- I2c Driver ArchitectureDocument12 pagesI2c Driver ArchitectureAkhilesh ChaudhryNo ratings yet
- Writing Device DriversDocument24 pagesWriting Device DriversmohitguptaNo ratings yet
- VxWorks Programmers Guide5.5Document539 pagesVxWorks Programmers Guide5.5regyamata100% (1)
- QNX NeutrinoDocument2 pagesQNX NeutrinoAbdul WadoodNo ratings yet
- Introduction To Ethernet TechnologyDocument47 pagesIntroduction To Ethernet TechnologySABIR HUSSAIN100% (1)
- 3.intertask Communication - Embedded OS PDFDocument8 pages3.intertask Communication - Embedded OS PDFPushpa Latha100% (1)
- LVGL v7Document173 pagesLVGL v7oanzarNo ratings yet
- UFS OverviewDocument37 pagesUFS OverviewprabhanatrajNo ratings yet
- Haps-54 March2009 ManualDocument74 pagesHaps-54 March2009 Manualjohn92691No ratings yet
- VX WorksDocument42 pagesVX Worksrakeshkalathil100% (1)
- Compiler (Very Imp.)Document10 pagesCompiler (Very Imp.)Saleh TarekNo ratings yet
- ARM Cortex-M0 OverviewDocument40 pagesARM Cortex-M0 OverviewKunil KudaNo ratings yet
- Basler Ace GigE Users ManualDocument360 pagesBasler Ace GigE Users ManualAyan Ghosh100% (1)
- OLED TechnologyDocument21 pagesOLED Technologysachin gupta100% (1)
- Simulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsDocument6 pagesSimulink Coder 8.0: Generate C and C++ Code From Simulink and Stateflow ModelsVijayalaxmi BiradarNo ratings yet
- Universal Serial Bus - Wikipedia, The Free EncyclopediaDocument27 pagesUniversal Serial Bus - Wikipedia, The Free EncyclopediaManitNo ratings yet
- Unicode - Wikipedia, The Free EncyclopediaDocument18 pagesUnicode - Wikipedia, The Free EncyclopediaManitNo ratings yet
- Utf-8 - Wikipedia, The Free EncyclopediaDocument10 pagesUtf-8 - Wikipedia, The Free EncyclopediaManitNo ratings yet
- FB 2201 - 2213 Digital Output WithDocument1 pageFB 2201 - 2213 Digital Output WithManitNo ratings yet
- Types of Capacitor - Wikipedia, The Free EncyclopediaDocument13 pagesTypes of Capacitor - Wikipedia, The Free EncyclopediaManitNo ratings yet
- Serial Peripheral Interface Bus - Wikipedia, The Free EncyclopediaDocument11 pagesSerial Peripheral Interface Bus - Wikipedia, The Free EncyclopediaManit100% (1)
- STK500 User GuideDocument61 pagesSTK500 User Guidetest202121No ratings yet
- Pads PowerpcbDocument8 pagesPads PowerpcbManitNo ratings yet
- Ethernet ATmega32/644 ExperimentierboardDocument9 pagesEthernet ATmega32/644 ExperimentierboardManit100% (3)
- SMDProcDocument2 pagesSMDProcRizwan Tanveer100% (1)
- Modbus - Wikipedia, The Free EncyclopediaDocument4 pagesModbus - Wikipedia, The Free EncyclopediaManitNo ratings yet
- PIC 16f877a Data SheetDocument234 pagesPIC 16f877a Data Sheetanon-26401438% (8)
- Errata Sheet: Integrated CircuitsDocument10 pagesErrata Sheet: Integrated CircuitsManitNo ratings yet
- GSM Developer Guide - GSM at Commands - Rev ADocument244 pagesGSM Developer Guide - GSM at Commands - Rev Aconsultsarath100% (2)
- LPC2148Document40 pagesLPC2148Bhulakshmi BoppanaNo ratings yet
- Low Cost SMD Soldering GuideDocument23 pagesLow Cost SMD Soldering Guidecan767No ratings yet
- Hands-On Session On Arm TargetsDocument2 pagesHands-On Session On Arm TargetsManitNo ratings yet
- AT CommandsDocument434 pagesAT CommandsSeshadev BarikNo ratings yet
- Multicast ConsiderationsDocument19 pagesMulticast Considerationsjorigoni2013No ratings yet
- LTE - PDF Interview Q&A ALLDocument43 pagesLTE - PDF Interview Q&A ALLBijaya RanaNo ratings yet
- HP 5120 EI Switch SeriesDocument14 pagesHP 5120 EI Switch SeriesKukimukiNo ratings yet
- VG 224 ConfigurationDocument6 pagesVG 224 Configurationelderly4meNo ratings yet
- Loki Tool IntroductionDocument32 pagesLoki Tool IntroductioninfoNo ratings yet
- 7010T Gigabit Ethernet Data Center Switches: Product HighlightsDocument7 pages7010T Gigabit Ethernet Data Center Switches: Product HighlightsabenyeungNo ratings yet
- EXPERIMENT NO. 9 Modulation Index and Power ConsiderationDocument12 pagesEXPERIMENT NO. 9 Modulation Index and Power Considerationez shintaishiNo ratings yet
- Work Force Management Workforce ManagementDocument27 pagesWork Force Management Workforce Managementdeepalim03No ratings yet
- Groove G30 DCI Data SheetDocument4 pagesGroove G30 DCI Data SheetElmer ErasoNo ratings yet
- User Manual 2195612Document2 pagesUser Manual 2195612BCservis BCservisNo ratings yet
- CCNA Security (640-554 IINS - Implementing Cisco IOS Network Security)Document3 pagesCCNA Security (640-554 IINS - Implementing Cisco IOS Network Security)DhavalNo ratings yet
- Controladora Sonido 32191-32196-32199Document1 pageControladora Sonido 32191-32196-32199janseta22No ratings yet
- How To Build Your Own Piso Wifi Vending Machine v2Document9 pagesHow To Build Your Own Piso Wifi Vending Machine v2Mantikar Ismael50% (2)
- Phoenix Contac (Modulos de Comunicacion)Document40 pagesPhoenix Contac (Modulos de Comunicacion)alfredoNo ratings yet
- HCIA-Intelligent Vision V1.0 Training MaterialDocument403 pagesHCIA-Intelligent Vision V1.0 Training MaterialTasos KorkodeilosNo ratings yet
- 3 - DHCP and Wireless Basic SecurityDocument3 pages3 - DHCP and Wireless Basic SecurityDmddldldldlNo ratings yet
- 01 - SkyEdge II - System Introduction - v6.0Document20 pages01 - SkyEdge II - System Introduction - v6.0MarcoNo ratings yet
- Systems Integration Rev DDocument9 pagesSystems Integration Rev Dgizzy99100% (1)
- Application Note An-00500: Antennas: Design, Application, PerformanceDocument7 pagesApplication Note An-00500: Antennas: Design, Application, PerformanceAnonymous 0qYv7WpgNo ratings yet
- CCNA Exploration 1: Basic Configuration PT Practice SBA - Network Fundamentals v4.0 Answers 2013-2014 Answer FullDocument10 pagesCCNA Exploration 1: Basic Configuration PT Practice SBA - Network Fundamentals v4.0 Answers 2013-2014 Answer FullMimmoNo ratings yet
- Veritas Netbackup™ Network Ports Reference Guide: Release 9.1Document23 pagesVeritas Netbackup™ Network Ports Reference Guide: Release 9.1黃國峯No ratings yet
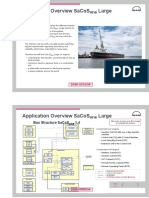
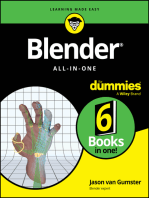
- Application Overview SaCosOneDocument10 pagesApplication Overview SaCosOneDwi MaryadiNo ratings yet
- Ip Multicast OverviewDocument6 pagesIp Multicast OverviewwoodksdNo ratings yet
- tl250 300 inst-ENDocument48 pagestl250 300 inst-ENsiteromNo ratings yet
- Assignment of Computer BT Insha Bba 2nd Sem.Document10 pagesAssignment of Computer BT Insha Bba 2nd Sem.Jungli BilliNo ratings yet
- Huawei E5172 Default Router Login and PasswordDocument2 pagesHuawei E5172 Default Router Login and PasswordIonutGonzo0% (1)
- Setup For UniFi HyppTV - MikroTik Support MalaysiaDocument20 pagesSetup For UniFi HyppTV - MikroTik Support Malaysiahangtuah79No ratings yet
- FDD Congestion Control ZTE eReader-BrowseDocument10 pagesFDD Congestion Control ZTE eReader-BrowseOrlando MedinaNo ratings yet
- Dial Plan v10Document1 pageDial Plan v10noisi80No ratings yet
- 2L4H ANT-ASI4517R3v06Document2 pages2L4H ANT-ASI4517R3v06Igor AguirreNo ratings yet
- The Internet Con: How to Seize the Means of ComputationFrom EverandThe Internet Con: How to Seize the Means of ComputationRating: 5 out of 5 stars5/5 (6)
- Social Media Marketing 2024, 2025: Build Your Business, Skyrocket in Passive Income, Stop Working a 9-5 Lifestyle, True Online Working from HomeFrom EverandSocial Media Marketing 2024, 2025: Build Your Business, Skyrocket in Passive Income, Stop Working a 9-5 Lifestyle, True Online Working from HomeNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (228)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- The Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineFrom EverandThe Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineNo ratings yet
- Laws of UX: Using Psychology to Design Better Products & ServicesFrom EverandLaws of UX: Using Psychology to Design Better Products & ServicesRating: 5 out of 5 stars5/5 (9)
- The YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueFrom EverandThe YouTube Formula: How Anyone Can Unlock the Algorithm to Drive Views, Build an Audience, and Grow RevenueRating: 5 out of 5 stars5/5 (33)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsFrom EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsRating: 5 out of 5 stars5/5 (3)
- Ultimate Guide to YouTube for BusinessFrom EverandUltimate Guide to YouTube for BusinessRating: 5 out of 5 stars5/5 (1)
- App Innovator's Guide: Mobile App Development for Android and iOS: Building Cross-Platform SolutionsFrom EverandApp Innovator's Guide: Mobile App Development for Android and iOS: Building Cross-Platform SolutionsNo ratings yet
- How to Do Nothing: Resisting the Attention EconomyFrom EverandHow to Do Nothing: Resisting the Attention EconomyRating: 4 out of 5 stars4/5 (421)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Branding: What You Need to Know About Building a Personal Brand and Growing Your Small Business Using Social Media Marketing and Offline Guerrilla TacticsFrom EverandBranding: What You Need to Know About Building a Personal Brand and Growing Your Small Business Using Social Media Marketing and Offline Guerrilla TacticsRating: 5 out of 5 stars5/5 (32)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (3)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- TikTok Algorithms 2024 $15,000/Month Guide To Escape Your Job And Build an Successful Social Media Marketing Business From Home Using Your Personal Account, Branding, SEO, InfluencerFrom EverandTikTok Algorithms 2024 $15,000/Month Guide To Escape Your Job And Build an Successful Social Media Marketing Business From Home Using Your Personal Account, Branding, SEO, InfluencerRating: 4 out of 5 stars4/5 (4)
- How to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyFrom EverandHow to Create Cpn Numbers the Right way: A Step by Step Guide to Creating cpn Numbers LegallyRating: 4 out of 5 stars4/5 (27)
- Ten Arguments for Deleting Your Social Media Accounts Right NowFrom EverandTen Arguments for Deleting Your Social Media Accounts Right NowRating: 4 out of 5 stars4/5 (388)
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsFrom EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Wordpress 2023 A Beginners Guide : Design Your Own Website With WordPress 2023From EverandWordpress 2023 A Beginners Guide : Design Your Own Website With WordPress 2023No ratings yet
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- Web Copy That Sells: The Revolutionary Formula for Creating Killer Copy That Grabs Their Attention and Compels Them to BuyFrom EverandWeb Copy That Sells: The Revolutionary Formula for Creating Killer Copy That Grabs Their Attention and Compels Them to BuyRating: 4 out of 5 stars4/5 (13)
- Kill All Normies: Online Culture Wars From 4Chan And Tumblr To Trump And The Alt-RightFrom EverandKill All Normies: Online Culture Wars From 4Chan And Tumblr To Trump And The Alt-RightRating: 3.5 out of 5 stars3.5/5 (240)