0% found this document useful (0 votes)
155 views5 pagesFPGA-Based Flight Control for UAVs
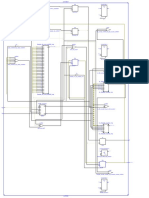
This document summarizes an analytical review of FPGA-based autonomous flight control systems for small UAVs. It discusses four techniques used in developing flight control systems: PID controllers, PID with Kalman filters, fuzzy logic controllers, and FPGA/DSP-based controllers. FPGA/DSP controllers are well-suited for small UAVs as they provide parallel processing, high integration, low power consumption, and fast response needed for real-time control. The document also provides a diagram of a basic flight control system and discusses discretization and parallelization techniques used in FPGA implementations.
Uploaded by
Mahesh MahiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
155 views5 pagesFPGA-Based Flight Control for UAVs
This document summarizes an analytical review of FPGA-based autonomous flight control systems for small UAVs. It discusses four techniques used in developing flight control systems: PID controllers, PID with Kalman filters, fuzzy logic controllers, and FPGA/DSP-based controllers. FPGA/DSP controllers are well-suited for small UAVs as they provide parallel processing, high integration, low power consumption, and fast response needed for real-time control. The document also provides a diagram of a basic flight control system and discusses discretization and parallelization techniques used in FPGA implementations.
Uploaded by
Mahesh MahiCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd