0% found this document useful (0 votes)
67 views4 pagesLinear Power Supply
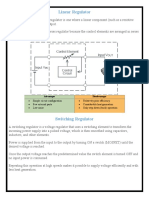
The linear regulator is an original form of power supply that relies on an active electronic device to drop voltage from an input to a regulated output. It wastes power as heat and gets hot. It finds use in applications where cooling is not an issue or where an electrically quiet supply is needed. Linear regulators are useful for supplying less than 10W due to heat generation. Key considerations for linear regulators include the minimum voltage difference between input and output needed for regulation (dropout voltage) and the power lost as heat between input and output voltages.
Uploaded by
Ragnar RagnarsonCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd
0% found this document useful (0 votes)
67 views4 pagesLinear Power Supply
The linear regulator is an original form of power supply that relies on an active electronic device to drop voltage from an input to a regulated output. It wastes power as heat and gets hot. It finds use in applications where cooling is not an issue or where an electrically quiet supply is needed. Linear regulators are useful for supplying less than 10W due to heat generation. Key considerations for linear regulators include the minimum voltage difference between input and output needed for regulation (dropout voltage) and the power lost as heat between input and output voltages.
Uploaded by
Ragnar RagnarsonCopyright
© © All Rights Reserved
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PDF, TXT or read online on Scribd