Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
Variable Power, Short Microwave Pulses
Generation using a CW Magnetron
Vasile SURDUCAN
1
, Emanoil SURDUCAN
1
, Radu CIUPA
2
1
National Institute for Research and Development of Isotopic and Molecular Technology,
65-103 Donath St., Cluj-Napoca, 400483, Romania,
2
Technical University Cluj-Napoca, Romania
vasile.surducan@itim-cj.ro
AbstractFine control of microwave power radiation in
medical and scientific applications is a challenging task. Since a
commercial Continuous Wave (CW) magnetron is the most
inexpensive microwave device available today on the market,
it becomes the best candidate for a microwave power generator
used in medical diathermy and hyperthermia treatments or
high efficiency chemical reactions using microwave reactors as
well. This article presents a new method for driving a CW
magnetron with short pulses, using a modified commercial
Zero Voltage Switching (ZVS) inverter, software driven by a
custom embedded system. The microwave power generator
designed with this method can be programmed for output
microwave pulses down to 1% of the magnetrons power and
allows microwave low frequency pulse modulation in the range
of human brain electrical activity, intended for medical
applications. Microwave output power continuous control is
also possible with the magnetron running in the oscillating
area, using a dual frequency Pulse Width Modulation (PWM),
where the low frequency PWM pulse is modulating a higher
resonant frequency required by the ZVS inverters
transformer. The method presented allows a continuous
control of both power and energy (duty-cycle) at the inverters
output.
Index TermsContinuous Wave Magnetron, Pulse Width
Modulation, Zero Voltage Switching, Microcontroller,
Microwave Pulse Modulation.
I. INTRODUCTION
Microwaves are electromagnetic radiations in the
frequency range of 300MHz and 300GHz, named also
centimeter waves. Microwave power radiation is widely
used in medical applications such as microwave diathermy
or microwave hyperthermia. The control of a temperature
rise generated by the microwave power deposition into the
tissue [1] is expressed in (1):
)
2
(
2
1
he
C
rms
E
c t
T
=
A
A
o
(1)
where the tissue temperature increase (T) in a
microwave thermal procedure is proportional with the
microwave power deposition into the tissue (Erms ) and the
irradiation time (t) (assuming the tissue is described by
quasi-constant parameters during the treatment time: -
conductivity, -density, c-specific heat, C -convection heat
exchange term from the Pennes approximation). The
boundary between the non-thermal and thermal effect
produced by a microwave radiation is debatable [2];
however, the maximum limit value accepted is the whole
body average SAR = 4, (Specific Absorption Rate) or a long
term exposure to a microwave power density of 50W/m . If
a microwave non-
2
he
2
thermal effect occurs, the temperature
increase of the body must be less than 0.2C-0.3C as
measured on an average irradiation time of 6 minutes. As
seen in (1), the effect of low microwave power can be
equilibrated by the human body reaction (it can be entirely
compensated by the blood flow) and the local effect of the
microwave irradiation becomes non-thermal. Non-thermal
effects of the microwaves can stimulate the patient's brain
activity during the treatment if the microwave field is
modulated with a specific frequency.
When both thermal and non-thermal effects are requested
during a microwave treatment, the driving system of a
microwave generator must control the microwave power,
the treatment time and the microwave energy deposition
with very good precision, allowing the use of a high
microwave power source for generating higher or lower
intensity radiations, as demanded. The CW commercial
magnetron (and its conventional power supply) is not
suitable, as it is, for low microwave power generation. For
example, the home appliance magnetron supply [3] is
controlling the magnetrons energy in ON-OFF sequences,
using the magnetrons maximum output power pulses. Such
a supply method can not be used safely for medical
applications, where too much power in the microwave pulse
can produce irreversible damages (burns) to the tissues.
Microwave pulses are inducing into the tissue biomolecular
dipolar displacement, free charge current or/and higher
resonant absorption than continuous microwave radiation.
An improved supply solution is either the usage of a multi-
coil transformer, supplying the magnetrons anodic voltage
with a determined pulse sequence [4] or a smart drive of the
magnetrons inverter supply, which allows a dynamic output
power control.
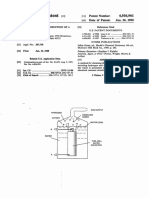
Figure 1. Magnetron aspect: 1-antenna, 2-mounting plate, 3-magnet, 4-
heatsink, 5-anode, 6-filter box, 7-cathode and filament terminals.
II. MAGNETRON OPERATION
The first magnetron was invented back in 1921 by the
49
1582-7445 2011 AECE
Digital Object Identifier 10.4316/AECE.2011.02008
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
American physicist Albert Hull [5] at General Electric.
However, the first resonant cavity magnetron, similar
with those used nowadays (Fig. 1), was developed in 1935
by the German physicist Hans Hollman [6] at Telefunken. A
magnetron is a high power microwave oscillator in which
the potential energy of an electron cloud near the cathode is
converted into microwave energy in a series of cavity
resonators. The safety working area (Fig. 2) of a magnetron
with a permanent magnet is determined by the magnetic
induction B
m
, dictated by the value of the maximum anode
voltage variation U
0
. The working area in the cylindrical
magnetron model [7], is defined between Hulls parabola (2)
and the synchronization line (3):
2
2
0
2
0
1
2
4
|
|
.
|
\
|
+
=
a
c
d
e
m
U
B
(2)
0 0
4
B d
N
f
U
c
~
t
(3)
Where: U
0
= anodic voltage [V], B
0
= magnetic field[G],
e = 1.60210 10
-19
[C], electron charge, m = 9.10910
-31
[Kg], electron mass, d =
a
-
c
cathode to anode distance
[m],
c
= cathode diameter [m],
a
= anode diameter [m], f =
microwave frequency [Hz], N = number of the resonant
cavities.
Figure 2. The safety working area of a magnetron: U
0C
-critical anode
voltage, B
0C
-critical magnetic field.
Figure 3. Cross-section schematic of the working magnetron: 1-the spatial
charge rotor, 2-lost electrons, 3-anode, 4-cathode, 5-rezonant cavity, d =
anode-cathode distance, E-electric field, B
m
-magnetic field.
Once the heater and anodic voltage are turned on,
electrons leave the heated cathode and are accelerated
toward the anode. The presence of a strong magnetic field
B
m
(Fig. 3) in the region between cathode and anode
produces a force on each electron which is perpendicular to
the electron velocity vectors, causing the electrons to spiral
away from the cathode in paths of various types of cycloids,
depending upon the initial electron velocity. The cloud of
electrons approaching the anode interacts with the
microwave field created in the resonators and the electrons
will either be slowed, if interacting with an opposing
microwave field, or accelerated, if they are in the vicinity of
an aiding microwave field. The slowed electrons will drift
toward the anode while the accelerated electrons will curl
back away from the anode. The result is a cloud of electrons
grouped in a spatial charge rotor with each spoke located at
a resonator having an opposing microwave field. On each
half cycle of the oscillation, the radiofrequency field pattern
will change its polarity and the spoke pattern of the spatial
charge rotor will rotate to maintain its presence in an
opposing field. The microwave energy maintained by the
spatial charge rotor is collected through a feeder to the
magnetrons antenna. The synchronism between the electron
spoke pattern and the radiofrequency field polarity (Fig. 3)
allows a magnetron to maintain a stable operation above the
synchronization area (Fig. 2) if the filament current and a
correct anodic voltage is sustained.
The static characteristic of the 2450MHz/1200W CW
magnetron (Fig. 4) is quasi-similar to a high voltage Zener
diode.
Figure 4. Experimental characteristic of a CW magnetron.
The cut-off voltage varies between 3.5KV (700W
magnetrons) to 4KV (1200W magnetrons) for different
commercial manufacturers. The magnetron efficiency varies
around the value of 75%. In discontinuous oscillation area,
the magnetron still oscillates if the anode voltage is slowly
decreased from typical 4.5KV until the cut-off voltage is
reached.
Figure 5. Electrical equivalent circuit model of magnetron.
Once the magnetron is off, it can be turned on again only if
supplied with the minimum anode voltage corresponding to
50
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
the continuous oscillation area. This behavior makes
difficult controlling the magnetron output power in the
discontinuous oscillation area, which in practice is an
avoided situation.
In the oscillating area, the voltage can be considered
almost constant (it is a linear voltage-current characteristic,
with small slope) and the microwave power of the
magnetron is proportional to its anode current. In the off-
cycle area the anode current becomes zero. The equivalent
electrical model (Fig. 5) of the magnetron is shown running
in the continuous oscillation area (1) (see Fig. 4), where
R1250..300 ohm and R
0
=V
ak
/I
a
. Both R
0
and R
1
are pure
resistors, D is an ideal diode, V
z
an ideal battery (the cut-off
voltage) and SW an ideal switch. If the inverter output
current capability is limited, once the magnetron runs in the
oscillating area, a voltage drop may appear.
III. QUASI-RESONANT ZERO VOLTAGE SWITCHING
INVERTER
The active clamp quasi-resonant zero voltage switching
inverter (ZVS), pulse width (PWM) and pulse frequency
modulated (PFM) structure (Fig. 6) comprises a main switch
IGBT Q1 and a sub-switch Q2, both feeding a step-up
transformer through a voltage resonant switching circuit
(Q2, C2, C1). Detailed switching algorithm of the circuit is
described in [8]-[11]. The main switch is driven from a logic
driver module, supplied from the main voltage through D3,
D4 and R4 and synchronized with the zero cross power
supply voltage. The logic module analyses the Q1 collector
amplitude voltage and the zero voltage switching time and
reads the current flow through TR1 using a current
transformer TR2. The sub-switch has a passive network
which acts as a signal forming and driver, Q2 being driven
by the Q1 collector voltage. In this way Q1 and Q2 are
turned ON and OFF with 180 phase shifting. The switching
frequency is around 30 KHz, reduced to 25-26 KHz during
ZVS period if PFM is active. The energy W transferred into
the TR1 is:
L t V W
onH dc
2 /
2 2
= (4)
Where: V
dc
= power supply voltage [V], t
onH
= turn on
switching time [s], L = transformer inductivity [H].
Figure 6. The standard ZVC inverter structure.
Modifying t
onH
controls the output anode current through
the magnetron U1, while the output voltage at TR1
secondary is rectified and doubled through D1, D2 and C4,
C5. Measuring U
fdbk
, the logic circuit holds the Q1 collector
voltage below 800V. The logic module driving Q1 has an
opto-isolated input S1-1 and an opto-isolated output S1-2.
The input signal is turning ON the inverter, while the output
is keeping the track of the ON time of the main switch
driver output.
TABLE I. ZVC ESSENTIAL COMPONENTS SPECIFICATIONS
Q1 Q2 C1 C2
Uc:1KV
Ic:60A
tf:0.25s
Uc:0.6KV
Ic:30A
tf:0.25s
0.1F/400V 0.45F/400V
TR1 D1, D2 C4, C5 R1
PRI:120H
S1: 28mH
S2: 0.49H
8KV/350mA
tf:0.15 s
8.2nF/3KV 100M/4KV
Where: Uc = collector voltage, Ic = collector current, tf = forward
switching time.
Two essential problems are encountered when using this
inverter in medical applications:
1. The shortest high voltage pulse width at the inverter
output is too large (Fig. 7), the finest microwave operational
efficiency range (5) is 14% at f
PWM
= 1 Hz; use of higher
PWM frequencies is not possible because of huge resolution
loss.
2. Acquiring short microwave pulses at the magnetron
output is impossible because the magnetron filament regime
time is minimum 5s and the filament is supplied from the
same anode voltage transformer.
Figure 7. Output voltage of the ZVS inverter, with 1mS input driving pulse
on S1-1.
IV. SOFTWARE PATTERN MODULATION
The classic inverter uses for the switching logic a custom
master slice IC of bipolar process, with fixed modulation
algorithms. Obtaining various types of pulse patterns and
controlling the anodic current is possible using a
programmable custom embedded design [12]. A dual PWM
modulation pattern has been implemented (Fig. 8). The
lower frequency PWM (F
PWML
) needed for microwave pulse
Figure 8. Dual PWM modulation technique, where:
L
= t
onL
/T
L
low
frequency (PWML) duty cycle,
H
= t
onH
/T
H
high frequency (PWMH)
duty cycle, P
p
= pulse peak power, P
avg
= pulse average power.
51
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
generation modulates a higher frequency PWM (F
PWMH
)
used for anode current control. The switching transformer
has been modified according to Faradays law, based on the
F
PWMH
value, power supply voltage value and core
parameters. We define the operational efficiency range of
the microwave radiation as 1% to 100% of the magnetron
output power, independent of the PWML frequency value in
(5):
L ef
O o =100 [%] (5)
loss,
th average secondary power resulted is defined by (6).
(6)
g
th t
onL
time and creates a proportional microwave power:
Considering the transformer power transfer without
e
p ef avg
P O P =
The pulse peak power P
p
controlled by
H
through the
energy transferred into the step-up transformer (4) is an
average power (7) of the high frequency t
onH
pulses durin
e
}
=
onH
Nt
onH
p
dt t i t e
t N
P
0
) ( ) (
1
(7)
clock /4 = 10.000.000 instructions
, bres_lo, bres_mid, bres_hi,
PWM routine*/
eriod
1
register
= 0 ?
id & hi = 0?*/
:*/
mulate the error*/
?
nitialize time_reg*/
d operational_efficiency?
restore W_register
pt
/*interrupt service routine end*/
/*10mS(100Hz) event with 40MHz
/100Hz = 100.000 = 01_86_A0*/
/*define registers: */
time_lo = 01h, time_mid=86h, time_hi=A0h, time_reg,
modulation_period = 100
operational_efficiency
/*define IO: PWML is IO pin */
/*define other routines: PWMH is high frequency
/*initialize:*/ time_reg = modulation_p
bres_lo = time_lo
bres_mid = time_mid +
bres_hi = time_hi
/*interrupt service routine start*/
define local: interrupt_exit,
save W_register, save status_
test bres_m id
yes, decrement bres_hi
no crement bres_mid , de
test bres_mid = 0 ?
no, goto interrupt_exit
yes, test bres_hi = 0 ? /*both m
no, goto interrupt_exit
yes, /*event occur, reload registers
bres_hi = time_hi
bres_mid = time_mid
bres_lo= bres_lo + time_lo /*cu
test bres_lo overflow
no, bres_mid = bres_m id + 1
yes, /*event action:*/
time_reg = time_reg 1
test time_reg = 0?
yes, time_reg = modulation_period /*i
no,
interrupt_exit: reset TMR0 interrupt flag
time_reg = modulation_period ?
yes, PWML = on, PWMH on
no,time_reg = modulation_perio
yes, PWML = off, PWMH off
no,
restore status_register,
return from interru
Figure 9. Zero error interrupt service routine, pseudo-code.
the pulse
vo
PWMH
n
IO pin*/
output A routed to pin_RP20:*/
/*config PWM period:*/
fig PWM duty_cycle:*/
/*config TMR2 prescaler:*/
P for PWM operation:*/
PWMH frequency/duty-cycle configuration end*/
-0] = 0b1100
PWMH on, routine end*/
0] = 0b0000
PWMH off, routine end*/
where N = t
onL
/T
H
=
L
T
L
/T
H
is the number of high
frequency pulses during t
onL
and e(t), i(t) are
ltage amplitude and current pulse respectively.
The dual modulated PWM is implemented with
Bresenhams zero error algorithm [13] using timer 0
(TMR0) for F
PWML
generation, and the compare-capture-
PWM module (CCP) of the microcontroller for F
generation.
The firmware was tested into an embedded system,
custom designed around the PIC18F44J11 microcontroller.
The code generates an event at every 10mS using 40MHz
clock frequency. The interrupt service routine is described
as pseudo-code in (Fig. 9) and should be read as normal
flow: only one of the conditional branches may be satisfied
once, the other passes the flow to the next pseudo-code
instruction. Since the oscillator frequency of the
microcontroller can ot be divided without error to get
10.00 mS period, Bresenham algorithm allows the
alternation of two imperfect time periods to produce an
average which match any ideal period.
/*route the PWMH channel output to
unlock PPS write control
/* PWM
RPOR20 = CCP1_P1A
lock PPS write control
pin_RP20_direction = output
/*PWMH frequency/duty-cycle configuration start*/
set PR2 register
/* con
set CCPR1L register
set CCP1CON bit [5,4]
set T2CON
/*config CC
set CCP1CON bit [3-0]
/*
/*PWMH on, routine start*/
CCP1CON bit [3
/*
/*PWMH off, routine start*/
CCP1CON bit [3-
/*
Figure 10. High frequency PWM generation, pseudo-code.
er: PWML=10Hz, 10%, bottom:
zo image of PWMH =29KHz, 11%.
Figure 11. Dual PWM screenshot, upp
om
52
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
53
The Bresenham computed delay value is stored in a 24bit
variable (three bytes) where the last significant byte is
keeping the positive or negative error on every occurred
event. The described interrupt routine (Fig. 9) allows
generating of zero error F
PWML
in the range of 0.4Hz to
50Hz. The high frequency PWM (F
PWMH
) routine pseudo-
code is described in (Fig. 10).
The protection circuit (A) was implemented
experimentally on a PCB prototype board (3, Fig. 13)
maintaining the pinout compatibility of the inverters
motherboard with the original daughter-card driver replaced
by it.
After the embedded system was set with a fixed
operational efficiency range of 100%, the high frequency
duty cycle (PWMH) has been varied in the range 10-40%
and the output parameters of the inverter were measured
using the experimental setup from (Fig. 14). The output
power versus PWMH duty cycle has a linear variation on
the entire driving range (Fig. 15), while the output inverter
voltage is constant rather the PWMH duty cycle.
V. MODIFIED INVERTER CHARACTERISTICS
The modified inverter keeps the power switching
structure from (Fig. 6) unaltered, with essential hardware
modifications on the driving and protection circuitry side.
The transformer TR2 was added for continuous filament
heating of the magnetron (3.3V/10A). TR2 matches the
isolation requirements since its secondary voltage has the
same potential as the anodic voltage. The protection and
driver circuitries (Fig. 12, A) are using fast comparators for
sensing the voltage and current of Q1 during switching and
ultra-fast optocouplers interfacing with the driving
embedded system. The modified inverter uses a combined
protection circuit, the hardware loop (A) which controls a
current limiting device (C) and the software loop, which
controls the input signal generation on S1-1 and follows the
feedback on S1-2. The inverters hardware closed loop is
faster (around 250nS) than the software loop implemented
in the embedded system which drives the inverter. The
feedback signal on S1-2 is active high only when either the
current or the voltage on the main switch Q1 is higher than
recommended values.
Figure 14. The experimental measurement setup.
Figure 12. Modified ZVC structure, software pattern controlled: A-
protection and driver circuitry, B-forming and driver circuitry, C-current
limiting circuit.
Figure 15. Inverter output characteristic, experimental result.
The experimental setup chain (Fig. 16) used for
measuring the microwave generator spectrum is based on an
Agilent E4402B spectrum analyzer (5) connected to the
waveguide (2a) of the microwave generator (2) through a
directional coupler (2a) and a variable attenuator (4).
Figure 16. Experimental setup for microwave spectrum measurement: 1-
embedded system, 2-microwave generator, 2a-waveguide, 3-directional
coupler, 4-variable attenuator, 5-spectrum analyzer.
Figure 13. Modified inverter appearance: 1-step-up transformer, 2-heatsink:
2a-main switch, 2b-subswitch, 2c-bridge, 3-protection and driver circuitry,
4-voltage doubler, 5-DC smoothing filter, 6-embedded system driving
connector.
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
Advances in Electrical and Computer Engineering Volume 11, Number 2, 2011
The magnetron is driven by our custom embedded system
[12] using the modified inverter (Fig. 13). The magnetron
output power value was software-set to approx. 125W and
the peak power was measured on the spectrum analyzer
(Fig. 17). The measured pulse pack bandwidth is 70MHz,
about 15% larger than observed on conventional CW
magnetron spectrum.
The ripple voltage of the inverter power supply adds a
modulation of the microwave pulses (Fig. 17) due to the
magnetron passing between the continuous oscillating area
to the off-cycle area and backward.
Figure 17. The microwave spectrum at the generator output: center
frequency 2450MHz, span 200MHz, maximum generator pulse amplitude
-35dBm (measured amplitude) +86dB (total attenuation), whole pulses
bandwidth 70MHz.
VI. CONCLUSIONS
Driving a ZVS inverter with a pattern modulation entirely
software-generated from an auxiliary embedded system is a
delicate task, mainly because the firmware is dedicated to
multiple time-consuming tasks (temperature measurement,
RTC generation, communication, data storage, etc.).
Designing protective circuits for the power section, which is
running under heavy switching conditions (current pulses up
to 50A at 800V on the main switch), is mandatory. Since an
embedded system firmware may exhibit random
bottlenecks, unexpected delays in the program flow or even
parasitic glitches on the IO pins, maintaining the inverter in
the safe operating area is very important. On the other hand,
the software pattern generated by the firmware is reflected
in the output inverter parameters, so a complete validation
process of the firmware [14] is also necessary. The method
presented here allows a large range of microwave power
variation (100W-1200W) and energy variation (1% to 100%
of any programmed power value, with variable period) at
the CW magnetron output, being as far as we know a novel
method for supplying a CW magnetron and obtaining short
microwave pulses. The complexity of our proposed and
tested solution is entirely compensated by the advantage of
obtaining fine software-controlled pulses of microwave
radiation, as required by medical treatments or other
processes in scientific and industrial applications. The
pattern can be configured for the generation of both fixed
and variable frequency PWM, allowing the usage of the
method for driving other inductive load devices as well.
REFERENCES
[1] V. Surducan, E. Surducan, R. Ciupa, Medical and scientific
apparatus with microwave thermal and non-thermal effect
Nonconventional Technology Review, Nr. 1, pp.42-49, 2010, [Online].
Available: http://www.revtn.ro/no1-2010.html.
[2] P. Vecchia, R. Matthes, G. Zieglerberger, J. Lin, R. Saunders, A.
Zwerdlow, Exposure to high frequency electromagnetic fields,
biological effects and health consequences (100KHz-300GHz) pp.4,
ICNIRP 16/2009 [Online]. Available:
www.icnirp.de/documents/RFReview.pdf.
[3] R. Narita, H. Kako, H. Imamura, Magnetron Drive Apparatus, patent
US4858095, 1989, [Online]. Available:
www.freepatentsonline.com/4858095.html.
[4] E. Surducan, V. Surducan, "Procedeu si instalatie pentru procesarea
dinamica a substantei in camp de microunde de putere" patent RO
00122063, 2008 [Online]. Available: http://bd.osim.ro/cgi-
bin/invsearch8.
A. W. Hull, The magnetron Journal of the American Institute of [5]
Electrical Engineers, vol. 40, no. 9, pages 715-723, September 1921.
[6] H. E. Hollman Magnetron US patent 2123728, in Germany:
November 29 1935, in USA: July 12, 1938 [Online]. Available:
http://patft.uspto.gov/netahtml/PTO/patimg.htm .
Ghe. Rulea, Tehnica frecven [7] elor foarte nalte Editura Tehnica
Bucureti 1966, pp323, pp334.
[8] D. Bessyo et all High frequency heating apparatus US patent
6362463 B1, 2002 [Online]. Available:
www.freepatentsonline.com/6362463.html.
[9] E. Miyata, S. Hishikawa, K. Matsumoto, M. Nakaoka, D. Bessyo, K.
Yasui, I. Hirota, H. Omori, Quasi-resonant ZVS PWM Inverter-fed
DC-DC Converter for Microwave Oven and its Input Harmonic
Current Evaluations, Industrial Electronics Society, 1999. IECON
'99 Proceedings. The 25th Annual Conference of the IEEE [Online].
Available: http://dx.doi.org/10.1109/IECON.1999.816498.
[10] D. Bessyo, K. Yasui, M. Nakaoka, A method of Decreasing the
Harmonic Distorsion for Inverter Microwave Oven, Electronics and
Communications in Japan, part1, vol.85, no.4, pp.1528-1537, 2002
[Online]. Available: http://dx.doi.org/10.1002/ecja.1087.
[11] M. Ishitobi, S. Moisseev, L. Gamage, M. Nakaoka, D. Bessyo, H.
Omori, Pulse Width and Pulse Frequency Modulation Pattern
Controlled ZVS Inverter Type AC-DC Power Converter with
Lowered Utility AC Grid Side Harmonic Current Components for
Magnetron Drive, Power Electronic Specialists Conference, Cairns,
Qld., Australia, pp 2062-2066, IEEE 2002 [Online]. Available:
http://dx.doi.org/10.1109/PSEC.2002.1023118.
[12] V. Surducan, E. Surducan, R. Ciupa, M. Roman, Embedded system
controlling microwave generators in
hyperthermia and diathermy medical devices, IEEE International
Conference on Automation, Quality and Testing, Robotics 2010,
pp.366-371, ISBN978-1-4244-6722-8, Cluj-Napoca, Romania,
[Online]. Available: http://dx.doi.org/10.1109/AQTR.2010.5
R. Black, Zero error-1second timing [Onli
520705.
ral
requirements for safety. Programmable medical electrical systems.
[13] ne]. Available:
http://www.romanblack.com/one_sec.htm .
IEC60601-1-4, Medical electrical equipment, Part 1-4: Gene [14]
54
[Downloaded from www.aece.ro on Tuesday, May 15, 2012 at 00:17:33 (UTC) by 79.205.235.209. Redistribution subject to AECE license or copyright. Online distribution is expressly prohibited.]
You might also like
- Secrets of Exhaust and Intake DesignDocument26 pagesSecrets of Exhaust and Intake Designrudey1867% (3)
- Leuckart ReactionDocument3 pagesLeuckart ReactionKybernetikum100% (1)
- Samsung Service Manual CLX-4195 SeriesDocument148 pagesSamsung Service Manual CLX-4195 SeriesceriseNo ratings yet
- Pulse Charge With Single InductorDocument4 pagesPulse Charge With Single Inductorkcarring100% (1)
- The Physics of MusicDocument12 pagesThe Physics of Musicgdarrko100% (1)
- Faraday and It's UsesDocument2 pagesFaraday and It's UsesRahul Janjali100% (1)
- The NitroparaffinsDocument58 pagesThe NitroparaffinsKybernetikum100% (1)
- Samsung CL29K3W Chassis KS3ADocument92 pagesSamsung CL29K3W Chassis KS3AHernan Ortiz EnamoradoNo ratings yet
- Townsend DischargeDocument4 pagesTownsend DischargeRonald Malave100% (1)
- Presentation 1Document27 pagesPresentation 1Amarendra Singh KhangarotNo ratings yet
- Hybrid Tech Eat On Fuel CellDocument13 pagesHybrid Tech Eat On Fuel CellhhojonNo ratings yet
- Trans-Verter R and DDocument38 pagesTrans-Verter R and DnfkNo ratings yet
- Ni Sbrio-9651: Getting Started With The Sbrio-9651 Som Development KitDocument2 pagesNi Sbrio-9651: Getting Started With The Sbrio-9651 Som Development Kitkhin600No ratings yet
- Plasma Capacitor - Sheet 03A v3 12-29-15Document2 pagesPlasma Capacitor - Sheet 03A v3 12-29-15radiocatifea100% (2)
- Technical Guide: Microwave Ovens With InvertersDocument46 pagesTechnical Guide: Microwave Ovens With InvertersKybernetikum100% (1)
- Usneo - A Naturally Effective Deodorant and Antibacterial ActiveDocument8 pagesUsneo - A Naturally Effective Deodorant and Antibacterial ActiveGreciel Egurrola Sanchez100% (1)
- DC Induction HeatingDocument6 pagesDC Induction Heatingnangkarak8201No ratings yet
- Dony WatssDocument49 pagesDony WatssvbugaianNo ratings yet
- Joule Thief TDocument5 pagesJoule Thief TJohn WestfieldNo ratings yet
- Tutorial (Quartz Crystal Resonators and Oscillators) (John R. Vig)Document308 pagesTutorial (Quartz Crystal Resonators and Oscillators) (John R. Vig)Марко Д. СтанковићNo ratings yet
- Deodorant StickDocument4 pagesDeodorant Stickchicikusuma100% (1)
- Terfenol D DatasheetDocument2 pagesTerfenol D DatasheetFirstAid2No ratings yet
- MTLMMMJ/: Illllllllll IHIDocument9 pagesMTLMMMJ/: Illllllllll IHI77nicuNo ratings yet
- Optical Antennas: Palash Bharadwaj, Bradley Deutsch, and Lukas NovotnyDocument46 pagesOptical Antennas: Palash Bharadwaj, Bradley Deutsch, and Lukas NovotnyArmand Girard-NoyerNo ratings yet
- HHHHHHHHHDocument21 pagesHHHHHHHHHjameswovelee7No ratings yet
- Pyramid AcousticsDocument10 pagesPyramid AcousticsAman ShuklaNo ratings yet
- CST Magnetron SimulationDocument4 pagesCST Magnetron SimulationMuhammad Ahtisham AsifNo ratings yet
- Simulation and Experimental Method For Microwave OvenDocument4 pagesSimulation and Experimental Method For Microwave OvenAmador Garcia III100% (1)
- "Servomotor Controlled by PWM": Experiment 6Document2 pages"Servomotor Controlled by PWM": Experiment 6edsonNo ratings yet
- Us 4936961Document8 pagesUs 4936961PratikNo ratings yet
- CST Whitepaper Magnetron CST WebDocument8 pagesCST Whitepaper Magnetron CST WebGiancarloRichardRivadeneyraMirandaNo ratings yet
- A Book On Electroheat by A.C. Metaxas: Worth A LookDocument2 pagesA Book On Electroheat by A.C. Metaxas: Worth A LookHayden Lovett100% (1)
- DESCR Medical 4 MT KESHEDocument21 pagesDESCR Medical 4 MT KESHETruth Press MediaNo ratings yet
- Hydroxy BoostersDocument269 pagesHydroxy Boostersapi-3725726100% (4)
- Site Map Site Search: Neutral Plates - QuestionsDocument2 pagesSite Map Site Search: Neutral Plates - QuestionsChandra NurikoNo ratings yet
- Amplifier Experiment Wiggler - by Science - GOVDocument161 pagesAmplifier Experiment Wiggler - by Science - GOVBrian LopezNo ratings yet
- Solid State Relay Backemf - Recoil Recovery Circuit - AlternativeWorld EnergyDocument2 pagesSolid State Relay Backemf - Recoil Recovery Circuit - AlternativeWorld Energyfsilassie8012No ratings yet
- CO2-ZnO Patch by Heather Bryant - Plasma Health Patches DRAFTDocument7 pagesCO2-ZnO Patch by Heather Bryant - Plasma Health Patches DRAFTMany Hands 4 Peace100% (2)
- March 19, 1968 - R, Kromrey I 3,374,376: Electric GeneratorDocument8 pagesMarch 19, 1968 - R, Kromrey I 3,374,376: Electric GeneratorVlad AdrianNo ratings yet
- FEKO. Get StartedDocument84 pagesFEKO. Get StartedLaz GsodfjxNo ratings yet
- Patent 7 Claims MT KESHE, FREE ENERGYDocument29 pagesPatent 7 Claims MT KESHE, FREE ENERGYTruth Press MediaNo ratings yet
- Kapanadze Patent WO 2008 103129 A1Document11 pagesKapanadze Patent WO 2008 103129 A1armandoaltomare100% (1)
- Geet Reactor RodDocument11 pagesGeet Reactor RodthenjhomebuyerNo ratings yet
- Paul Brown Nuclear Battery Patent 1989Document10 pagesPaul Brown Nuclear Battery Patent 1989mjstrand1No ratings yet
- CST Studio Suite - Getting StartedDocument82 pagesCST Studio Suite - Getting StartedAbdul AzizNo ratings yet
- Parallel Magnetic Path TechnologyDocument16 pagesParallel Magnetic Path TechnologyMohammed FaizanNo ratings yet
- Electronics Symbols PDFDocument8 pagesElectronics Symbols PDFDayanand Gowda KrNo ratings yet
- Magnetron Theory of Operation: Beverly Microwave DivisionDocument12 pagesMagnetron Theory of Operation: Beverly Microwave DivisionAllan BorderNo ratings yet
- The Cathode-Ray TubeDocument4 pagesThe Cathode-Ray TubeJoseGarciaRuizNo ratings yet
- Harris 1997 CatalogDocument264 pagesHarris 1997 CatalogIonuț Dragoș Gid100% (2)
- Nuclear BatteryDocument22 pagesNuclear BatteryPrayag P NairNo ratings yet
- PLama Arc SpeakerDocument6 pagesPLama Arc SpeakerRomina GuadagniniNo ratings yet
- US20140111054A1-Generator Cu Bobine Îmbunătățite Pentru Ai Spori Proprietățile electrodinamice-US20140111054ADocument21 pagesUS20140111054A1-Generator Cu Bobine Îmbunătățite Pentru Ai Spori Proprietățile electrodinamice-US20140111054AbluesurviverNo ratings yet
- Nuclear BatteryDocument20 pagesNuclear Batteryshefinbasheer100% (1)
- Vdo+12 6+manualDocument36 pagesVdo+12 6+manualpetar277034100% (1)
- 1.1 1.2 IntroductionDocument24 pages1.1 1.2 IntroductionbellarosyNo ratings yet
- On Nuclear MicrobatteriesDocument20 pagesOn Nuclear MicrobatteriesVikasmatrey50% (2)
- Microwave Synthesis: A Physical Concept: V.K. Saxena and Usha ChandraDocument21 pagesMicrowave Synthesis: A Physical Concept: V.K. Saxena and Usha ChandraJunior FariasNo ratings yet
- Microwave Generator For Scientific and Medical Applications: V. Surducan, E. Surducan, R. Ciupa and C. NeamtuDocument5 pagesMicrowave Generator For Scientific and Medical Applications: V. Surducan, E. Surducan, R. Ciupa and C. Neamtujax almarNo ratings yet
- Chapter 3 - Microwave EquipmentDocument10 pagesChapter 3 - Microwave EquipmentNstm3No ratings yet
- Microwave GeneratorDocument4 pagesMicrowave Generatorroby72No ratings yet
- Microwave DiathermyDocument2 pagesMicrowave DiathermyAkshat SinghNo ratings yet
- Prabhat Dayal 532/12 - (43) : Wireless Mobile Charging Using MicrowavesDocument15 pagesPrabhat Dayal 532/12 - (43) : Wireless Mobile Charging Using MicrowavesprabhatdayalNo ratings yet
- Magnetron High Power System DesignDocument13 pagesMagnetron High Power System DesignM - G 0111No ratings yet
- Ece 3323 Experiment 1Document11 pagesEce 3323 Experiment 1TANQUERO_WW20% (1)
- Wireless Charging PDFDocument4 pagesWireless Charging PDFAbhi BhatNo ratings yet
- Code KARAT in Simulations of Power Microwave SourcDocument2 pagesCode KARAT in Simulations of Power Microwave SourcGiacomoMiglioreNo ratings yet
- Batt Charging 1 1 FINALDocument0 pagesBatt Charging 1 1 FINALKybernetikumNo ratings yet
- MW Dielectric Superheating Reaction VesselDocument6 pagesMW Dielectric Superheating Reaction VesselKybernetikumNo ratings yet
- Friedel-Crafts Acylation of TolueneDocument6 pagesFriedel-Crafts Acylation of TolueneKybernetikumNo ratings yet
- Pfaudler ChemwareDocument6 pagesPfaudler ChemwareKybernetikumNo ratings yet
- Hershberg StirrerDocument1 pageHershberg StirrerKybernetikumNo ratings yet
- Organo Lithium CompoundsDocument6 pagesOrgano Lithium CompoundsKybernetikumNo ratings yet
- Compact Steam Distillation ApparatusDocument1 pageCompact Steam Distillation ApparatusKybernetikumNo ratings yet
- Low-Cost Constant Temperature Heating BlockDocument3 pagesLow-Cost Constant Temperature Heating BlockKybernetikumNo ratings yet
- Compact Steam Distillation ApparatusDocument1 pageCompact Steam Distillation ApparatusKybernetikumNo ratings yet
- Compact Steam Distillation ApparatusDocument1 pageCompact Steam Distillation ApparatusKybernetikumNo ratings yet
- A Simple Alternative To Separatory Funnels For Chemical ExtractionsDocument1 pageA Simple Alternative To Separatory Funnels For Chemical ExtractionsKybernetikumNo ratings yet
- MW - Nitroalkene Henry ReactionDocument4 pagesMW - Nitroalkene Henry ReactionKybernetikumNo ratings yet
- High Speed Stirring and Flask DesignDocument5 pagesHigh Speed Stirring and Flask DesignKybernetikumNo ratings yet
- Microwave Oven Inverter HV Power SupplyDocument8 pagesMicrowave Oven Inverter HV Power SupplyADe Muslimin MadridistaNo ratings yet
- Inverter Tech MWDocument6 pagesInverter Tech MWKybernetikumNo ratings yet
- PWM Techniques FinalDocument91 pagesPWM Techniques FinalAndrei BiroNo ratings yet
- Triacs For Microwave OvenDocument9 pagesTriacs For Microwave OvenelzytacogelonaNo ratings yet
- SCH2936 SinglePhaseInverter v3-1Document2 pagesSCH2936 SinglePhaseInverter v3-1KybernetikumNo ratings yet
- MW Inverter IC RM6203Document7 pagesMW Inverter IC RM6203KybernetikumNo ratings yet
- Design of A Microcontroller MW Power ControlDocument101 pagesDesign of A Microcontroller MW Power ControlKybernetikum100% (1)
- FullwavedoublerLC PSforMWDocument1 pageFullwavedoublerLC PSforMWKybernetikumNo ratings yet
- The Willgerodt Reaction.11. A Study of Reaction Conditions With None and Other KetonesDocument5 pagesThe Willgerodt Reaction.11. A Study of Reaction Conditions With None and Other KetonesKybernetikum0% (1)
- Aryl Nitro Reduction With Iron Powder or Stannous Chloride With UltrawaveDocument12 pagesAryl Nitro Reduction With Iron Powder or Stannous Chloride With UltrawaveKybernetikumNo ratings yet
- The Willgerodt ReactionDocument18 pagesThe Willgerodt ReactionKybernetikumNo ratings yet
- The Preparation of Some Aryl Methyl KetonesDocument4 pagesThe Preparation of Some Aryl Methyl KetonesKybernetikumNo ratings yet
- The Hofmann Rearrangement Using Household Bleach-Synthesis of 3-NitroanilineDocument1 pageThe Hofmann Rearrangement Using Household Bleach-Synthesis of 3-NitroanilineKybernetikumNo ratings yet
- Acoustical MaterilasDocument34 pagesAcoustical MaterilasMuthuveerappan Chockalingam100% (1)
- What Is Magnetron?Document4 pagesWhat Is Magnetron?Ravi100% (1)
- A Novel Plasma Reactor For CVDDocument5 pagesA Novel Plasma Reactor For CVDyerson fabian barragan jimenezNo ratings yet
- Points of Consideration On Voiceprint AnalysisDocument3 pagesPoints of Consideration On Voiceprint AnalysisJoeban R. Paza0% (1)
- Microwave Engineering Practical FileDocument13 pagesMicrowave Engineering Practical FileMohit Dutta100% (1)
- Influence of The Neck Shape For Helmholtz Resonators. Mercier Et AlDocument13 pagesInfluence of The Neck Shape For Helmholtz Resonators. Mercier Et AlkarelNo ratings yet
- Mwe DC Lab ManualDocument32 pagesMwe DC Lab ManualMadhan ReddyNo ratings yet
- Wireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingDocument6 pagesWireless Charging of Electric Vehicles Using Dual Spiral Coil Magnetic Resonant CouplingIJRASETPublicationsNo ratings yet
- Ch-2 Microwave Propagation and Components: - H. D. ShuklaDocument43 pagesCh-2 Microwave Propagation and Components: - H. D. ShuklaBang Jago100% (1)
- Handbook NewDocument26 pagesHandbook NewthamarairrrNo ratings yet
- 01 1299134310 2255Document90 pages01 1299134310 2255Lee Kar HuoNo ratings yet
- Damped SHM (Qualitative) - Forced Oscillation - Resonance - Helmholtz' ResonatorDocument7 pagesDamped SHM (Qualitative) - Forced Oscillation - Resonance - Helmholtz' ResonatorPrarthana.gNo ratings yet
- Villa-López 2016 Meas. Sci. Technol. 27 025101Document14 pagesVilla-López 2016 Meas. Sci. Technol. 27 025101Vinita ChoudharyNo ratings yet
- A Hermetic On-Cryostat Helium Source For Low Temperature ExperimentsDocument5 pagesA Hermetic On-Cryostat Helium Source For Low Temperature ExperimentsadsdasdassadsadNo ratings yet
- Ring ResonatorDocument48 pagesRing ResonatorShivrajNo ratings yet
- ARV Alien Reproduction Vehicle ConceptDocument2 pagesARV Alien Reproduction Vehicle ConceptNikoletaNo ratings yet
- Altair WhitePaper FEKO CPT Concept-AlexDocument6 pagesAltair WhitePaper FEKO CPT Concept-AlexCầu CaoNo ratings yet
- MCQs in Microwave Communications Part I AnswersDocument3 pagesMCQs in Microwave Communications Part I AnswersRaghu Veer KNo ratings yet
- Characterization and Modeling of Microwave Absorbers in The RF and Antenna ProjectsDocument4 pagesCharacterization and Modeling of Microwave Absorbers in The RF and Antenna ProjectsHa Tran KhiemNo ratings yet
- A Critical Review of Recent Progress in Mid-Range Wireless Power Transfer PDFDocument12 pagesA Critical Review of Recent Progress in Mid-Range Wireless Power Transfer PDFeduardomaimaiNo ratings yet
- Introduction To Microstrip AntennasDocument179 pagesIntroduction To Microstrip AntennasMirela CimpanuNo ratings yet
- AucosticsDocument98 pagesAucosticswendodavidNo ratings yet
- Microwave Lab ManualDocument48 pagesMicrowave Lab ManualAbuzar shakeelNo ratings yet
- An Overview of Dielectric Properties Measuring TecDocument17 pagesAn Overview of Dielectric Properties Measuring TecDoug HawkNo ratings yet
- Quartz Dy NeDocument3 pagesQuartz Dy NeCetelian RahmanNo ratings yet
- Resonant Gas Sensor and Switch Operating in Air With Metal-Organic Frameworks CoatingDocument8 pagesResonant Gas Sensor and Switch Operating in Air With Metal-Organic Frameworks CoatingSiddhanta RoyNo ratings yet