You might also like
- Physics FormulasDocument1 pagePhysics FormulasspinfxNo ratings yet
- Mechanical Vibrations Base Excitation Problem SolvedDocument9 pagesMechanical Vibrations Base Excitation Problem SolvedEx HNo ratings yet
- Vibrations: Second Order Systems - Forced ResponseDocument7 pagesVibrations: Second Order Systems - Forced ResponseCharlie TejNo ratings yet
- Strings and 1D Wave Equation: Important Concepts/AssumptionsDocument17 pagesStrings and 1D Wave Equation: Important Concepts/AssumptionsOnur AkturkNo ratings yet
- Physics formulas and concepts summaryDocument4 pagesPhysics formulas and concepts summaryMagical PangolinNo ratings yet
- Physics G.e.1.1 Unit IIDocument21 pagesPhysics G.e.1.1 Unit IIgyanaranjansahulipu637No ratings yet
- Final PDFDocument13 pagesFinal PDFAlexandre Magno Bernardo FontouraNo ratings yet
- exam2formulaDocument4 pagesexam2formulatapanmukhopadhyay066No ratings yet
- Signals & Systems MCQs - Properties of Fourier TransformsDocument4 pagesSignals & Systems MCQs - Properties of Fourier Transformszohaib100% (1)
- Accelerometer Frequency Response AnalysisDocument4 pagesAccelerometer Frequency Response AnalysisTrung PhanNo ratings yet
- General Physics I Chapter 14 Wave MotionDocument3 pagesGeneral Physics I Chapter 14 Wave Motionnomio12No ratings yet
- Midterm Solutions Phys 255 Sfu Simon Fraser UniversityDocument9 pagesMidterm Solutions Phys 255 Sfu Simon Fraser UniversitypreetsimonNo ratings yet
- Assignment in Advanced Quantum MechanicsDocument2 pagesAssignment in Advanced Quantum MechanicsdivyaNo ratings yet
- Mechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesDocument51 pagesMechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesAbhishek MishraNo ratings yet
- Lecture 17Document21 pagesLecture 17narvan.m31No ratings yet
- MIT8 - 223IAP17 - Lec11 - Forced OscilationsDocument5 pagesMIT8 - 223IAP17 - Lec11 - Forced OscilationsFERNANDO FLORES DE ANDANo ratings yet
- Graphical representations of transverse wavesDocument7 pagesGraphical representations of transverse wavesManas kumarNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Useful formulae guideDocument4 pagesUseful formulae guidejecabuzzNo ratings yet
- HARMONIC MOTIONDocument7 pagesHARMONIC MOTIONYemukelaniNo ratings yet
- F (T) DV DT M B F Du DX E DX: Forces UnidimensionalsDocument3 pagesF (T) DV DT M B F Du DX E DX: Forces UnidimensionalsJosé Luis Reyes CalderónNo ratings yet
- Chapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsDocument92 pagesChapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsRoutine Of Nepal BandaNo ratings yet
- Waves MechanicalDocument81 pagesWaves MechanicalChandrali DasNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Damped HoDocument3 pagesDamped Homani kandanNo ratings yet
- Problem Set1 SolnsDocument3 pagesProblem Set1 SolnsIpsita MandalNo ratings yet
- Exact and Approximate Expressions For The Period of Anharmonic OscillatorsDocument11 pagesExact and Approximate Expressions For The Period of Anharmonic OscillatorsjeremyNo ratings yet
- Damping Harmonic OscillatorsDocument8 pagesDamping Harmonic OscillatorsLuis GarciaNo ratings yet
- SDOF Forced VibrationsDocument15 pagesSDOF Forced VibrationsSachin BharadwajNo ratings yet
- Study of Oscillations with MATLABDocument4 pagesStudy of Oscillations with MATLABPHƯỚC DƯƠNG THANHNo ratings yet
- Computational Fluid Dynamics : February 26Document22 pagesComputational Fluid Dynamics : February 26Tatenda NyabadzaNo ratings yet
- Microwave EngineeringDocument8 pagesMicrowave EngineeringDumindu JayawardeneNo ratings yet
- Chapter 2: Kinematics of Particles: Constrained MotionDocument3 pagesChapter 2: Kinematics of Particles: Constrained MotionRicardo TapiaNo ratings yet
- Chapter 9. Transmission LinesDocument28 pagesChapter 9. Transmission Lines채정우No ratings yet
- Advanced Mathematics Tut 2Document4 pagesAdvanced Mathematics Tut 2hktang1802No ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Introduction To QMDocument3 pagesIntroduction To QMNicholas OwNo ratings yet
- MATH 219: Spring 2021-22Document7 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Some Useful Formulae: A A A A A A + + + +Document3 pagesSome Useful Formulae: A A A A A A + + + +leichihouNo ratings yet
- Mathematical Properties of Geometric Brownian MotionDocument15 pagesMathematical Properties of Geometric Brownian MotionYeti KapitanNo ratings yet
- Hopf Bifurcation For FlowsDocument5 pagesHopf Bifurcation For FlowsKyostaa MNo ratings yet
- Lecture12 2019 Harmonic Potential PDFDocument26 pagesLecture12 2019 Harmonic Potential PDFMatt AllsopNo ratings yet
- PHY431 Slides Waves RevisedVersionBasedOnTribinoNotesDocument32 pagesPHY431 Slides Waves RevisedVersionBasedOnTribinoNotesVira RenaNo ratings yet
- Chapter 9Document28 pagesChapter 9wlsh2001No ratings yet
- SHM SummaryDocument3 pagesSHM SummaryalifikmalNo ratings yet
- Appendix To Lecture 2Document16 pagesAppendix To Lecture 2anik sarkerNo ratings yet
- FTNotesbghh HJDocument12 pagesFTNotesbghh HJPalashNo ratings yet
- AEP 3330 Final - Some EquationsDocument1 pageAEP 3330 Final - Some EquationsJesse ZhangNo ratings yet
- Simple Harmonic Oscillator 1Document10 pagesSimple Harmonic Oscillator 1MD: Rabiul Awal Shuvo100% (1)
- MXCXKXF T: (Sin Cos) +Document9 pagesMXCXKXF T: (Sin Cos) +Dana MNo ratings yet
- SchwartzDocument25 pagesSchwartzAntónio Oliveira100% (1)
- Solutions 3Document7 pagesSolutions 3Max JenkinsonNo ratings yet
- Goldstein 1 2 6 8 14 20Document7 pagesGoldstein 1 2 6 8 14 20Gopal KrishnaNo ratings yet
- Waves and Instabilities in Elastic MediaDocument16 pagesWaves and Instabilities in Elastic Mediaatul206No ratings yet
- Vibration FundamentalsDocument25 pagesVibration FundamentalsManashaaNo ratings yet
- 10 - Bivariate DistributionsDocument10 pages10 - Bivariate DistributionsHarsha SawNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- The Atmosphere: Weather and ClimateDocument13 pagesThe Atmosphere: Weather and ClimateMarisaNo ratings yet
- Share '1-Photelectric EffectDocument43 pagesShare '1-Photelectric EffectẄâQâŗÂlïNo ratings yet
- Physics For Scientists and Engineers 6th Edition Tipler Test BankDocument21 pagesPhysics For Scientists and Engineers 6th Edition Tipler Test Bankgabrielcongk6s0nc100% (27)
- Topic 2: Flowmeter Measurement Apparatus 2.1 THEORY: RotameterDocument6 pagesTopic 2: Flowmeter Measurement Apparatus 2.1 THEORY: Rotameterpelinces_cityNo ratings yet
- Advanced Level Physics 3ed - Nelkon and Parker PDFDocument1,129 pagesAdvanced Level Physics 3ed - Nelkon and Parker PDFjrfisico201195% (22)
- Sway and Roll Motion of A BuoyDocument18 pagesSway and Roll Motion of A BuoyRupesh KumarNo ratings yet
- Test Method for Measurement of Stress in GlassDocument14 pagesTest Method for Measurement of Stress in GlassMatheus TeixeiraNo ratings yet
- Science 8 - Q1 - DW8Document3 pagesScience 8 - Q1 - DW8Argyll PaguibitanNo ratings yet
- Mono-chromatic laser light propertiesDocument3 pagesMono-chromatic laser light propertiesMay Gamal EldinNo ratings yet
- Quantum Mech RVW 2Document29 pagesQuantum Mech RVW 2ravb12-1No ratings yet
- Problem Sheet 3Document2 pagesProblem Sheet 3balochfrahan.2003No ratings yet
- ANTENNA AND MICROWAVE ENGINEERING COURSEDocument65 pagesANTENNA AND MICROWAVE ENGINEERING COURSEMaryam MuneebNo ratings yet
- Department of Education: National Capital Region Quarter 2Document7 pagesDepartment of Education: National Capital Region Quarter 2Princess BermejoNo ratings yet
- MCQ-MW PlanningDocument2 pagesMCQ-MW PlanningMohamed Saber MokdafNo ratings yet
- UP College of Science Physics 71 1st Long Exam ReviewDocument12 pagesUP College of Science Physics 71 1st Long Exam ReviewAb YZNo ratings yet
- Velocity Q & ADocument12 pagesVelocity Q & AkarimNo ratings yet
- Lecture4 - Temperature and HeatDocument36 pagesLecture4 - Temperature and HeatGiovanni PelobilloNo ratings yet
- Interferometric Imaging of Amplitude and Phase of Spatial Biphoton StatesDocument10 pagesInterferometric Imaging of Amplitude and Phase of Spatial Biphoton StatesRafael KiyasuNo ratings yet
- Spectrophotometry FundamentalsDocument15 pagesSpectrophotometry FundamentalschipulinoNo ratings yet
- Physics For Scientists and Engineers Foundations and Connections 1St Edition Katz Solutions Manual Full Chapter PDFDocument67 pagesPhysics For Scientists and Engineers Foundations and Connections 1St Edition Katz Solutions Manual Full Chapter PDFwadeperlid9d98k100% (9)
- EM Waves: Properties, Hertz Experiment & SpectrumDocument8 pagesEM Waves: Properties, Hertz Experiment & SpectrumBablu SinghNo ratings yet
- Radiation Safety Series Lesson 2Document31 pagesRadiation Safety Series Lesson 2Walter Rueda100% (1)
- Discover X-Rays: Roentgen's Accidental Discovery (39Document241 pagesDiscover X-Rays: Roentgen's Accidental Discovery (39shania edictoNo ratings yet
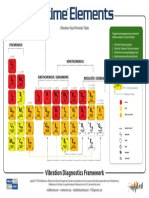
- Vibration Fault Periodic Table: E L M UDocument1 pageVibration Fault Periodic Table: E L M UHaitham Youssef100% (1)
- Chapter 2 Kinematic RevisionDocument7 pagesChapter 2 Kinematic RevisionJohnson116No ratings yet
- PHASICS Brochure Kaleo IRDocument4 pagesPHASICS Brochure Kaleo IRmahmoud khedrNo ratings yet
- Today's Agenda: Review of Waves. Young's Double Slit ExperimentDocument9 pagesToday's Agenda: Review of Waves. Young's Double Slit ExperimentMiv SisNo ratings yet
- January 2022 (IAL) QPDocument28 pagesJanuary 2022 (IAL) QPTahsin AliNo ratings yet
- Polytechnic LebanonDocument5 pagesPolytechnic LebanonIbm4444No ratings yet
- Moment of Inertia - Formulas, MOI of Objects (Solved Examples)Document19 pagesMoment of Inertia - Formulas, MOI of Objects (Solved Examples)Manish Kushwaha100% (1)