You might also like
- Manufacturing Facilities Design & Material Handling: Sixth EditionFrom EverandManufacturing Facilities Design & Material Handling: Sixth EditionNo ratings yet
- Groover Ch7 Numerical ControlDocument65 pagesGroover Ch7 Numerical Controlrony100% (1)
- CH 9 - Discrete Control Using PLC's and PC'sDocument22 pagesCH 9 - Discrete Control Using PLC's and PC'sTehseenakhtarNo ratings yet
- P Grover 1Document33 pagesP Grover 1Annisa Puspa MustikaNo ratings yet
- Ch13Document28 pagesCh13Faiza BadarNo ratings yet
- Manual Assembly LinesDocument55 pagesManual Assembly LinesPraveen P JoseNo ratings yet
- CH 18 Transfer Lines and Similar Automated Manufacturing SystemsDocument28 pagesCH 18 Transfer Lines and Similar Automated Manufacturing SystemsNabeel AhmadNo ratings yet
- Robot Cell DesignDocument18 pagesRobot Cell DesignShione T Mundawarara57% (7)
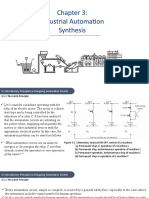
- Chapter3-Industrial Automation SynthesisDocument36 pagesChapter3-Industrial Automation SynthesisThuan HuynhNo ratings yet
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- Lecture 2-2: Robotics Robotics and and Automation AutomationDocument8 pagesLecture 2-2: Robotics Robotics and and Automation Automationharikiran3285No ratings yet
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- Automation Studio ProDocument24 pagesAutomation Studio PronelsonNo ratings yet
- Programming Industrial Automation Laboratory Manual 2021-22Document60 pagesProgramming Industrial Automation Laboratory Manual 2021-22Insane PersonNo ratings yet
- Wireless Automation - ABBDocument16 pagesWireless Automation - ABBajit_ahuja1737No ratings yet
- Cim PDFDocument32 pagesCim PDFVarshaNo ratings yet
- Lecture 2 - (Robotic Control)Document39 pagesLecture 2 - (Robotic Control)ShamaNo ratings yet
- Design of Mechatronics SystemDocument28 pagesDesign of Mechatronics SystemMamo ZelalemNo ratings yet
- Robot Cell DesignDocument25 pagesRobot Cell Designnandkishor joshi100% (1)
- Industrial RoboticsDocument51 pagesIndustrial RoboticsArturs_LVNo ratings yet
- Unit 6 Industrial RoboticsDocument74 pagesUnit 6 Industrial RoboticsMURALIGOCAM_29070605No ratings yet
- Robot Cell Layouts and Interlocks PDFDocument48 pagesRobot Cell Layouts and Interlocks PDFPuru Gaur100% (1)
- Mechanisms and Robotics de Es Zg561: Lecture - 2Document49 pagesMechanisms and Robotics de Es Zg561: Lecture - 2AnkithNo ratings yet
- Field RoboticsDocument70 pagesField RoboticsSkanda SwaroopNo ratings yet
- RObotics and Automation Question Bank AnDocument19 pagesRObotics and Automation Question Bank AnSharmila83No ratings yet
- Industrial Automation 1Document41 pagesIndustrial Automation 1Chandan Chandan100% (2)
- Jeppiaar Engineering College: Question BankDocument15 pagesJeppiaar Engineering College: Question Bankmohanmzcet100% (1)
- De Es ZG561 PDFDocument59 pagesDe Es ZG561 PDFamareshhrNo ratings yet
- Robotics Part3Document87 pagesRobotics Part3Dheeraj RajNo ratings yet
- OIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)Document13 pagesOIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)MICHEL RAJNo ratings yet
- Automation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyDocument30 pagesAutomation & Robotics Robotics: Engr Haider-e-Karar Teaching Assistant Mehran University of Engineering and TechnologyHaider-e-Karar100% (1)
- Mikell P. GrooverDocument15 pagesMikell P. GrooverRizal Nur IkhwaniNo ratings yet
- Automation and Robotics '20Document56 pagesAutomation and Robotics '20Raphael IbrahNo ratings yet
- Robotics ProgrammingDocument32 pagesRobotics ProgrammingRahul HalderNo ratings yet
- Flexible Manufacturing Systems (FMS)Document40 pagesFlexible Manufacturing Systems (FMS)RakeshSaini100% (4)
- Unit 2 Industrial Robotics: Learning ObjectivesDocument42 pagesUnit 2 Industrial Robotics: Learning ObjectivesKontham VivekNo ratings yet
- Lec 2 Robot ManipulatorsDocument14 pagesLec 2 Robot ManipulatorsAjanthan AlagaratnamNo ratings yet
- 2D Pick and Place RobotDocument41 pages2D Pick and Place RobotVikram BogarNo ratings yet
- STS121 M3L3 - Automation and RoboticsDocument8 pagesSTS121 M3L3 - Automation and RoboticsJusteene SaysonNo ratings yet
- Robotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot ProgrammingDocument30 pagesRobotics: Sections: Robot Anatomy Robot Control Systems End Effectors Industrial Robot Applications Robot Programmingmksamy2021No ratings yet
- Review of Collaborative Robot Kuka Baxter Universal Robot Abb FDocument25 pagesReview of Collaborative Robot Kuka Baxter Universal Robot Abb Fశ్రీకాంత్ మడకNo ratings yet
- What Are Some Industrial Robot Basics?Document4 pagesWhat Are Some Industrial Robot Basics?maheswaran muthuNo ratings yet
- Robot Trajectory PlanningDocument15 pagesRobot Trajectory PlanningKoteswara RaoNo ratings yet
- Control Systems in Robotics-ReviewDocument10 pagesControl Systems in Robotics-Reviewroyson316No ratings yet
- Simulation of Robotic ManipulatorsDocument6 pagesSimulation of Robotic ManipulatorstaydomanNo ratings yet
- Robotic Arm Packaging and ParrelitizingDocument12 pagesRobotic Arm Packaging and ParrelitizingAdeel Ahmad WattooNo ratings yet
- Chapter 3 PG MetrologyDocument3 pagesChapter 3 PG MetrologyramptechNo ratings yet
- CH 25 Production Planning and ControlDocument24 pagesCH 25 Production Planning and ControlSaravanan MathiNo ratings yet
- Group TechnologyDocument39 pagesGroup Technologyanon_106272691No ratings yet
- 67047-Ch14 BaruDocument48 pages67047-Ch14 BaruDanielNo ratings yet
- CCCCCCCCCCC C C C C CCCCCCC CCCCCCCCCCCCCCCCCCCP P PDocument21 pagesCCCCCCCCCCC C C C C CCCCCCC CCCCCCCCCCCCCCCCCCCP P PPreethish GuhaNo ratings yet
- Automation in ManufacturingDocument41 pagesAutomation in ManufacturingOmar AhmedNo ratings yet
- M.Tech-Industrial Automation & Robotics (Regulation 2011) : Department of Mechanical EngineeringDocument45 pagesM.Tech-Industrial Automation & Robotics (Regulation 2011) : Department of Mechanical EngineeringRavinder Reddy SimalaNo ratings yet
- Robotics Lab Manual FinalDocument39 pagesRobotics Lab Manual FinalSanthosh100% (4)
- Industrial RoboticsDocument30 pagesIndustrial RoboticsKiran VargheseNo ratings yet
- Inverse Manipulator KinematicsDocument27 pagesInverse Manipulator KinematicsSyifaul L AhmadNo ratings yet
- Power Point Presentation On Robotics and ApplicationsDocument27 pagesPower Point Presentation On Robotics and Applicationsdeepika_164100% (3)
- PLC programmable logic controller A Clear and Concise ReferenceFrom EverandPLC programmable logic controller A Clear and Concise ReferenceNo ratings yet
- Chapter 7 - Industrial RoboticDocument43 pagesChapter 7 - Industrial Roboticardhi bebi laksonoNo ratings yet
- Recent Advances in Robust Control - Novel Approaches and Design MethodsDocument474 pagesRecent Advances in Robust Control - Novel Approaches and Design MethodscemokszNo ratings yet
- Petri Nets - ApplicationsDocument762 pagesPetri Nets - ApplicationscemokszNo ratings yet
- PID Controller Design Approaches - Theory Tuning and Application To Frontier AreasDocument298 pagesPID Controller Design Approaches - Theory Tuning and Application To Frontier AreasSchreiber_Dieses100% (2)
- Fuzzy SystemsDocument226 pagesFuzzy SystemsZelalem GirmaNo ratings yet
- Model Predictive ControlDocument312 pagesModel Predictive ControlSyamsul Rizal Abd ShukorNo ratings yet
- Fuzzy Inference System - Theory and ApplicationsDocument518 pagesFuzzy Inference System - Theory and ApplicationsSchreiber_DiesesNo ratings yet
- Fuzzy Logic - Controls Concepts Theories and ApplicationsDocument428 pagesFuzzy Logic - Controls Concepts Theories and ApplicationsSchreiber_Dieses100% (3)
- Modeling Simulation and System Engineering Lecture PDFDocument40 pagesModeling Simulation and System Engineering Lecture PDFcemokszNo ratings yet
- Electric Machines and DrivesDocument274 pagesElectric Machines and Drivesachut01100% (1)
- Frontiers of Model Predictive ControlDocument168 pagesFrontiers of Model Predictive ControlcemokszNo ratings yet
- Automotive Transmission - Lecture Notes Complete PDFDocument156 pagesAutomotive Transmission - Lecture Notes Complete PDFcemokszNo ratings yet
- Engineering Mechanics Dynami̇cs PDFDocument746 pagesEngineering Mechanics Dynami̇cs PDFcemoksz92% (12)
- Worm Gear PDFDocument15 pagesWorm Gear PDFcemoksz100% (6)
- Industrial Robotics Theory Modelling and ControlDocument964 pagesIndustrial Robotics Theory Modelling and Controlusmani.yusuf75% (4)
- Robotics Unit-4 RBTDocument60 pagesRobotics Unit-4 RBTRagava TalluriNo ratings yet
- Company Profile RACER 2020v1.1Document32 pagesCompany Profile RACER 2020v1.1Ikfi KiaNo ratings yet
- Ethical Issue in The Movie "I, Robot"Document2 pagesEthical Issue in The Movie "I, Robot"jqNo ratings yet
- GF - Robot Legions v2.12Document3 pagesGF - Robot Legions v2.12Tom MuscoNo ratings yet
- 3hac032140 004Document2 pages3hac032140 004zuda.ahamdNo ratings yet
- Muir Patrick 1988 1Document362 pagesMuir Patrick 1988 1hamza malikNo ratings yet
- Group Members: Aryan Thatera Harshill Jain Krutarth Patel Vidit MehtaDocument16 pagesGroup Members: Aryan Thatera Harshill Jain Krutarth Patel Vidit MehtaKrutarth PatelNo ratings yet
- Magnetic CraneDocument45 pagesMagnetic Cranejaiminvarma100% (4)
- 0 - ... Synopsis of Application of Robotics in Garment Industry (Pooja, Saurabh, Shipra, Shudhansu) .....Document4 pages0 - ... Synopsis of Application of Robotics in Garment Industry (Pooja, Saurabh, Shipra, Shudhansu) .....Reena VermaNo ratings yet
- Mini Project SynophsisDocument3 pagesMini Project SynophsisPawanNo ratings yet
- From AI To Robotics. Mobile, Social and Sentient Robots (PDFDrive)Document406 pagesFrom AI To Robotics. Mobile, Social and Sentient Robots (PDFDrive)attayyabkhanNo ratings yet
- SteppersDocument3 pagesSteppersdanyNo ratings yet
- Artificial IntelligenceDocument1 pageArtificial IntelligenceRajat SharmaNo ratings yet
- Dyson To Start Making Household Robots b1 b2Document8 pagesDyson To Start Making Household Robots b1 b2Eduard OsadchyNo ratings yet
- Chapter 5 - Lecture Notes (Kinematics) - Part1Document35 pagesChapter 5 - Lecture Notes (Kinematics) - Part1akash kahsyapNo ratings yet
- 106 Zig-Bee Based Pick & Place RobotDocument3 pages106 Zig-Bee Based Pick & Place Robotprabha upalaNo ratings yet
- Robots in Movies and TelevisionDocument10 pagesRobots in Movies and TelevisionAlexandra LovellNo ratings yet
- When Technology and Humanity Cross: Reymalyn G. CasasolaDocument7 pagesWhen Technology and Humanity Cross: Reymalyn G. CasasolaDavid Pabon100% (4)
- 102 TestDocument4 pages102 Testمحمد ٦No ratings yet
- Chapter 04Document3 pagesChapter 04Julian VerdinezNo ratings yet
- Etat de L'art Thèse Hexapod InspectionDocument43 pagesEtat de L'art Thèse Hexapod InspectionGuillaume Morin DuponchelleNo ratings yet
- Droid Manufacturing Plant: (4) Two Strange Battledroids Argue Over What To DoDocument5 pagesDroid Manufacturing Plant: (4) Two Strange Battledroids Argue Over What To DoDrraaghNo ratings yet
- AVLib A Simulink Library For Multi-Agent Systems ResearchDocument7 pagesAVLib A Simulink Library For Multi-Agent Systems ResearchShafayat AbrarNo ratings yet
- Ece2008 Robotics-And-Automation Eth 2.0 40 Ece2008Document2 pagesEce2008 Robotics-And-Automation Eth 2.0 40 Ece2008Raj GaneshNo ratings yet
- Automated Seam Tracking System Based On Passive Monocular Vision For Automated Linear Robotic Welding ProcessDocument3 pagesAutomated Seam Tracking System Based On Passive Monocular Vision For Automated Linear Robotic Welding ProcessMihail AvramovNo ratings yet
- ABB Safety Instruction 3HAC027098-001 Revb enDocument24 pagesABB Safety Instruction 3HAC027098-001 Revb enPraphullNo ratings yet
- Chapter 2 SolutionDocument4 pagesChapter 2 SolutionEngr ShabirNo ratings yet
- The Article: More Free Lessons at 2Document8 pagesThe Article: More Free Lessons at 2Sonia Del Val CasasNo ratings yet
- BioGecko - A Review On Recent Studies On Concrete 3D Printer Issues and RecommendationsDocument11 pagesBioGecko - A Review On Recent Studies On Concrete 3D Printer Issues and RecommendationsSam SalahNo ratings yet
- Frontiers of AI: CS158-2: Introduction To Artificial Intelligence 4 Term AY 2019-2020Document19 pagesFrontiers of AI: CS158-2: Introduction To Artificial Intelligence 4 Term AY 2019-2020Cj De las AlasNo ratings yet