INANE AAA
. ‘USOOSIBIIBIA,
United States Patent 119 {1]) Patent Number: 5,181,181
Glynn [45] Date of Patent: Jan. 19, 1993
{S4] COMPUTER APPARATUS INPUT DEVICE 4,754,268 6/1988 Mori 340/710
FOR THREE-DIMENSIONAL Seeks Sei Ono el al nnn. Moros
INFORMATION $787051 11/1988 Olson ease
Agin9 |3/1989 Boine oa 30709
[75] Inventor: Brian J. Glynn, Merrit Island, Fl 835508 5/1989. Fimchbmagh "occ M0708
, Ses9a38 6/1980 Lapiche eta 304770811
173] Assignee: Triton Technologies, Inc. Burke, Va ues hastens ieee eal aa
1] Appl. Now 588, iSt6680 4/1990 Okawe nnn 364/058 X
Bt) App coe 4,922,444 5/1990 Baba vs 364/566,
[22] Filed: Sep, 27, 1990 SeoieeT 3/198). Rapijto eal ares}
(1) Im. a GOIP 7/00, GO1P 15/00; Primary Examiner—~Thomas G. Black
GO9G 1/0 Assistant Examiner—Michael Zanelli
364/866; 340/710; “Atiomey, Agent, or Firm—Burns, Dosne, Swecker &
364/709.11 Mathis
[2] Us.a.
[58] Field of Search sn, 364/560, 453, 708.11,
364/565, $66; 340/710, 706; 178/18-20; 73/508 71 aeeeeel
‘A mouse which senses six degrees of motion arising
ba Rsteresces Cited from movement of the mouse within three dimensions.
US. PATENT DOCUMENTS Avhandsheld device includes three accelerometers for
sensing linear translation along three axes of a Cartesian
3841541 11/1970 Engelbart maiex ng
sities Roker WOnis coordinate system and three angular rate sensors for
31892963 7/1075 Hawley el 3so7231.16 sensing angular rotation about the three axes. Signals
BE9RAAS 6/1975 MacLeod et. 356/isi produced by the sensors are processed to permit the
53987685 1071975 Opocensky 340/710 acceleration, velocity and relative position and attitude
‘£241,408 12/1980. Noit 30/105 of the device to be conveyed to a computer. Thus, 8
4300873 "6/1983 Kisch 340/710 person may interact with a computer with six degrees of
14408478 10/1983. Sprague ct a 331M motion int Sey compe tad
‘motion in three-dimensional space. Computer interface
3/1986 Baker et al 320/710
eee Soares'e ORS and unique adéres denieation ensure proper
a eared 364/453X Communication with the computer regardless of the
S987 Davison Soros ofientation of the mouse.
8/1987 Taniguti eta. 364/560
9/1987. Shinn 340/707 21 Claims, 7 Drawing Sheets
U.S. Patent Jan. 19, 1993 Sheet 1 of 7 5,181,181
FIG. 1(b) FIG. 1(¢)
US. Patent Jan, 19, 1993 Sheet 2 of 7 5,181,181
FIG. 2(b) FIG, 2c)
Sheet 3 of 7 5,181,181
Jan, 19, 1993
US. Patent
eo
H [0] i
i wee}
: [oo] :
i woe i
‘ [od ‘
' arr :
wainanooe—__
a Guysse001g 6. zit
aes esa) : an com 7<+{ watanous1z00v Ii
+ | “voneuBony +
z {| vou aopeaeaay TL BSESROURTBOOY 1
a 1 | ‘Buypssoord la ali
i ; mas ‘ i!
oe ten WaISNOUTIIOOV :
: ror i
: [-eweooues | nan necmenmae! Li7 — Woneouery soy x 15
: |. [i
: Zu
jevue-sw ware joan V2):
f oy ‘WOSNSS SVE "
[as ali
: WOSN3S 31VE I:
: eeu 0 i
a eo Th n7 Women) sy x | |
‘ z(_ i
Sheet 4 of 7 5,181,181
Jan, 19, 1993
U.S. Patent
; Mowen: qwewe3,
£ | pmoarera JY) surseooia
sem
ca
U.S. Patent Jan, 19, 1993 Sheet 5 of 7 5,181,181
Formatted
30 Motion and
Position Data
*Velochy
sition
santtude
‘30 Motion and
Postion Data
Tastantaneous
30 Information
FIG. 5
FIG. 6
US. Patent Jan, 19, 1993 Sheet 6 of 7 5,181,181
Tilia
Conditions
Reset
oF Hold
Conditions,
‘Attitude and
Velocity and Position
Vectors:
3D Motion and
Position Data
FIG. 7
zs
Vas
Res
y
-T-! 5 s
Origin Pp
xs
FIG. 8
5,181,181
US. Patent Jan, 19, 1993 Sheet 7 of 7
Woman].
Operator |” “Button Pushes =
and Releases "74,
Pusn *. od
‘Button
4 Status
",, Detection
Address
Reset *,
or Hold
Conditions,
al 30 Motion and
Position Date ° atitude
Posnion
Data
‘30 Motion and
Position Data
FIG. 10
5,181,181
1
COMPUTER APPARATUS INPUT DEVICE FOR
‘THREE-DIMENSIONAL INFORMATION
BACKGROUND OF THE INVENTION
‘The present invention relates to @ computer periph-
eral input device used by an operator 10 control cursor
position or the like. More particularly, the invention is
Sirected to an apparatus and method for inputting posi-
tion, attitude and motion data to a computer in, for
‘example, terms of three-dimensional spatial coordinates
‘over time,
‘Most computer systems with which humans must
interact, include a ‘cursor" which indicates current posi-
tion on a computer display. The cursor position may
indicate where data may be input, such as the case of
textual information, or where one may manipulate an
abject which is represented graphically by the com-
puter and depicted on a display. Manipulation of the
cursor on a computer display may also be used by an
‘operator to select or change modes of computer opera-
tion,
Early means of cursor control were centered around
the use of position control keys on the computer key-
board. These control keys were later augmented by
‘other devices such as the light pen, graphics tablet,
Joystick, and the track ball. Other developments utilized
' device called a ‘mouse’ 10 allow an operator to di-
rectly manipulate the cursor position by moving a small,
hand-held device across a flat surface.
‘The first embodiment of the mouse detected rotation
‘ofa ball which protrudes from the bottom of the device
to control cursor position. As the operator moves the
‘mouse on a two dimensional surface, sensors in the
mouse detect rotation of the ball along two mutually
perpendicular axes. Examples of such devices are illus-
trated in U.S. Pat. Nos. 3,541,541; 3,835,464; 3,892,963;
3,987,685; and 4,390,873. US. Pat. No. 4,409,479 dis-
closes a further development which utilizes optical
sensing techniques to detect mouse motion without
moving parts
These mouse devices all detect and convey motion
within two dimensions. However, with the increased
use of computers in the definition, representation, and
manipulation of information in terms of three-dimen-
sional space, attempts have been made to devise tech-
niques that allow for the definition of positional coordi-
nates in three dimensions. Advances of computer
‘graphical display and software technology in the area of
three-dimensional representation of information has
‘made desirable the capability of an operator to input
and manipulate or control more than merely three-di-
mensional position information, but also three-dimen-
sional motion and attitude information. This is particu-
larly true in the case of modeling, simulation, and ani-
mation of objects that are represented in either two or
three-dimensional space.
USS. Pat. No. 3,898,445, issued to MacLeod et al
relates to a means for determining position ofa target
three dimensions by measuring the time it takes for a
number of light beams to sweep between reference
points and comparing that with the time required for
the beams to sweep between the reference points and
the target.
USS. Pat. No. 4,766,423, issued to Ono et al, and US.
Pat, No, 4,812,828, issued to Ebina et a, disclose dis-
play and control devices and methods for controlling a
‘cursor in a three-dimensional space by moving the cur
5
10
s
30
«
ss
«
6s
2
sor as if to maneuver it by use of joystick and throttle
type devices to alter the direction and velocity of @
USS. Pat. No. 4,835,528, issued to Flinchbaugh, illus-
trates a cursor control system which utilizes movement
of a mouse device upon a two-dimensional surface that
contains logically defined regions within which move-
‘ment of the mouse is interpreted by the system to mean
‘movement in three-dimensional space.
‘None of the three-dimensional input devices noted
above has the intuitive simplicity that a mouse has for
interacting in two dimensions. A three-dimensional
input device disclosed in U.S. Pat. No. 4,787,081 to
Olson utilizes inertial acceleration sensors to permit an
operator to input three-dimensional spatial position.
However, the disclosed device does not consider input
of either motion or ‘orientation’, henceforth referred 10
herein as ‘attitude’
To determine changes in position within a plane, the
‘Olson system senses translation from a first accelerome~
ter. Rotation is obtained from the difference in transla-
tional acceleration sensed by the first accelerometer and
1 second accelerometer. This technique mandates preci-
sion mounting of the accelerometer pair, as well as
processing to decouple translation from rotation and to
determine both the rotational axis and rate. Thus, the
device disclosed by Olson et al. requires extensive pro-
‘cessing by the computer which may render the device
incompatible with lower end computing devices. Addi-
tionally, this technique would require highly sensitive
accelerometers to obtain low rotational rates.
In the Olson device, analog integrator circuits are
used for the first stage of integration required to obtain
displacement from acceleration. These integrator cit~
cous have limits in dynamic range and require periodic
resets to zero to eliminate inherent errors of offset and,
drift. The Olson device also constrains the use of the
remote device to a limited range of orientation with
respect to the computer in order to permit proper com-
‘munication. Furthermore, no provision is made in the
‘Olson system to prevent interference from signals origi-
nating from nearby input devices which control nearby
computer work stations.
Accordingly, one of the objects of the present inven-
tion is to provide a new and improved device that over~
‘comes the aforementioned shortcomings of previous
computer input techniques.
‘Additionally, a primary object of the present inven-
tion is to provide a means for an operator to input to a
‘computer information which allows the computer 10
directly ascertain position, motion and attitude of the
input device in terms of three-dimensional spatial coor-
dinates,
It is another object of the present invention to pro-
vvide a new and improved apparatus and method for
controlling movement of a cursor, represented on a
‘computer display in terms of three-dimensional spatial
coordinates.
Tt is yet another object of the present invention to
provide an apparatus and method for providing input to
‘computer, postion, motion, and attitude with a device
which is intuitively simple to operate by the natural
motion of a person, for the purpose of conveying a
‘change in position or attitude, in a particular case, oF a
‘change in the state of variables, in the general case.
5,181,181
3
SUMMARY OF THE INVENTION
In accordance with one embodiment of the present
invention, a computer input device apparatus detects
and conveys to a computer device positional informa:
tion within six degrees of motion—linear translation
along, and angular rotation about, each of three mutt
ally perpendicular axes of a Cartesian coordinate s95-
tem. The preferred embodiment of the present inven-
tion includes three accelerometers, each mounted with
its primary axis oriented to one of three orthogonally
oriented, or mutually perpendicular, axes. In this way,
tach accelerometer independently detects translational
Acceleration slong one ofthe primary axes ofa three-i
mensional Cartesian coordinate system. Each acceler
Cometer produces a signal which is directly proportional
to the acceleration imparted along its respective pri
mary axis,
‘Additionally, the preferred embodiment includes
three orthogonally oriented rate sensors, each mounted
insuch a way that each primary axisis parallel or collin
early oriented with each of the respective aforemen-
tioned accelerometer primary axes. Each rate sensor
independently detects angular rotational rates about an
individual axis of the Cartesian coordinate system and
produces a signal which is dizectly proportional to the
Angular momentum, or angular rotational displacement
rate, which is detected as the rate Sensor rotates about
its respective primary aris.
‘Additional aspects of the preferred embodiment of
the present invention include techniques for producing,
velocity and position vectors of the imput device. These
Vectors, each consisting of a scalar magnitude and a
direction in terms of a three-dimensional Cartesian co-
ordinate system, are continually updated to reflect the
instantaneous input device velocity as well as its post
tion and attitude, relative to an arbitrary stationary
initial position and attitude
‘The velocity vector is determined from the geomet-
ric sum ofthe acceleration integrated once overtime, as
indicated by signals produced by the three accelerome-
ters, The velocity vector may be expressed in terms of
4 velocity at which the input device is moving and a
direction of motion. The direction of motion can be
defined by two angles indicating the direction the de-
vice is moving relative to the input device coordinate
system.
The relative position vector is determined from the
seometric sum of the accelerations integrated twice
‘Overtime, as indicated by signals produced by the three
Accelerometers. The relative position vector may be
cexpresied in terms of a linear displacement from the
arbitrary inital origin “zero coordinates‘ of the input
device and a direction, defined by two angles, indicat
{ng the position ofthe device relative tothe initial pos
tion.
“The relative attitude may be determined from the rate
of change in rotational displacements integrated once
‘Overtime as indicated by signals produced by the three
rate sensors. The relative altitude is expressed in terms
of angular displacements from the arbitrary inital a
tude ‘zero angles, normalized to « maximum rotation of
360° Qa radians) about each of the three anes of the
input deviee, indicating the attude of the device rela-
tive to the intial atitude.
"Additional aspects of the preferred embodiment of
the present invention include push-button switches on
the input device which may be actuated by the operator
2s
8
©
4s
©
‘s
4
to convey to a computer a desire to change an operating.
state. Examples of operating state changes include pro-
viding a new input device initial position or attitude, or
indicating a new computer cursor position, or changing
a mode of operation of the computer and/or the input
device.
‘Additional aspects of the preferred embodiment of
the present invention include a wireless interface be-
‘tween the input device and a computer. The wireless
interface permits attributes of the input device motion
and push-button actuation to be communicated to a
‘computer in a manner that allows for motion to be
unencumbered by an attached cable. Preferably, the
interface is bi-directional, allowing the computer 0
control certain aspects of the input device operational
states. In an additional embodiment of the input device,
the interface between the device and a computer may be
acable.
BRIEF DESCRIPTION OF THE DRAWINGS
‘The aforementioned and other objects, features, and
advantages of the present invention will be apparent t0
the skilled artisan from the following detailed descrip-
tion when read in light of the accompanying drawings,
wherein:
FIG. 1(2) isa top view of an input device in accor-
dance with the present invention;
FIG. 1(6) isa front view of the input device of FIG.
3@;
FIG. 1(¢) is a side view of the input device of FIG.
3@);
FIG. 1(¢) isa perspective view of the input device of
FIG. 10},
FIGS. 2(@)-2(c) are cut-away top, front and side
views, respectively, of the device of FIG. 1, illustrating
the motion sensing assembly and ancillary components
area of the input device;
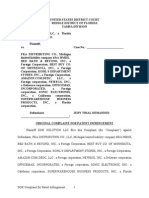
FIG. 3 is a block diagram of the major functional
lements of the preferred embodiment of the present
invention, including a wireless interface to a computer;
FIG. 4'is a block diagram showing additional detail
‘on major processing elements of the preferred embodi-
‘ment of the present invention;
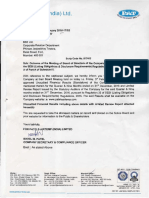
FIG. 5 isa process flow diagram illustrating the func
tions used by the preferred embodiment in processing.
input device motion, push-button status and external
computer interface
FIG. 6 is a process flow diagram illustrating motion
sensing assembly interface functions, and further illus-
trating details of the sensor interface and data conver-
sion process of FIG. 5;
FIG. 7 is a process flow diagram showing velocity
and position calculation functions, and illustrating fur-
ther details of the three-dimensional computation pro-
cess of FIG. 5;
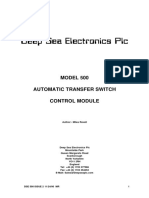
FIG. 8 depicts a tangential velocity arising from rota-
tion of the input device;
FIG. 9 depicts translation and rotation from initial
coordinates of a coordinate system centered on the
input device; and
FIG. 10 is a process flow diagram illustrating the
functions used in processing changes in status of push-
buttons, and in providing external interface to a com-
puter, and illustrating further details of the external
interface process of FIG. 5.
5,181,181
5
DETAILED DESCRIPTION OF THE
‘PREFERRED EMBODIMENT
Referring to FIGS. (2) through 1(¢), « hand-held
‘computer input device or ‘mouse’ 1 is illustrated which
includes a plurality of interface ports 7-12. As shown,
‘each external face of the mouse 1 is provided with an
interface port. Each of these interface ports may pro-
vide communication with the computer through known
wireless communication techniques, such as infrared or
radio techniques. Thus, regardless of the orientation of
the mouse 1 with respect 10 the computer work station,
at least one interface port will be directed generally at
the computer.
‘During operation, the interface ports are operated
simultaneously to transmit or receive signals. Since at
least one of the interface ports generally faces the com-
puter at all times, communication with the computer is
permitted regardiess ofthe orientation of the mouse. As
‘Will be described below in greater detail, the system
‘may include apparatus for avoiding interference from
nearby devices when operated in a relatively crowded
environment, Alternatively, communication with the
‘computer may be established through an interface cable
13,
‘The mouse 1 may also include a plurality of push-but-
tons 4, and 6 for additional interaction of the operator
‘with the host computer system. The push-buttons may
be used, for example, to provide special command sig-
nals to the computer. These command signals are trans-
mitted through the interface ports 7-12 or the cable
interface 13, to the computer.
Preferably, the push-buttons are positioned on an
angled surface of the mouse 1 to allow easy actuation by
‘an operator from at least two different orientations of
the mouse device. Alternatively, multiple sets of push-
‘buttons may be provided to permit easy actuation. Indi
vvidusl push-button sets may be arranged, for example,
‘on opposed faces of the mouse 1 and connected in paral-
Jel to permit actuation of command signals from any one
‘of the multiple push-button sets. Additionally, push-but-
tons which detect and convey a range of pressure ap-
plied to them, as opposed to merely conveying a change
between two states, may be provided in an alternative
embodiment.
‘The push-buttons can be operated to perform a num-
ber of functions. For example, actuation of a push-but-
ton may command the system to reset the zero refer
tence point from which the relative position and attitude
fof the mouse 1 is measured. Additionally, the position
‘and attitude attributes of the mouse I may be held con-
stant, despite movement, while a push-button is de-
pressed. The push-buttons may also function to indicate
8 desire by the operator to indicate a point, Hine, surface,
volume or motion in space, or to select a menu item,
ccursor position or particular attitude.
‘Numerous other examples of the function of push-
buttons 4, §, and 6 could be given, and although no
additional examples are noted here, additional functions
Of the push-buttons will be apparent to the skilled srti-
san, Furthermore, additional embodiments of the mouse
I may include more or fewer than three push-buttons. A
‘motion sensing assembly 2 and an ancillary components
area 3 are indicated by phantom dashed lines in FIGS.
1(@)-1(c). In an alternative embodiment of the present
invention, components included in the ancillary compo-
rents area 3, as described herein, may be contained
Within a separate chassis remote from the mouse 1. In
0
2s
38
“0
45
ss
©
6
such an embodiment, the mouse 1 would contain only
the motion sensing assembly 2.
‘Turning now to FIGS. 2(2)-2(0), the motion sensing.
assembly 2 includes conventional rotational rate sensors
14, 15 and 16, and accelerometers 17, 18 and 19 aligned
fn three orthogonal axes. Rotational rate sensor 14 and
accelerometer 17 are aligned on a first axis; rotational
rate sensor 15 and accelerometer 18 are aligned on @
second axis perpendicular to the first axis; and rotational
Tate sensor 16 and accelerometer 19 are aligned on @
third axis perpendicular to both the first axis and the
second axis,
‘By mounting the rotational rate sensors 14, 15 and 16
and the accelerometers 11, 18 and 19 in the foregoing,
manner, the motion sensing assembly 2 simultaneously
‘senses all six degrees of motion of the translation along,
and rotation about, three mutually perpendicular axes
of a Cartesian coordinate system. Translational acceler-
ations are sensed by the accelerometers 17, 18 and 19,
‘which detect acceleration along the X, Y and Z axes,
respectively, and produce an analog signal representa-
tive of the acceleration. Similarly, rotational angular
rates are detected by the rotational rate sensors 14, 15
‘and 16, which sense rotational rates about the X, Y and
Zaxes, respectively, and produce an analog signal rep-
resentative of the rotational rate.
‘The motion sensing assembly 2 is referred to numer-
cous times below. For simplification, the general term
‘sensors’ shall be used herein to describe the motion
sensing assembly 2 or its individual components de-
scribed above.
FIG. 3s system block diagram which depicts major
functional elements included in the motion sensing as-
sembly 2 and ancillary components area 3 of the mouse
of FIG. 1, and the wireless interface 21 between the
mouse transceivers 7-12 and a transceiver 22 associated
‘with a computer 23, Sensor signals from the individual
‘components of the motion sensing assembly 2 are pro-
Vided to circuits in the ancillary components area 3
‘which performs processing of the sensor signals. Infor-
‘mation regarding the sensor signals is then provided to
‘mouse transceivers 7-12 for communication to the com-
‘puter transceiver 22. Functions performed within the
Ancillary components area 3, labeled analog to digital
signal processing, numeric integration, and vector pro-
cessing, will be further described below.
FIG. 4 is a block diagram of the preferred embodi-
‘ment of the mouse 1 of FIG. 1. Sensor interface circuits
31 provides electrical power to the components of the
‘motion sensing assembly 2 and bias and control circuits
to ensure proper operation of the sensor components.
‘Additionally, sensor interface circuits 31 preferably
include amplification circuitry for amplifying sensor
signals from the motion sensing assembly 2.
"Amplified sensor signals are provided to analog-to-
digital converter 32 which converts the amplified ana-
log sensor signals into corresponding quantized digital
signals. The analog-to-digital converter 32 preferably
includes a single channel which multiplexes sequentially
through the respective sensor signals. Alternatively, the
analog-to-digital converter may include six channels,
‘with individual channels dedicated to individual sensor
signals,
"The digitized sensor signals from the analog-to-digi-
tal converter 32 are stored in a firstin-first-out (FIFO)
buffer memory 33 for further processing by processing
element 34. The FIFO buffer memory 33 is preferably
organized as a single memory stack into which each of
5,181,181
7
the respective digitized sensor signals is stored in se-
‘quential order, The FIFO buffer memory 33 may alter-
natively be organized with six separate memory areas
‘corresponding to the six sensor signals. In other words,
2 separate FIFO stack is provided for digitized sensor
signals from each of the six motion sensing components
of the motion sensing assembly 2. By providing the
FIFO buffer memory 33, the mouse 1 compensates for
‘varying processing speeds in processing element 34 and,
eliminates the need for elaborate synchronization
schemes controlling the operation between the ‘front-
tend’ sensor interface 31 and analog-to-digital converter
‘32, and the ‘backend’ processing element 34 and com-
puter interface control 36.
‘The processing element 34 is preferably a conven:
tional microprocessor having a suitably programmed
read-only memory. The processing element 34 may also
bbe a suitably programmed conventional digital signal
processor. Briefly, the processing element 34 periodi-
cally reads and numerically integrates the digitized
sensor signals ftom the FIFO buffer memory 33. Three-
dimensional motion, position and attitude values are
continually computed in a known manner based on the
‘most recent results of the numerical integration of the
sensor data, the current zero position and attitude infor-
‘mation, and the current processing configuration estab-
lished by push-button or computer commands, Informa-
tion processed by the processing element 34 is stored in
dual-ported memory 38 upon completion of processing,
by known techniques such as direct memory access.
This information may then be sent via interface ports
7-12 to the computer by a computer interface control
36.
‘Numerical integration is performed continvally on
the digital acceleration and rate values provided by the
sensors, Numeric integration of digital values allows for
a significant dynamic range which is limited only by the
amount of memory and processing time allocated to the
task. In addition to numerical integration, the process-
ing element 34 computes and applies correction values
which compensate for the effects of gravity and the
translational effects of rotation on the linear sensors, ie
both gravitational accelerations and tangential veloci-
ties. Additionally, by establishing. a threshold level for
motion signals above which the signals are attributable
to operator movements of the mouse 1, the processing.
element 34 effectively reduces or eliminates errors
‘which might be induced by sensor drift, earth rotational
effects and low level noise signals that may be present
when an operator is not moving the mouse.
‘The processing element 34 responds to external com-
mands by changing the processing configuration of the
calculation processes. For example, in one processing,
mode the sensor value for any axis, or axes, will be
ignored upon computation of the three-dimensional
motion and position values. These external commands
‘would normally be initiated by an operator actuating.
cone of the three push-button switches 4, 5, or 6. The
‘computer interface control 36 detects actuation of the
ppush-buttons 4-6 and sends corresponding command
data to the computer. Upon receipt of the command
data, the computer retums command data to the com-
puter interface control 36 which, in turn, provides com-
‘mand data to the processing element 34 to change the
processing configuration. Another external command
initiated from the push-buttons may result in the pro-
cessing element 34 clearing all numeric integration ac-
cumulators and setting initial condition registers 10
»
2s
0
38
0
45
55
6s
8
zero, thereby causing future position and attitude com-
pputations to be relative to a new physical location and
attitude of the mouse
Utilization of the dual-ported memory 38 permits the
‘external computer to be provided position updates in
near real-time, since the processing element 34 is pro-
vided concurrent access to the memory. In this manner,
the processing element 34 may make the current posi
tion, attitude and motion values available to the external
computer as soon as new computations are completed.
Since current relative position, attitude and motion are
continually computed, as opposed to being computed
‘upon request, this approach ensures that the most recent
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Mechanics of Materials 7th Edition Beer Johnson Chapter 6Document134 pagesMechanics of Materials 7th Edition Beer Johnson Chapter 6Riston Smith95% (96)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Astm C119-16Document8 pagesAstm C119-16Manuel Antonio Santos Vargas100% (2)
- Like Kind Card Game (US Patent 6193235)Document12 pagesLike Kind Card Game (US Patent 6193235)PriorSmartNo ratings yet
- Multicasting Method and Apparatus (US Patent 6434622)Document46 pagesMulticasting Method and Apparatus (US Patent 6434622)PriorSmartNo ratings yet
- Like Kind Money Board Table Game (US Patent 6186505)Document11 pagesLike Kind Money Board Table Game (US Patent 6186505)PriorSmartNo ratings yet
- Intelligent User Interface Including A Touch Sensor Device (US Patent 8288952)Document9 pagesIntelligent User Interface Including A Touch Sensor Device (US Patent 8288952)PriorSmartNo ratings yet
- Cell Regulatory Genes, Encoded Products, and Uses Related Thereto (US Patent 7030227)Document129 pagesCell Regulatory Genes, Encoded Products, and Uses Related Thereto (US Patent 7030227)PriorSmartNo ratings yet
- Method and Apparatus For Retrieving Data From A Network Using Linked Location Identifiers (US Patent 6226655)Document22 pagesMethod and Apparatus For Retrieving Data From A Network Using Linked Location Identifiers (US Patent 6226655)PriorSmartNo ratings yet
- User Interface With Proximity Sensing (US Patent 8035623)Document15 pagesUser Interface With Proximity Sensing (US Patent 8035623)PriorSmartNo ratings yet
- Wine Cellar Alarm System (US Patent 8710985)Document11 pagesWine Cellar Alarm System (US Patent 8710985)PriorSmartNo ratings yet
- Advance Products & Systems v. CCI Piping SystemsDocument5 pagesAdvance Products & Systems v. CCI Piping SystemsPriorSmartNo ratings yet
- Casing Spacer (US Patent 6736166)Document10 pagesCasing Spacer (US Patent 6736166)PriorSmartNo ratings yet
- High-Speed Serial Linking Device With De-Emphasis Function and The Method Thereof (US Patent 7313187)Document10 pagesHigh-Speed Serial Linking Device With De-Emphasis Function and The Method Thereof (US Patent 7313187)PriorSmartNo ratings yet
- Casino Bonus Game Using Player Strategy (US Patent 6645071)Document3 pagesCasino Bonus Game Using Player Strategy (US Patent 6645071)PriorSmartNo ratings yet
- TracBeam v. AppleDocument8 pagesTracBeam v. ApplePriorSmartNo ratings yet
- Modern Telecom Systems LLCDocument19 pagesModern Telecom Systems LLCPriorSmartNo ratings yet
- Eckart v. Silberline ManufacturingDocument5 pagesEckart v. Silberline ManufacturingPriorSmartNo ratings yet
- Senju Pharmaceutical Et. Al. v. Metrics Et. Al.Document12 pagesSenju Pharmaceutical Et. Al. v. Metrics Et. Al.PriorSmartNo ratings yet
- VIA Technologies Et. Al. v. ASUS Computer International Et. Al.Document18 pagesVIA Technologies Et. Al. v. ASUS Computer International Et. Al.PriorSmartNo ratings yet
- Richmond v. Creative IndustriesDocument17 pagesRichmond v. Creative IndustriesPriorSmartNo ratings yet
- Senju Pharmaceutical Et. Al. v. Metrics Et. Al.Document12 pagesSenju Pharmaceutical Et. Al. v. Metrics Et. Al.PriorSmartNo ratings yet
- Perrie v. PerrieDocument18 pagesPerrie v. PerriePriorSmartNo ratings yet
- ATEN International v. Uniclass Technology Et. Al.Document14 pagesATEN International v. Uniclass Technology Et. Al.PriorSmartNo ratings yet
- Sun Zapper v. Devroy Et. Al.Document13 pagesSun Zapper v. Devroy Et. Al.PriorSmartNo ratings yet
- Merck Sharp & Dohme v. Fresenius KabiDocument11 pagesMerck Sharp & Dohme v. Fresenius KabiPriorSmartNo ratings yet
- Mcs Industries v. Hds TradingDocument5 pagesMcs Industries v. Hds TradingPriorSmartNo ratings yet
- Merck Sharp & Dohme v. Fresenius KabiDocument10 pagesMerck Sharp & Dohme v. Fresenius KabiPriorSmartNo ratings yet
- TracBeam v. T-Mobile Et. Al.Document9 pagesTracBeam v. T-Mobile Et. Al.PriorSmartNo ratings yet
- GRQ Investment Management v. Financial Engines Et. Al.Document12 pagesGRQ Investment Management v. Financial Engines Et. Al.PriorSmartNo ratings yet
- Dok Solution v. FKA Distributung Et. Al.Document99 pagesDok Solution v. FKA Distributung Et. Al.PriorSmartNo ratings yet
- Multiplayer Network Innovations v. Konami Digital EntertainmentDocument6 pagesMultiplayer Network Innovations v. Konami Digital EntertainmentPriorSmartNo ratings yet
- Shenzhen Liown Electronics v. Luminara Worldwide Et. Al.Document10 pagesShenzhen Liown Electronics v. Luminara Worldwide Et. Al.PriorSmartNo ratings yet
- Determination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerDocument3 pagesDetermination of Hydroxymethylfurfural (HMF) in Honey Using The LAMBDA SpectrophotometerVeronica DrgNo ratings yet
- Interceptor Specifications FinalDocument7 pagesInterceptor Specifications FinalAchint VermaNo ratings yet
- Smashing HTML5 (Smashing Magazine Book Series)Document371 pagesSmashing HTML5 (Smashing Magazine Book Series)tommannanchery211No ratings yet
- -4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويDocument35 pages-4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويAboalmaail Alamin100% (1)
- Fabric DefectsDocument30 pagesFabric Defectsaparna_ftNo ratings yet
- How Do I Predict Event Timing Saturn Nakshatra PDFDocument5 pagesHow Do I Predict Event Timing Saturn Nakshatra PDFpiyushNo ratings yet
- Module 17 Building and Enhancing New Literacies Across The Curriculum BADARANDocument10 pagesModule 17 Building and Enhancing New Literacies Across The Curriculum BADARANLance AustriaNo ratings yet
- Detailed Lesson Plan in Mathematics (Pythagorean Theorem)Document6 pagesDetailed Lesson Plan in Mathematics (Pythagorean Theorem)Carlo DascoNo ratings yet
- Promotion of Coconut in The Production of YoghurtDocument4 pagesPromotion of Coconut in The Production of YoghurtԱբրենիկա ՖերլինNo ratings yet
- Standalone Financial Results, Limited Review Report For December 31, 2016 (Result)Document4 pagesStandalone Financial Results, Limited Review Report For December 31, 2016 (Result)Shyam SunderNo ratings yet
- New KitDocument195 pagesNew KitRamu BhandariNo ratings yet
- 20150714rev1 ASPACC 2015Document22 pages20150714rev1 ASPACC 2015HERDI SUTANTONo ratings yet
- Award Presentation Speech PDFDocument3 pagesAward Presentation Speech PDFNehal RaiNo ratings yet
- List of Practicals Class Xii 2022 23Document1 pageList of Practicals Class Xii 2022 23Night FuryNo ratings yet
- A List of 142 Adjectives To Learn For Success in The TOEFLDocument4 pagesA List of 142 Adjectives To Learn For Success in The TOEFLchintyaNo ratings yet
- Service M5X0G SMDocument98 pagesService M5X0G SMbiancocfNo ratings yet
- Duties and Responsibilities - Filipino DepartmentDocument2 pagesDuties and Responsibilities - Filipino DepartmentEder Aguirre Capangpangan100% (2)
- STAB 2009 s03-p1Document16 pagesSTAB 2009 s03-p1Petre TofanNo ratings yet
- Chapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatDocument123 pagesChapter 8 - Current Electricity - Selina Solutions Concise Physics Class 10 ICSE - KnowledgeBoatskjNo ratings yet
- Electronic Waste Management in Sri Lanka Performance and Environmental Aiudit Report 1 EDocument41 pagesElectronic Waste Management in Sri Lanka Performance and Environmental Aiudit Report 1 ESupun KahawaththaNo ratings yet
- Using MonteCarlo Simulation To Mitigate The Risk of Project Cost OverrunsDocument8 pagesUsing MonteCarlo Simulation To Mitigate The Risk of Project Cost OverrunsJancarlo Mendoza MartínezNo ratings yet
- Sample Paper Book StandardDocument24 pagesSample Paper Book StandardArpana GuptaNo ratings yet
- Research in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDocument13 pagesResearch in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDessy ParamitaNo ratings yet
- Deep Sea 500 Ats ManDocument18 pagesDeep Sea 500 Ats ManLeo Burns50% (2)
- Python Programming Laboratory Manual & Record: Assistant Professor Maya Group of Colleges DehradunDocument32 pagesPython Programming Laboratory Manual & Record: Assistant Professor Maya Group of Colleges DehradunKingsterz gamingNo ratings yet
- TSR 9440 - Ruined KingdomsDocument128 pagesTSR 9440 - Ruined KingdomsJulien Noblet100% (15)
- Characteristics: Our in Vitro IdentityDocument4 pagesCharacteristics: Our in Vitro IdentityMohammed ArifNo ratings yet
- 2002 CT Saturation and Polarity TestDocument11 pages2002 CT Saturation and Polarity Testhashmishahbaz672100% (1)