You might also like
- 5.stability Issues of Synchronous MotorDocument6 pages5.stability Issues of Synchronous MotorchethanNo ratings yet
- Baic Electrical 14Document18 pagesBaic Electrical 14chethanNo ratings yet
- 4.power Systems & Synchronous Motor Operation in IndiaDocument12 pages4.power Systems & Synchronous Motor Operation in IndiachethanNo ratings yet
- 3.operation When Feeding A Local Load, Synchronization & Grid FailureDocument19 pages3.operation When Feeding A Local Load, Synchronization & Grid FailurechethanNo ratings yet
- Basic Electrical 15Document17 pagesBasic Electrical 15chethanNo ratings yet
- Basic Electrical 13Document16 pagesBasic Electrical 13chethanNo ratings yet
- 2.effect of Variation of Load P.F. On Synchronous MachineDocument13 pages2.effect of Variation of Load P.F. On Synchronous MachinechethanNo ratings yet
- 1.synchronous MachinesDocument13 pages1.synchronous MachineschethanNo ratings yet
- Basic Electrical 8thaDocument16 pagesBasic Electrical 8thachethanNo ratings yet
- Basic Electrical 10aDocument20 pagesBasic Electrical 10achethanNo ratings yet
- Basic Electrical 11aDocument17 pagesBasic Electrical 11achethanNo ratings yet
- Basic Electrical 12Document14 pagesBasic Electrical 12chethanNo ratings yet
- Basic Electrical Engineering 7thDocument14 pagesBasic Electrical Engineering 7thchethanNo ratings yet
- Basic Electrical 7thbDocument12 pagesBasic Electrical 7thbchethanNo ratings yet
- 3tee1111 L1aDocument23 pages3tee1111 L1achethanNo ratings yet
- Radio Frequency DC-DC Power Conversion PDFDocument204 pagesRadio Frequency DC-DC Power Conversion PDFchethanNo ratings yet
- 3tee1111 L2BDocument14 pages3tee1111 L2BchethanNo ratings yet
- 3tee1111 L3BDocument9 pages3tee1111 L3BchethanNo ratings yet
- 3tee1111 L3aDocument16 pages3tee1111 L3achethanNo ratings yet
- 3tee1111 L2aDocument13 pages3tee1111 L2achethanNo ratings yet
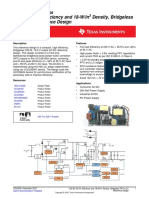
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- DC Motor EmcDocument51 pagesDC Motor EmccalailNo ratings yet
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- 55W - 29828 - 1 - Power Measurements On AC-DCDocument22 pages55W - 29828 - 1 - Power Measurements On AC-DCMansoor Abdul KhaderNo ratings yet
- Final ProjectMANAGEMENT DEVELOPMENT PROGRAMMEDocument110 pagesFinal ProjectMANAGEMENT DEVELOPMENT PROGRAMMEchethanNo ratings yet
- Tiduef8 PDFDocument23 pagesTiduef8 PDFchethanNo ratings yet
- Microgrid Battery StorageDocument129 pagesMicrogrid Battery StoragechethanNo ratings yet
- Basic Data Mining Techniques: AttributesDocument12 pagesBasic Data Mining Techniques: AttributeschethanNo ratings yet
- Project Report BANKING PROJECTDocument85 pagesProject Report BANKING PROJECTchethanNo ratings yet
- Optimal Smart Home Energy Management PDFDocument9 pagesOptimal Smart Home Energy Management PDFchethanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2.microprocessor Microcontroller Lab 2Document73 pages2.microprocessor Microcontroller Lab 2L Narayanan DevaNo ratings yet
- DT301Document18 pagesDT301Antonio PalomoNo ratings yet
- IntroToPracticalElectronicsMicrocontrollersAndSoftwareDesign PDFDocument1,014 pagesIntroToPracticalElectronicsMicrocontrollersAndSoftwareDesign PDFumar438098% (46)
- Cloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldDocument7 pagesCloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldPaul GomezNo ratings yet
- Series Sd31 Um Rev C 2007Document72 pagesSeries Sd31 Um Rev C 2007Boris WilliamsNo ratings yet
- Aegps Manual Fluxpower Hpi Installation enDocument44 pagesAegps Manual Fluxpower Hpi Installation enAbdus SalamNo ratings yet
- Fujitsu Mainboard D3062-A ATX: Data SheetDocument3 pagesFujitsu Mainboard D3062-A ATX: Data SheetpziolkoNo ratings yet
- L&T Relay BrochureDocument32 pagesL&T Relay BrochureSuranjana Das100% (1)
- a850HK1 SM 20170109Document114 pagesa850HK1 SM 20170109Braulio Soto AlfaroNo ratings yet
- RTN XMC-5D ODU Quick Installation Guide 01Document43 pagesRTN XMC-5D ODU Quick Installation Guide 01Ariel Pavez Cifuentes100% (3)
- TLV JA3 Air Drain TrapDocument2 pagesTLV JA3 Air Drain TrapMONANo ratings yet
- Cisco UBR7200 Series Software Configuration GuideDocument324 pagesCisco UBR7200 Series Software Configuration GuideMiki RubirozaNo ratings yet
- ASTM Protocol SataliteDocument46 pagesASTM Protocol SataliteChandrakumaran Sinnappah100% (1)
- STEP 7 - System and Standard Functions For S7-300 and S7-400Document662 pagesSTEP 7 - System and Standard Functions For S7-300 and S7-400TetsusaigaNo ratings yet
- Multitester: Computer System ServicingDocument8 pagesMultitester: Computer System ServicingArthur CapawingNo ratings yet
- Xitanium Prog LeafletDocument8 pagesXitanium Prog LeafletCarlos Jose Sanchez EsparzaNo ratings yet
- Assignment 1 ReportDocument19 pagesAssignment 1 ReportJyiou YimushiNo ratings yet
- GamesDocument43 pagesGamesSunil KumarNo ratings yet
- Udoo ManualDocument46 pagesUdoo ManualAlexandru100% (1)
- Aspire 1410 1680Document129 pagesAspire 1410 1680alexgrtNo ratings yet
- RE616 Cryptix Wireless Siren InstructionsDocument3 pagesRE616 Cryptix Wireless Siren InstructionsSafeHomeCentral DIY Home Security Products and Alarm Monitoring From 8.50No ratings yet
- 26 4 Coherence Virtual Memory Systems 08-10-2021 (08 Oct 2021) Material - I - 08!10!2021 - VirtualmemoryDocument18 pages26 4 Coherence Virtual Memory Systems 08-10-2021 (08 Oct 2021) Material - I - 08!10!2021 - VirtualmemoryMudit JainNo ratings yet
- Nokia Asha 300 RM-781Document20 pagesNokia Asha 300 RM-781Maria de GuerreroNo ratings yet
- Lenovo SL300 SL400 - ASUS ROCKY30 DDR2 UMA - REV 1.0sec PDFDocument94 pagesLenovo SL300 SL400 - ASUS ROCKY30 DDR2 UMA - REV 1.0sec PDFCiprianIfrimNo ratings yet
- Introduction To HP Load Runner Getting Familiar With Load Runner 4046Document28 pagesIntroduction To HP Load Runner Getting Familiar With Load Runner 4046DurgaCharan KanaparthyNo ratings yet
- Atomic Attraction The Psychology of Attraction Free PDF EPUB Download Christopher CanwellDocument2 pagesAtomic Attraction The Psychology of Attraction Free PDF EPUB Download Christopher CanwellHarshil Anand100% (1)
- Inspire 1 (DJI), Scout X4 (Walkera), Voyager 3 (Walkera)Document15 pagesInspire 1 (DJI), Scout X4 (Walkera), Voyager 3 (Walkera)Quads For FunNo ratings yet
- ADE7880 Medidor de EnergiaDocument104 pagesADE7880 Medidor de EnergiaJeziel Vazquez NavaNo ratings yet
- DSE52xx DSE53xx PC Software ManualDocument106 pagesDSE52xx DSE53xx PC Software ManualGustavo Adolfo Alviarez LabradorNo ratings yet
- Ansys 145 Intel SSD BenchmarkDocument22 pagesAnsys 145 Intel SSD BenchmarkMellierNo ratings yet