You might also like
- What Computer Vision With The OpenCVDocument137 pagesWhat Computer Vision With The OpenCVДенис Перевалов100% (5)
- Digital Image Processing: Submitted by Riya ShajiDocument30 pagesDigital Image Processing: Submitted by Riya ShajiRiya ShajiNo ratings yet
- Task 5 Image ProcessingDocument5 pagesTask 5 Image Processingmohanad_j_jindeelNo ratings yet
- A Guide To Choose Digital Camera and Camcorder: Significance of The TopicDocument15 pagesA Guide To Choose Digital Camera and Camcorder: Significance of The TopicIsham IbrahimNo ratings yet
- Instructor: Er. MAHENDRA KUMAR PATILDocument41 pagesInstructor: Er. MAHENDRA KUMAR PATILmahi271286No ratings yet
- Lecture 2 Fundamental Steps in Digital Image ProcessingDocument4 pagesLecture 2 Fundamental Steps in Digital Image ProcessingAaqib IhrazNo ratings yet
- IT Essentials Chp1Document36 pagesIT Essentials Chp1NAVINRAJ RSNo ratings yet
- Motion Detection Sceurity CameraDocument29 pagesMotion Detection Sceurity Cameraspsankar1No ratings yet
- Digital Image ProcessingDocument14 pagesDigital Image Processingnirankari_satishNo ratings yet
- Implementation and Optimization of Embedded Image Processing SystemDocument6 pagesImplementation and Optimization of Embedded Image Processing SystemGraceNo ratings yet
- Wa0026.Document9 pagesWa0026.NaveenNo ratings yet
- Digital Image ProcessingDocument51 pagesDigital Image ProcessingNishanthi BheemanNo ratings yet
- Stereo Vision Applying Opencv and Raspberry Pi: Commission IIDocument5 pagesStereo Vision Applying Opencv and Raspberry Pi: Commission IISouvik DattaNo ratings yet
- Presented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)Document15 pagesPresented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)api-19799369No ratings yet
- UNIT1Document4 pagesUNIT1Tajammul Hussain MistryNo ratings yet
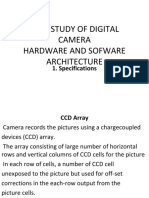
- Case Study of Digital Camera Hardware and Sofware ArchitectureDocument28 pagesCase Study of Digital Camera Hardware and Sofware ArchitectureRhythm ChoukseyNo ratings yet
- Areial ImageDocument84 pagesAreial ImageudayszNo ratings yet
- VVBVBVBBDocument19 pagesVVBVBVBBnasimakhtarNo ratings yet
- Smart CameraDocument8 pagesSmart CameraSanthosh SalemNo ratings yet
- NI Tutorial 2808 enDocument4 pagesNI Tutorial 2808 enharjanto_utomoNo ratings yet
- Image Processing Applied To TrafficDocument13 pagesImage Processing Applied To TrafficDivya SreeNo ratings yet
- Unit-1 Important QuestionsDocument24 pagesUnit-1 Important QuestionsSrikanth ChapidiNo ratings yet
- Module 1Document29 pagesModule 1rofiwi6692No ratings yet
- Unit 6Document8 pagesUnit 6human1233980% (1)
- DIGITAL IMAGE PROCESSING2 PresentationDocument16 pagesDIGITAL IMAGE PROCESSING2 PresentationKavya ChumNo ratings yet
- Components of An Image Processing SystemDocument3 pagesComponents of An Image Processing SystemKrishanu ModakNo ratings yet
- Answers of Booklet1-4Document33 pagesAnswers of Booklet1-4Riaz RasoolNo ratings yet
- Ip-Distributed Computer-Aided Video-Surveillance System: S Redureau'Document5 pagesIp-Distributed Computer-Aided Video-Surveillance System: S Redureau'Payal AnandNo ratings yet
- 0420-NOS As AnswersDocument33 pages0420-NOS As AnswersTebello RatauNo ratings yet
- Real-Time Image Processing Applied To Traffic - Queue Detection AlgorithmDocument12 pagesReal-Time Image Processing Applied To Traffic - Queue Detection Algorithmapi-26172869No ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument47 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionTapas Kumar DeyNo ratings yet
- 0420-Computer Studies - 1Document24 pages0420-Computer Studies - 1Eunice FederickNo ratings yet
- Digital Image Processing Notes PDFDocument139 pagesDigital Image Processing Notes PDFRaja Sekhar100% (4)
- Components DipDocument31 pagesComponents Dipmeenakshi nagarajanNo ratings yet
- Arvind DMK ReviewDocument29 pagesArvind DMK ReviewmmascoNo ratings yet
- 10.31829 2689 6958.jes2020 3 (1) 111Document18 pages10.31829 2689 6958.jes2020 3 (1) 111nikhilshetty1951No ratings yet
- DIPDocument3 pagesDIPmaisuriyahani07No ratings yet
- Computer Answers For PapersDocument33 pagesComputer Answers For PapersZara DanishNo ratings yet
- Elec4 Project - 2008/2009 Automatic Insect Monitoring: Renaud GENSOLEN Guillaume LAUER Jonathan MOLON June 19, 2009Document34 pagesElec4 Project - 2008/2009 Automatic Insect Monitoring: Renaud GENSOLEN Guillaume LAUER Jonathan MOLON June 19, 2009Shivam JaiswalNo ratings yet
- AI PPT Spring 2k22Document44 pagesAI PPT Spring 2k22Hussnain Waheed BhattiNo ratings yet
- Embedded Software For Pedestrian Detection Using The Raspberry PiDocument32 pagesEmbedded Software For Pedestrian Detection Using The Raspberry PiCường HuỳnhNo ratings yet
- Husseina Ozigi Otaru Final ReportDocument27 pagesHusseina Ozigi Otaru Final ReportRohit GuptaNo ratings yet
- DIP Lecture 4 - Components of Image ProcessingDocument4 pagesDIP Lecture 4 - Components of Image ProcessingSamrat BorkarNo ratings yet
- Unit - 2 Mumltiedia SystemsDocument6 pagesUnit - 2 Mumltiedia SystemsSivakumar KoppulaNo ratings yet
- BSIT 51 Previous Year Question Paper SolveDocument27 pagesBSIT 51 Previous Year Question Paper SolveKunal Patra100% (1)
- Research PaperDocument5 pagesResearch PaperAbhipriya MishraNo ratings yet
- Prof David Marshall: Dave - Marshall@cs - Cardiff.ac - UkDocument27 pagesProf David Marshall: Dave - Marshall@cs - Cardiff.ac - UkJoyce Ann Ebora SulaboNo ratings yet
- Image Processing PresentationDocument10 pagesImage Processing PresentationSagar A ShahNo ratings yet
- Homulle-Zimmerling Thesis UAV Camera System PDFDocument82 pagesHomulle-Zimmerling Thesis UAV Camera System PDFAlexandru CozmaNo ratings yet
- Digital Photography GlossaryDocument5 pagesDigital Photography GlossaryraghavNo ratings yet
- Digital Image ProcessingDocument234 pagesDigital Image ProcessingprabhanatarajanNo ratings yet
- 2021 Dip 1Document37 pages2021 Dip 1Abdul KadirNo ratings yet
- Digital Image Processing Unit 1Document42 pagesDigital Image Processing Unit 1Anusha PadmavathiNo ratings yet
- A Report ON Frame Graber CardDocument10 pagesA Report ON Frame Graber CardNikhilesh KhatraNo ratings yet
- Image Compression: Efficient Techniques for Visual Data OptimizationFrom EverandImage Compression: Efficient Techniques for Visual Data OptimizationNo ratings yet
- Smart Camera: Revolutionizing Visual Perception with Computer VisionFrom EverandSmart Camera: Revolutionizing Visual Perception with Computer VisionNo ratings yet
- Application Forms International Festival/Competition of Electroacoustic Music and Multimedia" Sync.2013" Category "B" Form 1Document3 pagesApplication Forms International Festival/Competition of Electroacoustic Music and Multimedia" Sync.2013" Category "B" Form 1Денис ПереваловNo ratings yet
- Application Forms International Festival/Competition of Electroacoustic Music and Multimedia" Sync.2013" Category "A" Form 1Document3 pagesApplication Forms International Festival/Competition of Electroacoustic Music and Multimedia" Sync.2013" Category "A" Form 1Денис ПереваловNo ratings yet
- Shaders in OpenFrameworksDocument16 pagesShaders in OpenFrameworksДенис ПереваловNo ratings yet
- OpenFrameworks Lections: Interactive SoundDocument35 pagesOpenFrameworks Lections: Interactive SoundДенис ПереваловNo ratings yet
- OpenFrameworks Lection: 2d GraphicsDocument39 pagesOpenFrameworks Lection: 2d GraphicsДенис ПереваловNo ratings yet
- Open Frameworks and OpenCVDocument43 pagesOpen Frameworks and OpenCVДенис ПереваловNo ratings yet
- OpenFrameworks Lections: 1. Interactive Multimedia Systems.Document42 pagesOpenFrameworks Lections: 1. Interactive Multimedia Systems.Денис ПереваловNo ratings yet
- OpenCV Lections: 7. Working With Camera. Background and Motion AnalysisDocument22 pagesOpenCV Lections: 7. Working With Camera. Background and Motion AnalysisДенис Перевалов100% (3)
- Что может и не может OpenCVDocument137 pagesЧто может и не может OpenCVcaptain_arcticNo ratings yet
- OpenCV Lections: 3. Mat ClassDocument16 pagesOpenCV Lections: 3. Mat ClassДенис Перевалов100% (1)
- OpenCV Lections: 4. Working With The Channels, The Threshold Processing, Flood FillDocument26 pagesOpenCV Lections: 4. Working With The Channels, The Threshold Processing, Flood FillДенис ПереваловNo ratings yet
- 20-Admission of PatientDocument3 pages20-Admission of Patientakositabon100% (1)
- PSA Poster Project WorkbookDocument38 pagesPSA Poster Project WorkbookwalliamaNo ratings yet
- Chapter - I Introduction and Design of The StudyDocument72 pagesChapter - I Introduction and Design of The StudyramNo ratings yet
- Lieh TzuDocument203 pagesLieh TzuBrent Cullen100% (2)
- Patrick Meyer Reliability Understanding Statistics 2010Document160 pagesPatrick Meyer Reliability Understanding Statistics 2010jcgueinj100% (1)
- Micro EvolutionDocument9 pagesMicro EvolutionBryan TanNo ratings yet
- Latched, Flip-Flops, and TimersDocument36 pagesLatched, Flip-Flops, and TimersMuhammad Umair AslamNo ratings yet
- Jackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairDocument65 pagesJackson V AEGLive - May 10 Transcripts, of Karen Faye-Michael Jackson - Make-up/HairTeamMichael100% (2)
- Fds-Ofite Edta 0,1MDocument7 pagesFds-Ofite Edta 0,1MVeinte Años Sin VosNo ratings yet
- Application Form InnofundDocument13 pagesApplication Form InnofundharavinthanNo ratings yet
- John L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDocument12 pagesJohn L. Selzer - Merit and Degree in Webster's - The Duchess of MalfiDivya AggarwalNo ratings yet
- Development Developmental Biology EmbryologyDocument6 pagesDevelopment Developmental Biology EmbryologyBiju ThomasNo ratings yet
- Phytotherapy On CancerDocument21 pagesPhytotherapy On CancerSiddhendu Bhattacharjee100% (1)
- Apron CapacityDocument10 pagesApron CapacityMuchammad Ulil AidiNo ratings yet
- Catedral de SevillaDocument28 pagesCatedral de SevillaAnonymous LkgNmKeNo ratings yet
- Cyber Briefing Series - Paper 2 - FinalDocument24 pagesCyber Briefing Series - Paper 2 - FinalMapacheYorkNo ratings yet
- ISO 27001 Introduction Course (05 IT01)Document56 pagesISO 27001 Introduction Course (05 IT01)Sheik MohaideenNo ratings yet
- Synthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingDocument12 pagesSynthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingPedroAugustoNo ratings yet
- FuzzingBluetooth Paul ShenDocument8 pagesFuzzingBluetooth Paul Shen许昆No ratings yet
- Impact of Pantawid Pamilyang Pilipino Program On EducationDocument10 pagesImpact of Pantawid Pamilyang Pilipino Program On EducationEllyssa Erika MabayagNo ratings yet
- Unsuccessful MT-SM DeliveryDocument2 pagesUnsuccessful MT-SM DeliveryPitam MaitiNo ratings yet
- Kazon Greater Predator MothershipDocument1 pageKazon Greater Predator MothershipknavealphaNo ratings yet
- Subject Manual Tle 7-8Document11 pagesSubject Manual Tle 7-8Rhayan Dela Cruz DaquizNo ratings yet
- Amount of Casien in Diff Samples of Milk (U)Document15 pagesAmount of Casien in Diff Samples of Milk (U)VijayNo ratings yet
- Performance Monitoring and Coaching FormDocument3 pagesPerformance Monitoring and Coaching Formjanine masilang100% (2)
- Mosfet Irfz44Document8 pagesMosfet Irfz44huynhsang1979No ratings yet
- An Annotated Bibliography of Timothy LearyDocument312 pagesAn Annotated Bibliography of Timothy LearyGeetika CnNo ratings yet
- Hidrl1 PDFDocument7 pagesHidrl1 PDFRajesh Kumar100% (1)
- Department of Education: Republic of The PhilippinesDocument1 pageDepartment of Education: Republic of The PhilippinesJonathan CayatNo ratings yet
- Ccoli: Bra Ica Ol A LDocument3 pagesCcoli: Bra Ica Ol A LsychaitanyaNo ratings yet