You might also like
- SAP Analytics Cloud - Landscape Architecture and Life-Cycle ManagementDocument57 pagesSAP Analytics Cloud - Landscape Architecture and Life-Cycle ManagementtataxpNo ratings yet
- Object Tracking Robot Onraspberry Pi Using OpencvDocument4 pagesObject Tracking Robot Onraspberry Pi Using OpencvAyakyusha AiNo ratings yet
- 2022-2023-1st-Quarter-Exam-Computer Programming Grade 12-1920Document6 pages2022-2023-1st-Quarter-Exam-Computer Programming Grade 12-1920Edeson John CabanesNo ratings yet
- Camera Jammer Synopsis Electronics Engineering Project Erole Technologies PVT LTDDocument11 pagesCamera Jammer Synopsis Electronics Engineering Project Erole Technologies PVT LTDErole Technologies Pvt ltd Homemade EngineerNo ratings yet
- Create 3D Games in Godot: A Live WorkshopDocument24 pagesCreate 3D Games in Godot: A Live WorkshopLuis OENo ratings yet
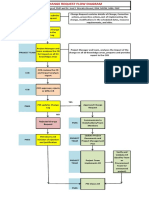
- Change Request Flow DiagramDocument2 pagesChange Request Flow DiagramSwapnil0% (1)
- 019 PDFDocument6 pages019 PDFNguyễnĐạtNo ratings yet
- FPGA Robot Arm Assistant: Final Project ReportDocument32 pagesFPGA Robot Arm Assistant: Final Project Reporthassan angularNo ratings yet
- Dji Robomaster Ai Challenge Technical ReportDocument10 pagesDji Robomaster Ai Challenge Technical ReportSaad khalilNo ratings yet
- Real-Time Machine Vision Based Robot: G. Sathya G. Ramesh ChandraDocument10 pagesReal-Time Machine Vision Based Robot: G. Sathya G. Ramesh ChandragrchandraNo ratings yet
- Mobile Phone Camera Interface PrimerDocument13 pagesMobile Phone Camera Interface PrimerOttoNo ratings yet
- Chapter-3 Modal Implementation and AnalysisDocument23 pagesChapter-3 Modal Implementation and AnalysisAbbey Benedict TuminiNo ratings yet
- Raspberry Pi Camera SoftwareDocument1 pageRaspberry Pi Camera SoftwareSteve AttwoodNo ratings yet
- Ijresm V1 I12 74Document4 pagesIjresm V1 I12 74BHUPANI SREE MADHUKIRAN ECEUG-2020 BATCHNo ratings yet
- Arduino DroneDocument27 pagesArduino DroneEdwardNo ratings yet
- Research PaperDocument5 pagesResearch Papertooba mukhtarNo ratings yet
- g4 Project ReportDocument60 pagesg4 Project ReportDrake Moses KabbsNo ratings yet
- Thesisfors - Removed (1) - 22-43Document22 pagesThesisfors - Removed (1) - 22-43zinda abadNo ratings yet
- Interfacing of MATLAB With Arduino For Face RecognitionDocument5 pagesInterfacing of MATLAB With Arduino For Face Recognitionsrijith rajNo ratings yet
- Introducing Enhanced V4L2 APIs for Digital Camera DevicesDocument58 pagesIntroducing Enhanced V4L2 APIs for Digital Camera DevicesThamilarasan PalaniNo ratings yet
- NI Tutorial 2808 enDocument4 pagesNI Tutorial 2808 enharjanto_utomoNo ratings yet
- 113 115 Object Detection and Tracking Using Image ProcessingDocument3 pages113 115 Object Detection and Tracking Using Image ProcessingRezaa NishikawaNo ratings yet
- SSRN Id4152378Document9 pagesSSRN Id4152378Pedro OdorizziNo ratings yet
- Acquiring From GigE CamerasDocument5 pagesAcquiring From GigE Camerascnrk777No ratings yet
- La Divina Comedia 2Document7 pagesLa Divina Comedia 2JoseSantizRuizNo ratings yet
- Live Video Streaming Using Raspberry Pi in Iot Devices IJERTCONV5IS19009Document5 pagesLive Video Streaming Using Raspberry Pi in Iot Devices IJERTCONV5IS19009Sruthi ReddyNo ratings yet
- 10.31829 2689 6958.jes2020 3 (1) 111Document18 pages10.31829 2689 6958.jes2020 3 (1) 111nikhilshetty1951No ratings yet
- Huu Quocnguyen2015 PDFDocument3 pagesHuu Quocnguyen2015 PDFPEPE HUARCONo ratings yet
- Automatic License Plate Recoganization System Based On Image Processing Using LabviewDocument5 pagesAutomatic License Plate Recoganization System Based On Image Processing Using LabviewNguyen Minh ThaiNo ratings yet
- Real Time Object Detection & Tracking with Rotating CameraDocument7 pagesReal Time Object Detection & Tracking with Rotating CameraARif HakimNo ratings yet
- Esp32 CamDocument6 pagesEsp32 CamDaniel FirdausNo ratings yet
- The Opencv User Guide: Release 2.4.9.0Document23 pagesThe Opencv User Guide: Release 2.4.9.0osilatorNo ratings yet
- Object detection and tracking using image processingDocument3 pagesObject detection and tracking using image processingSreekanth PagadapalliNo ratings yet
- Wa0026.Document9 pagesWa0026.NaveenNo ratings yet
- Iirdem Design and Implementation of Finger Writing in Air by Using Open CV (Computer Vision) Library On ArmDocument5 pagesIirdem Design and Implementation of Finger Writing in Air by Using Open CV (Computer Vision) Library On ArmiaetsdiaetsdNo ratings yet
- Raspberry Pi Based Portable 3D Measurement SystemDocument8 pagesRaspberry Pi Based Portable 3D Measurement SystemSamet ÇetinNo ratings yet
- Embedded Real Time Video Monitoring System Using Arm: Kavitha Mamindla, Dr.V.Padmaja, CH - NagadeepaDocument5 pagesEmbedded Real Time Video Monitoring System Using Arm: Kavitha Mamindla, Dr.V.Padmaja, CH - Nagadeepabrao89No ratings yet
- Cognex Industrial Cameras PDFDocument4 pagesCognex Industrial Cameras PDFkdsNo ratings yet
- 2D23D Final Report Team B3Document31 pages2D23D Final Report Team B3Jeremy LeungNo ratings yet
- Implementation of Image Processing On Raspberry PiDocument5 pagesImplementation of Image Processing On Raspberry Piajithmanohar1221No ratings yet
- CC12 enDocument76 pagesCC12 enemadhsobhyNo ratings yet
- Lane Detection and Tracking by Video SensorsDocument6 pagesLane Detection and Tracking by Video SensorsTriệu NguyễnNo ratings yet
- Smart CameraDocument8 pagesSmart CameraSanthosh SalemNo ratings yet
- TNE 022A 20190402 00 - JAI SDK To eBUSDocument12 pagesTNE 022A 20190402 00 - JAI SDK To eBUSloyclayNo ratings yet
- F-ViewII enDocument75 pagesF-ViewII enemadhsobhyNo ratings yet
- HOM E Secu Rity AND Safe TY Syst EMDocument18 pagesHOM E Secu Rity AND Safe TY Syst EMAws FaeqNo ratings yet
- Pic-Microcontroller Based Neural Network & Image Processing Controlled Low Cost Autonomous VehicleDocument4 pagesPic-Microcontroller Based Neural Network & Image Processing Controlled Low Cost Autonomous VehicleAravindha BhatNo ratings yet
- Topic: Automatic Face Mask DetectionDocument40 pagesTopic: Automatic Face Mask DetectionRohan AshishNo ratings yet
- Ijarcce 200Document3 pagesIjarcce 200Saeideh OraeiNo ratings yet
- Automatic Image Registration Using MATLAB Simulink Model Configured On DM6437EVM ProcessorDocument4 pagesAutomatic Image Registration Using MATLAB Simulink Model Configured On DM6437EVM ProcessorAnonymous gF0DJW10yNo ratings yet
- Muscle Movement and Facial Emoji Detection Via Raspberry Pi AuthorsDocument8 pagesMuscle Movement and Facial Emoji Detection Via Raspberry Pi AuthorsGokul KNo ratings yet
- Applications of Computer GraphicsDocument40 pagesApplications of Computer GraphicsMar AnniNo ratings yet
- Fpga Based Object Tracking System: Project ReportDocument12 pagesFpga Based Object Tracking System: Project ReportAchraf El aouameNo ratings yet
- Li DeepFusion Lidar-Camera Deep Fusion For Multi-Modal 3D Object Detection CVPR 2022 PaperDocument10 pagesLi DeepFusion Lidar-Camera Deep Fusion For Multi-Modal 3D Object Detection CVPR 2022 PaperhaisabiNo ratings yet
- Hand Gesture Based Camera Monitorning System Using Raspberry PiDocument4 pagesHand Gesture Based Camera Monitorning System Using Raspberry PidanangkitaNo ratings yet
- VITSAT-1 PAYLOAD REPORT camera goalsDocument12 pagesVITSAT-1 PAYLOAD REPORT camera goalsVarun ReddyNo ratings yet
- Image Processing ReportDocument15 pagesImage Processing Reportrobin singhNo ratings yet
- 3DUNDERWORLD User ManualDocument5 pages3DUNDERWORLD User Manualquyen2012No ratings yet
- Multi Sensor Write Up PaperDocument7 pagesMulti Sensor Write Up PaperTRIAD TECHNO SERVICESNo ratings yet
- Seminar Paper 1Document4 pagesSeminar Paper 1Ravichandra GanganarasaiahNo ratings yet
- Kinect camera applied for autonomous robot signalling panel recognitionDocument9 pagesKinect camera applied for autonomous robot signalling panel recognitionRaul AlexNo ratings yet
- Tracking For Studio CamerasDocument6 pagesTracking For Studio CamerasZAIDAN DIDINo ratings yet
- Kinect v2 For Mobile Robot Navigation: Evaluation and ModelingDocument7 pagesKinect v2 For Mobile Robot Navigation: Evaluation and ModelingWaseem HassanNo ratings yet
- National Grid Evolution and StructureDocument30 pagesNational Grid Evolution and StructureSouvik DattaNo ratings yet
- Meera P. S. SELECT, VIT Chennai: Eee 3003: Power System EngineeringDocument9 pagesMeera P. S. SELECT, VIT Chennai: Eee 3003: Power System EngineeringSouvik DattaNo ratings yet
- Class On 6th September, 2021Document11 pagesClass On 6th September, 2021Souvik DattaNo ratings yet
- Meera P. S. SELECT, VIT Chennai: Eee 3003: Power System EngineeringDocument10 pagesMeera P. S. SELECT, VIT Chennai: Eee 3003: Power System EngineeringSouvik DattaNo ratings yet
- ESP8266 WiFi Guide: Network Protocols ExplainedDocument7 pagesESP8266 WiFi Guide: Network Protocols ExplainedSouvik DattaNo ratings yet
- Closed Loop Solar - Research GateDocument6 pagesClosed Loop Solar - Research GateSouvik DattaNo ratings yet
- Mencoba BerbagiDocument10 pagesMencoba BerbagimelziambarNo ratings yet
- Syllogism Best Concepts, Method, Approach To Solve Reasoning ForDocument22 pagesSyllogism Best Concepts, Method, Approach To Solve Reasoning ForIndrajeeetNo ratings yet
- E CommerceDocument13 pagesE CommercesatishgwNo ratings yet
- My CV/PortfolioDocument29 pagesMy CV/PortfolioWes BallaoNo ratings yet
- PBGGDDocument4 pagesPBGGDLuis Rodriguez100% (2)
- Iut JournalDocument20 pagesIut JournalRong GuoNo ratings yet
- Correlations: NotesDocument4 pagesCorrelations: NotesMamank BerBudi SantosoNo ratings yet
- Adedayo Akinlabi Final PaperDocument3 pagesAdedayo Akinlabi Final PaperDayo TageNo ratings yet
- AI Multiagent Shopping System Recommends Optimal ProductsDocument9 pagesAI Multiagent Shopping System Recommends Optimal ProductsDaniel RizviNo ratings yet
- Fiber Doctor System Introduction ISSUE 1.30 - NCEDocument55 pagesFiber Doctor System Introduction ISSUE 1.30 - NCErafael antonio padilla mayorgaNo ratings yet
- FUNCTIONSDocument16 pagesFUNCTIONSHero KardeşlerNo ratings yet
- AirPrime - GNSS Tool - User Guide - Rev5.0Document44 pagesAirPrime - GNSS Tool - User Guide - Rev5.0nguyen nguyenNo ratings yet
- NUCES Grading PolicyDocument2 pagesNUCES Grading PolicyFaisal TehseenNo ratings yet
- Manual AL1900Document103 pagesManual AL1900Mario Julio de Oliveira SilvaNo ratings yet
- Poojan Kheni 190640107007 Sem 8 Internship PPT Review 0Document29 pagesPoojan Kheni 190640107007 Sem 8 Internship PPT Review 0PARTH RAJPUTNo ratings yet
- 150 Sofware Project Ideas For Students of Computer ScienceDocument5 pages150 Sofware Project Ideas For Students of Computer SciencePuneet Arora81% (27)
- Near-Optimal Learning of Tree-Structured Distributions by Chow-LiuDocument33 pagesNear-Optimal Learning of Tree-Structured Distributions by Chow-Liusutanu gayenNo ratings yet
- DigitalOcean Invoice 2021 SepDocument1 pageDigitalOcean Invoice 2021 SepsajidNo ratings yet
- OOP_LAB_EMPLOYEE_FILEDocument4 pagesOOP_LAB_EMPLOYEE_FILENazia buttNo ratings yet
- Practicum Evaluation Tool 1 1Document3 pagesPracticum Evaluation Tool 1 1api-583841034No ratings yet
- Nokia Siemens Networks SGSN SG7.0 Cause DescriptionDocument81 pagesNokia Siemens Networks SGSN SG7.0 Cause DescriptionBibiana TamayoNo ratings yet
- Invinsense OMDRDocument7 pagesInvinsense OMDRinfoperceptNo ratings yet
- PX-4226A-A: Owner's ManualDocument38 pagesPX-4226A-A: Owner's ManualFaizall SahbudinNo ratings yet
- Computer Networks (BEG374CO)Document1 pageComputer Networks (BEG374CO)Subas ShresthaNo ratings yet
- PIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersDocument472 pagesPIC16 (L) F1704/8: 8-Bit Advanced Analog Flash MicrocontrollersGabriel VillanuevaNo ratings yet
- BFX SeriesDocument10 pagesBFX SeriesPuji AntoroNo ratings yet
- Nikita Sarels 22251423 Computer Info Systems 2Document8 pagesNikita Sarels 22251423 Computer Info Systems 2anthony sarelsNo ratings yet