You might also like
- Object Tracking Robot Onraspberry Pi Using OpencvDocument4 pagesObject Tracking Robot Onraspberry Pi Using OpencvAyakyusha AiNo ratings yet
- Iirdem Design and Implementation of Finger Writing in Air by Using Open CV (Computer Vision) Library On ArmDocument5 pagesIirdem Design and Implementation of Finger Writing in Air by Using Open CV (Computer Vision) Library On ArmiaetsdiaetsdNo ratings yet
- Live Video Streaming Using Raspberry Pi in Iot Devices IJERTCONV5IS19009Document5 pagesLive Video Streaming Using Raspberry Pi in Iot Devices IJERTCONV5IS19009Sruthi ReddyNo ratings yet
- Chapter - 1: Controlling Robot Through Gesture RecognitionDocument9 pagesChapter - 1: Controlling Robot Through Gesture Recognitionamruta ghuteNo ratings yet
- Raspberry Pi Based Voice-Operated Personal Assistant (Neobot)Document5 pagesRaspberry Pi Based Voice-Operated Personal Assistant (Neobot)rock starNo ratings yet
- Python-Based Raspberry Pi For Hand Gesture Recognition: International Journal of Computer Applications September 2017Document8 pagesPython-Based Raspberry Pi For Hand Gesture Recognition: International Journal of Computer Applications September 2017Rozita JackNo ratings yet
- IOT Based Theft Detection Using Raspberry Pi: ISSN: 2454-132X Impact Factor: 4.295Document4 pagesIOT Based Theft Detection Using Raspberry Pi: ISSN: 2454-132X Impact Factor: 4.295Mrunali VaruteNo ratings yet
- Robotic Arm Design ProjectDocument3 pagesRobotic Arm Design ProjectOreoluwa AdediwuraNo ratings yet
- Wi-Fi Surveillance Robot using Raspberry piDocument6 pagesWi-Fi Surveillance Robot using Raspberry piMadhava KrishnaNo ratings yet
- FinalPaperVirtual Telepresence Rob171200Document5 pagesFinalPaperVirtual Telepresence Rob171200paul selviNo ratings yet
- Implementation of Image Processing On Raspberry PiDocument5 pagesImplementation of Image Processing On Raspberry Piajithmanohar1221No ratings yet
- Ijresm V1 I12 74Document4 pagesIjresm V1 I12 74BHUPANI SREE MADHUKIRAN ECEUG-2020 BATCHNo ratings yet
- IOT, Sumaiya KhanDocument22 pagesIOT, Sumaiya Khanshashank kumarNo ratings yet
- Final PPT (Autosaved)Document34 pagesFinal PPT (Autosaved)KARTHIK.K 18BEC023No ratings yet
- An Intelligent Door System Using Raspberry Pi and Amazon Web Services IotDocument6 pagesAn Intelligent Door System Using Raspberry Pi and Amazon Web Services IotPEC Akshat ShrinateNo ratings yet
- Unit II IoTDocument44 pagesUnit II IoTCHINNA VENKATA VARMA100% (2)
- Notice BoardDocument4 pagesNotice BoardNimmagadda Chandra PaulNo ratings yet
- Real time image processing controls robotic arm using Raspberry PiDocument5 pagesReal time image processing controls robotic arm using Raspberry PiLinh AnhNo ratings yet
- Advance Surveillance Robot With Robotic Arm Control Over IotDocument5 pagesAdvance Surveillance Robot With Robotic Arm Control Over IotInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Embedded SystemsDocument6 pagesEmbedded SystemsShuvoNo ratings yet
- Distributed FPGA-based Smart Camera Architecture For Computer Vision ApplicationsDocument4 pagesDistributed FPGA-based Smart Camera Architecture For Computer Vision ApplicationsAraya KirosNo ratings yet
- Research PaperDocument6 pagesResearch PaperBVM TPC EL 22No ratings yet
- Real Time Object Detection & Tracking with Rotating CameraDocument7 pagesReal Time Object Detection & Tracking with Rotating CameraARif HakimNo ratings yet
- Design and Implementation of The Smart Door Lock System With Face Recognition Method Using The Linux Platform Raspberry PiDocument7 pagesDesign and Implementation of The Smart Door Lock System With Face Recognition Method Using The Linux Platform Raspberry PiSuraj Biswas100% (1)
- Home Automation Using Android and Raspberry Pi (Literature Review)Document3 pagesHome Automation Using Android and Raspberry Pi (Literature Review)JournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Design and Implementation of Anti-Theft Module For ATM MachineDocument4 pagesDesign and Implementation of Anti-Theft Module For ATM Machinemonishabe23No ratings yet
- Computer Vision Entry ManagementDocument19 pagesComputer Vision Entry ManagementPriyanka ECCNo ratings yet
- Iot Based Smart Surveillance Security System Using Raspberry PiDocument5 pagesIot Based Smart Surveillance Security System Using Raspberry PiPavan KumarNo ratings yet
- Bilg in 2016Document5 pagesBilg in 2016Daniyal AhmadNo ratings yet
- Stereo Vision Applying Opencv and Raspberry Pi: Commission IIDocument5 pagesStereo Vision Applying Opencv and Raspberry Pi: Commission IISouvik DattaNo ratings yet
- Gesture Control ReportDocument4 pagesGesture Control ReportHarsh DaharwalNo ratings yet
- Fig.1.1 Basic Block Diagram of ProjectDocument44 pagesFig.1.1 Basic Block Diagram of ProjectSATYAM RAJNo ratings yet
- Report Project-1 PDFDocument44 pagesReport Project-1 PDFSATYAM RAJNo ratings yet
- Design and Implementations of Control System Quadruped Robot Driver Application Based On Windows PlatformDocument8 pagesDesign and Implementations of Control System Quadruped Robot Driver Application Based On Windows Platformpuskesmas III denpasar utaraNo ratings yet
- Enhanced Surveillance System For ATM Looters Using PIC MicrocontrollerDocument4 pagesEnhanced Surveillance System For ATM Looters Using PIC Microcontrollermonishabe23No ratings yet
- SSRN Id3568411Document3 pagesSSRN Id3568411Nahimana FerdinandNo ratings yet
- Motion Control Using Image Processing: 1. MotivationDocument8 pagesMotion Control Using Image Processing: 1. MotivationMuteeb KhanNo ratings yet
- Arduino DroneDocument27 pagesArduino DroneEdwardNo ratings yet
- 10.31829 2689 6958.jes2020 3 (1) 111Document18 pages10.31829 2689 6958.jes2020 3 (1) 111nikhilshetty1951No ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentPraveenSpambNo ratings yet
- Unit 4Document6 pagesUnit 4acer an0% (1)
- Smart Home Automation: Team Members: Kishan Singh Supervised by Mr. Rakesh Kumar GalavDocument13 pagesSmart Home Automation: Team Members: Kishan Singh Supervised by Mr. Rakesh Kumar GalavKISHAN SINGHNo ratings yet
- Implementation of Vision Based Landing Target Detection For Vtol Uav Using Raspberry PiDocument5 pagesImplementation of Vision Based Landing Target Detection For Vtol Uav Using Raspberry PiKeong MasNo ratings yet
- Raspberry Pi Definition in IotDocument5 pagesRaspberry Pi Definition in Iotanu and ketan vlogsNo ratings yet
- Intruder Alert SystemDocument16 pagesIntruder Alert SystemShivani KulkarniNo ratings yet
- Iot Assignment Module 1: Name: Rohit Yadav Roll No: CS19206702 1) Explain SOC / Short Note On SOC SolutionDocument10 pagesIot Assignment Module 1: Name: Rohit Yadav Roll No: CS19206702 1) Explain SOC / Short Note On SOC SolutionRohit YadavNo ratings yet
- 5198 A 083Document5 pages5198 A 083Kumar ShanuNo ratings yet
- Smart Surveillance Monitoring System: Indian Journal of Textile Research June 2018Document4 pagesSmart Surveillance Monitoring System: Indian Journal of Textile Research June 2018Muhammad Waleed KhanNo ratings yet
- WiFi Robocam ReportDocument4 pagesWiFi Robocam ReportSrimukhakaranthaNo ratings yet
- Unit IvDocument17 pagesUnit IvRagul AadithyaNo ratings yet
- Robotics Internship Report: Embedded Controllers and SensorsDocument45 pagesRobotics Internship Report: Embedded Controllers and Sensorskutty vicky75% (4)
- Technology and The Stage:: Achieving Control Through The Kinect/Arduino InterfaceDocument11 pagesTechnology and The Stage:: Achieving Control Through The Kinect/Arduino InterfaceAchraf BourassNo ratings yet
- Electronic Eye For Visually Challenged PeopleDocument4 pagesElectronic Eye For Visually Challenged PeopleIJSTENo ratings yet
- Learn IoT Programming Using Node-RED: Begin to Code Full Stack IoT Apps and Edge Devices with Raspberry Pi, NodeJS, and GrafanaFrom EverandLearn IoT Programming Using Node-RED: Begin to Code Full Stack IoT Apps and Edge Devices with Raspberry Pi, NodeJS, and GrafanaNo ratings yet
- Nikhade 2014Document6 pagesNikhade 2014saathvekha16No ratings yet
- Autonomous CarDocument20 pagesAutonomous CaratomNo ratings yet
- Proposal For The Computer VisionDocument5 pagesProposal For The Computer Visionph KithsiriNo ratings yet
- Part B&C - Cat3Document16 pagesPart B&C - Cat3Keesha DeepakNo ratings yet
- A Vision Base Application For Virtual Mouse Interface Using Hand GestureDocument6 pagesA Vision Base Application For Virtual Mouse Interface Using Hand GestureInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CSMA - CD Procedure Lecture NotesDocument3 pagesCSMA - CD Procedure Lecture Notestooba mukhtarNo ratings yet
- Name Hareem Fatima Roll Num El-021 Section D Second Year Electronics Im PresentationDocument4 pagesName Hareem Fatima Roll Num El-021 Section D Second Year Electronics Im Presentationtooba mukhtarNo ratings yet
- Guide To Points Directions PlanesDocument4 pagesGuide To Points Directions PlaneschurvaloooNo ratings yet
- Aloha Lecture Notes: FaadooengineersDocument3 pagesAloha Lecture Notes: Faadooengineerstooba mukhtarNo ratings yet
- Midterm Sol 2Document4 pagesMidterm Sol 2Babasrinivas GuduruNo ratings yet
- Transformer Note.Document54 pagesTransformer Note.Alfred OkacheNo ratings yet
- Allen Holberg SolutionsDocument509 pagesAllen Holberg SolutionsLatha Venkatesh100% (1)
- Basic MOSFET Logic Gates: 3.1 InverterDocument9 pagesBasic MOSFET Logic Gates: 3.1 Invertertooba mukhtarNo ratings yet
- Numerical Solutions of Non-Linear EquationsDocument35 pagesNumerical Solutions of Non-Linear EquationsJatinder KumarNo ratings yet
- Fitting Functions Through DataDocument30 pagesFitting Functions Through DataJohnnyNo ratings yet
- Fitting Functions Through DataDocument30 pagesFitting Functions Through DataJohnnyNo ratings yet
- Comparative Performance Analysis of XOR-XNOR Function Based High-Speed CMOS Full Adder Circuits For Low Voltage VLSI DesignDocument22 pagesComparative Performance Analysis of XOR-XNOR Function Based High-Speed CMOS Full Adder Circuits For Low Voltage VLSI DesignAnonymous e4UpOQEPNo ratings yet
- Crystallographic Directions and PlanesDocument10 pagesCrystallographic Directions and Planesradhika gulatiNo ratings yet
- MATH1070 3 Interpolation PDFDocument56 pagesMATH1070 3 Interpolation PDFbc170401540 MUHAMMAD SHAHIDNo ratings yet
- EE477 Homework Solutions Transmission Gate CircuitsDocument12 pagesEE477 Homework Solutions Transmission Gate Circuitstooba mukhtarNo ratings yet
- IJERD (www.ijerd.com) International Journal of Engineering Research and Development IJERD : hard copy of journal, Call for Papers 2012, publishing of journal, journal of science and technology, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, how to get a research paper published, publishing a paper, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, how to submit your paper, peer review journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, journal of engineering, online SubmisDocument5 pagesIJERD (www.ijerd.com) International Journal of Engineering Research and Development IJERD : hard copy of journal, Call for Papers 2012, publishing of journal, journal of science and technology, research paper publishing, where to publish research paper, journal publishing, how to publish research paper, Call For research paper, international journal, publishing a paper, how to get a research paper published, publishing a paper, publishing of research paper, reserach and review articles, IJERD Journal, How to publish your research paper, publish research paper, open access engineering journal, Engineering journal, Mathemetics journal, Physics journal, Chemistry journal, Computer Engineering, how to submit your paper, peer review journal, indexed journal, reserach and review articles, engineering journal, www.ijerd.com, research journals, yahoo journals, bing journals, International Journal of Engineering Research and Development, google journals, journal of engineering, online SubmisIJERDNo ratings yet
- Comparative Performance Analysis of XOR-XNOR Function Based High-Speed CMOS Full Adder Circuits For Low Voltage VLSI DesignDocument22 pagesComparative Performance Analysis of XOR-XNOR Function Based High-Speed CMOS Full Adder Circuits For Low Voltage VLSI DesignAnonymous e4UpOQEPNo ratings yet
- Low Complex System For Levitating Ferromagnetic Ma PDFDocument15 pagesLow Complex System For Levitating Ferromagnetic Ma PDFtooba mukhtarNo ratings yet
- Simulink Blocks and Control System ParametersDocument1 pageSimulink Blocks and Control System Parameterstooba mukhtarNo ratings yet
- Live View Car Surveillance System: Abstract-Today We Are Living in The 21st Century WhereDocument5 pagesLive View Car Surveillance System: Abstract-Today We Are Living in The 21st Century Wheretooba mukhtarNo ratings yet
- 3-PHASE INVERTER MODESDocument6 pages3-PHASE INVERTER MODESSureshkumar AlagarsamyNo ratings yet
- Robotic arms widely used in industries for precision and safetyDocument2 pagesRobotic arms widely used in industries for precision and safetytooba mukhtarNo ratings yet
- Applications of Robotics in Medicine: Paduri VeerabhadramDocument5 pagesApplications of Robotics in Medicine: Paduri Veerabhadramtooba mukhtarNo ratings yet
- LearnEnglish Writing B2 An Informal Email To A FriendDocument4 pagesLearnEnglish Writing B2 An Informal Email To A FriendAnonymous NNJXpMBNrNo ratings yet
- AddressDocument24 pagesAddressGia AliNo ratings yet
- Translation Mechanical System Transfer Function PDFDocument28 pagesTranslation Mechanical System Transfer Function PDFtooba mukhtarNo ratings yet
- Helping Hands Project ProposalDocument2 pagesHelping Hands Project Proposaltooba mukhtarNo ratings yet
- Translation Mechanical System Transfer Function PDFDocument28 pagesTranslation Mechanical System Transfer Function PDFtooba mukhtarNo ratings yet
- Transmission MediasDocument2 pagesTransmission Mediastooba mukhtarNo ratings yet
- NCR HistoryDocument2 pagesNCR HistoryAgam SehgalNo ratings yet
- All About Amps Vol 17Document27 pagesAll About Amps Vol 17Ale BouwmanNo ratings yet
- Multiple Choice Questions in Computer Science by Ela Kumar 28 PDFDocument3 pagesMultiple Choice Questions in Computer Science by Ela Kumar 28 PDFDeniseNo ratings yet
- Abbreviations, Acronyms and Common TermDocument28 pagesAbbreviations, Acronyms and Common TermyatishNo ratings yet
- MMS II AssignmentDocument2 pagesMMS II AssignmentAshwin RathodNo ratings yet
- Arduino Based Smart Glove PRO 2Document23 pagesArduino Based Smart Glove PRO 2faisal aminNo ratings yet
- Sony E-T-CON PCB For Television KDL-43W800C S0189585611Document5 pagesSony E-T-CON PCB For Television KDL-43W800C S0189585611supergasNo ratings yet
- Eagle - ManualDocument2 pagesEagle - ManualAldo SantosNo ratings yet
- Hundreds Gather in Clarke Quay For Spontaneous Countdown, Champagne Sprayed Into Crowd - Mothership - SG - News From Singapore, AsDocument1 pageHundreds Gather in Clarke Quay For Spontaneous Countdown, Champagne Sprayed Into Crowd - Mothership - SG - News From Singapore, AsZayar LwinNo ratings yet
- Shivaji Maharaj's Respect for WomenDocument12 pagesShivaji Maharaj's Respect for WomenCristi RonnieNo ratings yet
- Soapdoc2 PDFDocument197 pagesSoapdoc2 PDFCristian AndrioneNo ratings yet
- CV: Harini Saladi ViaDocument2 pagesCV: Harini Saladi ViaMosambe.comNo ratings yet
- Img 30Document1 pageImg 30Sonam BaghaNo ratings yet
- Updated Transformers Notes 6th Sem EEE CAEDDocument42 pagesUpdated Transformers Notes 6th Sem EEE CAEDdeepu kumarNo ratings yet
- Neil Landeen and Arizona Department of Public Safety Employee CoorespondenceDocument34 pagesNeil Landeen and Arizona Department of Public Safety Employee CoorespondenceForBlueNo ratings yet
- Driver DrowinessDocument20 pagesDriver DrowinessSruthi ReddyNo ratings yet
- 20 G 1 Anc 140 Aa 0 NNNNNDocument12 pages20 G 1 Anc 140 Aa 0 NNNNNWriterNo ratings yet
- Bresenhams Line Algorithm and Circle Generating MethodsDocument21 pagesBresenhams Line Algorithm and Circle Generating MethodsSOWMYANo ratings yet
- Website Subpoena Instructions 11.1.2019Document2 pagesWebsite Subpoena Instructions 11.1.2019Mark RiveraNo ratings yet
- MicroStrategy Education Course CatalogDocument61 pagesMicroStrategy Education Course Catalogelvis alexandrinoNo ratings yet
- DR8.21 ITIL Presentation Service TrainingDocument41 pagesDR8.21 ITIL Presentation Service TrainingKshitiz SaxenaNo ratings yet
- Majesco Limited: Insurance Tech Company ProfileDocument3 pagesMajesco Limited: Insurance Tech Company ProfileSanjay Kanchan PrajapatNo ratings yet
- Transferring Mat Type From R3 To GTSDocument20 pagesTransferring Mat Type From R3 To GTSAnandNo ratings yet
- It Era Final ModuleDocument103 pagesIt Era Final ModuleLeonso Visto JrNo ratings yet
- Chapter 24 Process ControlDocument36 pagesChapter 24 Process Controlavandetq15No ratings yet
- Digital ThermometerDocument28 pagesDigital ThermometerRajith SebastianNo ratings yet
- Connecting To Linux Using PuttyDocument9 pagesConnecting To Linux Using Puttydilip4682794No ratings yet
- ISC 2008 Computer Science Paper 1 TheoryDocument8 pagesISC 2008 Computer Science Paper 1 TheoryShadowerNo ratings yet
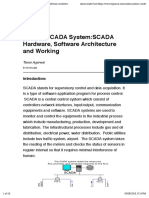
- What Is SCADA System-SCADA Hardware, Software Architecture and WorkingDocument10 pagesWhat Is SCADA System-SCADA Hardware, Software Architecture and WorkingMohd Ismail YusofNo ratings yet
- Controlling Routing Updates Traffic and Policy-Based Routing (PBR)Document22 pagesControlling Routing Updates Traffic and Policy-Based Routing (PBR)Sandro MeloNo ratings yet