You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FAQ Install An eCOM PartP Interface With DTS V8.06Document5 pagesFAQ Install An eCOM PartP Interface With DTS V8.06Dylan DYNo ratings yet
- CS1354Document6 pagesCS1354Manoj BhoyeNo ratings yet
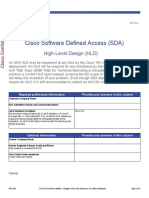
- Cisco Software Defined Access (SDA) : High-Level Design (HLD)Document49 pagesCisco Software Defined Access (SDA) : High-Level Design (HLD)Daniella ColmenaresNo ratings yet
- MOP UDM Deployment-22.8: AWS BasedDocument15 pagesMOP UDM Deployment-22.8: AWS BasedpraveensinghNo ratings yet
- Ac Datatypes ReferenceDocument56 pagesAc Datatypes ReferenceDavidNo ratings yet
- User Guide: Mk5 Gateway Module As Profibus InterfaceDocument27 pagesUser Guide: Mk5 Gateway Module As Profibus InterfaceErnesto Sta AnaNo ratings yet
- React Native GuideDocument31 pagesReact Native Guidedvirus2012No ratings yet
- User Manual RMC-v2 - 3Document26 pagesUser Manual RMC-v2 - 3carlosf_6No ratings yet
- 29F64G08CBAAA Micron PDFDocument159 pages29F64G08CBAAA Micron PDFMarcelo TrassiNo ratings yet
- V Cloud Point Zero Client User ManualDocument108 pagesV Cloud Point Zero Client User Manualkus satria dNo ratings yet
- Intel 8086 Microprocessor ArchitectureDocument12 pagesIntel 8086 Microprocessor ArchitectureYokito YamadaNo ratings yet
- Dell Inspiron N5110 Service ManualDocument45 pagesDell Inspiron N5110 Service ManualMichael Daniel Espinoza BetancoNo ratings yet
- Self Study Guidelines To JAVA SEDocument4 pagesSelf Study Guidelines To JAVA SEAnjana Jayasekara100% (1)
- Principles of Unix System Management - Solaris 8Document186 pagesPrinciples of Unix System Management - Solaris 8Venkateswara Reddy VNo ratings yet
- 16 Channel PWM Servo DriverDocument32 pages16 Channel PWM Servo DriverBAMELECTECH AUTOMATISME ELECTRICITE100% (1)
- 1 A Review On Internet of ThingsDocument11 pages1 A Review On Internet of ThingsTeddy IswahyudiNo ratings yet
- PDF Edne Nov 2013Document48 pagesPDF Edne Nov 2013torinomg100% (1)
- Technical Information: Stereo 20W (4 Digital Power Processing Technology TA2020-020Document13 pagesTechnical Information: Stereo 20W (4 Digital Power Processing Technology TA2020-020Tatang DevakaNo ratings yet
- Physics Investigatory Project: Mr. Shailendra Pratap Physics Teacher Nps International SchoolDocument4 pagesPhysics Investigatory Project: Mr. Shailendra Pratap Physics Teacher Nps International Schoolabhigyan priyadarshanNo ratings yet
- ABX00087 SchematicsDocument2 pagesABX00087 Schematicsdilip.sharma2005No ratings yet
- Android Mobile App Pentesting PDFDocument22 pagesAndroid Mobile App Pentesting PDFGihan AragãoNo ratings yet
- Unit-Iii Wireless Telecommunication Systems: GSM, GPRS, Umts, Satellite Systems, GPS, Lte/Wimax 2G, 3G, 4GDocument93 pagesUnit-Iii Wireless Telecommunication Systems: GSM, GPRS, Umts, Satellite Systems, GPS, Lte/Wimax 2G, 3G, 4GMerlin Linda GNo ratings yet
- NetScaler Release 10.5 TDMDocument41 pagesNetScaler Release 10.5 TDMRene van RoonNo ratings yet
- Technology Concepts1Document9 pagesTechnology Concepts1drosbeastNo ratings yet
- Rock Smith ConfigurationDocument20 pagesRock Smith ConfigurationRaúlÁlvarezMNo ratings yet
- Lab Manual LicDocument66 pagesLab Manual LicUppum Mulakam FansNo ratings yet
- JBL MRX612M Specsheet Eng 20140724Document2 pagesJBL MRX612M Specsheet Eng 20140724casefaNo ratings yet
- Operating System Lab ActivityDocument2 pagesOperating System Lab ActivityBernadette AycochoNo ratings yet
- Programming inDocument72 pagesProgramming inAKSHAYA COMPUTERS VEDASANDURNo ratings yet
- Chapter - 5 - v8.0 Network Layer - Control PlaneDocument107 pagesChapter - 5 - v8.0 Network Layer - Control PlaneTrần HoàngNo ratings yet