You might also like
- 2.10 QR Decomposition: Solution of Linear Algebraic EquationsDocument5 pages2.10 QR Decomposition: Solution of Linear Algebraic EquationsVinay GuptaNo ratings yet
- QR DecompositionDocument8 pagesQR DecompositionZahariea AndreiNo ratings yet
- Updating The QR Factorization and The Least Squares Problem (2008)Document73 pagesUpdating The QR Factorization and The Least Squares Problem (2008)Eran MaromNo ratings yet
- QrmethodDocument13 pagesQrmethodAshish MeenaNo ratings yet
- Loss and Recapture of Orthogonality in The Modified Gram-Schmidt AlgorithmDocument15 pagesLoss and Recapture of Orthogonality in The Modified Gram-Schmidt AlgorithmS.Abinith NarayananNo ratings yet
- QR DecompositionDocument10 pagesQR DecompositionthongloganNo ratings yet
- Approximating The Logarithm of A Matrix To Specified AccuracyDocument14 pagesApproximating The Logarithm of A Matrix To Specified AccuracyfewieNo ratings yet
- An Implicitly Restarted Block Arnoldi Method in A Vector-Wise FashionDocument10 pagesAn Implicitly Restarted Block Arnoldi Method in A Vector-Wise FashionHabita KadourNo ratings yet
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- Safe and Effective Determinant Evaluation: February 25, 1994Document16 pagesSafe and Effective Determinant Evaluation: February 25, 1994David ImmanuelNo ratings yet
- Reduction of A Symmetric Matrix To Tridiagonal Form - Givens and Householder ReductionsDocument7 pagesReduction of A Symmetric Matrix To Tridiagonal Form - Givens and Householder ReductionsAntonio PeixotoNo ratings yet
- Orthogonal Transformations: M, M 2 2 2 2 F F M M, NDocument12 pagesOrthogonal Transformations: M, M 2 2 2 2 F F M M, NP6E7P7No ratings yet
- Pade ApproximationDocument6 pagesPade ApproximationSaurabh AnmadwarNo ratings yet
- Krylov Subspace MethodsDocument8 pagesKrylov Subspace MethodsHabita KadourNo ratings yet
- Housholder TransformaciónDocument5 pagesHousholder TransformaciónJose Antonio Ramirez EscalanteNo ratings yet
- Math 243M, Numerical Linear Algebra Lecture NotesDocument71 pagesMath 243M, Numerical Linear Algebra Lecture NotesRonaldNo ratings yet
- HW 1Document6 pagesHW 1Morokot AngelaNo ratings yet
- Practice 6 8Document12 pagesPractice 6 8Marisnelvys CabrejaNo ratings yet
- ADA Unit-4Document28 pagesADA Unit-4gowdaveeresh494No ratings yet
- 4 QR Factorization: 4.1 Reduced vs. Full QRDocument12 pages4 QR Factorization: 4.1 Reduced vs. Full QRMohammad Umar RehmanNo ratings yet
- QR Factorization Chapter4Document12 pagesQR Factorization Chapter4Sakıp Mehmet Küçük0% (1)
- Binary SplittingDocument8 pagesBinary Splittingcorne0No ratings yet
- Savov NotesDocument4 pagesSavov NotesPritish PradhanNo ratings yet
- An Ecient Parallel Version of The Householder-QL Matrix Diagonalisation AlgorithmDocument14 pagesAn Ecient Parallel Version of The Householder-QL Matrix Diagonalisation AlgorithmShashi KantNo ratings yet
- Tools For Kalman Filter TunningDocument6 pagesTools For Kalman Filter Tunningnadamau22633No ratings yet
- Linear Algebra in Four PagesDocument4 pagesLinear Algebra in Four Pagesphyzics100% (1)
- NP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Document29 pagesNP-hard Problems and Approximation Algorithms: 10.1 What Is The Class NP?Aleksandr TerranovaNo ratings yet
- Symmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationDocument15 pagesSymmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationEDU CIPANANo ratings yet
- 5 - MatLab TutorialDocument3 pages5 - MatLab TutorialSimay OğuzkurtNo ratings yet
- Lec3 PDFDocument9 pagesLec3 PDFyacp16761No ratings yet
- Iterative Methods For Computing Eigenvalues and EigenvectorsDocument10 pagesIterative Methods For Computing Eigenvalues and EigenvectorsMauricio Rojas ValdiviaNo ratings yet
- 2 Denis Mosconi - RevisadoDocument8 pages2 Denis Mosconi - RevisadoDenis MosconiNo ratings yet
- 05 OrthogonalizationDocument36 pages05 OrthogonalizationAlexandru Daniel LacraruNo ratings yet
- hw8 Solns PDFDocument7 pageshw8 Solns PDFDon QuixoteNo ratings yet
- An Output Sensitive Algorithm For Computing A Maximum Independent Set of A Circle GraphDocument10 pagesAn Output Sensitive Algorithm For Computing A Maximum Independent Set of A Circle Graphnicholas_nash+123No ratings yet
- Notes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NDocument11 pagesNotes On Divide-and-Conquer and Dynamic Programming.: 1 N 1 n/2 n/2 +1 NMrunal RuikarNo ratings yet
- Cs421 Cheat SheetDocument2 pagesCs421 Cheat SheetJoe McGuckinNo ratings yet
- 10 Operation Count Numerical Linear AlgebraDocument7 pages10 Operation Count Numerical Linear AlgebraJeevan Jyoti BaliarsinghNo ratings yet
- Iterative Matrix ComputationDocument55 pagesIterative Matrix Computationnicomh2No ratings yet
- Example of Hessenberg ReductionDocument21 pagesExample of Hessenberg ReductionMohammad Umar RehmanNo ratings yet
- pr1 Soln PDFDocument6 pagespr1 Soln PDFRahulNo ratings yet
- 11.6 The QR Algorithm For Real Hessenberg Matrices: EigensystemsDocument8 pages11.6 The QR Algorithm For Real Hessenberg Matrices: EigensystemsVinay GuptaNo ratings yet
- A00 Final PracticeDocument4 pagesA00 Final PracticeTalha EtnerNo ratings yet
- Course Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraDocument8 pagesCourse Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraShwetabh SrivastavaNo ratings yet
- I Computing With Matrices: 1 What Is Numerical Analysis?Document19 pagesI Computing With Matrices: 1 What Is Numerical Analysis?Anonymous zXVPi2PlyNo ratings yet
- Linear Algebra Cheat SheetDocument2 pagesLinear Algebra Cheat SheettraponegroNo ratings yet
- Compressive Sensing: NotesDocument4 pagesCompressive Sensing: NotesCarmine ClementeNo ratings yet
- Nilpotent Adjacency Matrices and Random GraphsDocument16 pagesNilpotent Adjacency Matrices and Random GraphsMonireh VaNo ratings yet
- Lab Experiment - 5: Problem StatementDocument5 pagesLab Experiment - 5: Problem StatementthesovereignmoonloveNo ratings yet
- Higham, Nicholas J. 2011: Gaussian EliminationDocument10 pagesHigham, Nicholas J. 2011: Gaussian EliminationXzxz WahshNo ratings yet
- III Test DsaDocument50 pagesIII Test DsaRituparna Roy ChowdhuryNo ratings yet
- Brent ElementaryDocument10 pagesBrent ElementaryLovinf FlorinNo ratings yet
- Unit 3Document24 pagesUnit 3websurfer2002No ratings yet
- MIR2012 Lec1Document37 pagesMIR2012 Lec1yeesuenNo ratings yet
- Draft 1Document5 pagesDraft 1vidmarbrNo ratings yet
- Chapter 2: Quadratic ProgrammingDocument16 pagesChapter 2: Quadratic ProgrammingcartamenesNo ratings yet
- Lecture 16Document4 pagesLecture 16Neritya SinghNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- 5 TheLordsPrayerDocument1 page5 TheLordsPrayersibunquiNo ratings yet
- Magic Mirror. 2010.Document9 pagesMagic Mirror. 2010.sibunqui100% (1)
- Science Discovers The Silva MethodDocument36 pagesScience Discovers The Silva Methodsproto100% (12)
- Studying The Works of Yogi AkaDocument13 pagesStudying The Works of Yogi Akasibunqui100% (1)
- Graphic Organizer T-Chart CompletedDocument2 pagesGraphic Organizer T-Chart Completedapi-312390227No ratings yet
- Activity 3: Accumulation FunctionsDocument4 pagesActivity 3: Accumulation FunctionsteachopensourceNo ratings yet
- Applied Combinatorics PDFDocument393 pagesApplied Combinatorics PDFmarcelo100% (3)
- 11-10-20calculus 1 Guide - 2Document54 pages11-10-20calculus 1 Guide - 2SalihNo ratings yet
- Similarity Search On Time Series DataDocument37 pagesSimilarity Search On Time Series DataMehran RajabiNo ratings yet
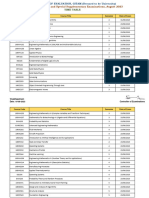
- Revised - Btech and Mtech Special Drive and Special Supplementary Exams Timetable Aug 2023Document14 pagesRevised - Btech and Mtech Special Drive and Special Supplementary Exams Timetable Aug 2023Kishore TadinadaNo ratings yet
- Simplex Economic InterpretationDocument34 pagesSimplex Economic InterpretationVinayak SinglaNo ratings yet
- Quantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Document5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Fabian M Vargas FontalvoNo ratings yet
- Example 2 Chapter 3 Solving Linear Simultaneous Equations by SubstitutionDocument3 pagesExample 2 Chapter 3 Solving Linear Simultaneous Equations by SubstitutionNakaiNo ratings yet
- Maths Mid Term MQP3-SolutionDocument14 pagesMaths Mid Term MQP3-Solutionvaishnav girish100% (1)
- Class Zone - Trigonometric Reference AnglesDocument7 pagesClass Zone - Trigonometric Reference AnglesDjemi SiswantoNo ratings yet
- Simplex Method Additional ActivityDocument3 pagesSimplex Method Additional ActivityIra Grace De CastroNo ratings yet
- Probability and StatisticsDocument415 pagesProbability and StatisticstaylorNo ratings yet
- Linear Systems SummaryDocument2 pagesLinear Systems SummaryFrantz ClermontNo ratings yet
- Systems of Linear Equations and Matrices: Shirley HuangDocument51 pagesSystems of Linear Equations and Matrices: Shirley HuangShu RunNo ratings yet
- Selected Solutions To Linear Algebra Done WrongDocument21 pagesSelected Solutions To Linear Algebra Done WrongasdfNo ratings yet
- WMA12 SampleDocument5 pagesWMA12 Samplejyf97ybqxyNo ratings yet
- Min/Max Problems and InequalitiesDocument3 pagesMin/Max Problems and InequalitiesOtávio José Dezem Bertozzi Jr.No ratings yet
- Mtahs FormulaeDocument3 pagesMtahs FormulaeWaseemHaiderSyedNo ratings yet
- 4.3 Euler's Method: Linear ApproximationDocument4 pages4.3 Euler's Method: Linear ApproximationJaden MoniezNo ratings yet
- NJC Math Apgp Lecture Notes Teachers EditionDocument18 pagesNJC Math Apgp Lecture Notes Teachers Editionbhimabi100% (1)
- Arithmetic Sequences: A N A A N ADocument2 pagesArithmetic Sequences: A N A A N AAndrea Mayer LlantoNo ratings yet
- 4.1 - 4.3 Quiz (2016)Document12 pages4.1 - 4.3 Quiz (2016)inizimijNo ratings yet
- Continuous Time Finance II: Lecture Notes: Prof. R Udiger Frey, Ruediger - Frey@wu - Ac.atDocument79 pagesContinuous Time Finance II: Lecture Notes: Prof. R Udiger Frey, Ruediger - Frey@wu - Ac.atDeniz MostaracNo ratings yet
- ChEtorials Integral CalculusDocument12 pagesChEtorials Integral Calculus23-07736No ratings yet
- Fisher Information and Cram Er-Rao Bound: Lecturer: Songfeng ZhengDocument12 pagesFisher Information and Cram Er-Rao Bound: Lecturer: Songfeng Zhengprobability2No ratings yet
- IntegralDocument213 pagesIntegralanantadiNo ratings yet
- Radiation IntegralsDocument22 pagesRadiation IntegralsrajeshadktNo ratings yet
- Chapter 2 (Derivatives)Document10 pagesChapter 2 (Derivatives)XXUnknownNo ratings yet