You might also like
- Delta Esr-48 56a C-V00Document2 pagesDelta Esr-48 56a C-V00Ela TorquataNo ratings yet
- Parallel Computing: Overview: John Urbanic Urbanic@psc - EduDocument34 pagesParallel Computing: Overview: John Urbanic Urbanic@psc - EduanjnasharmaNo ratings yet
- Cluster ComputingDocument28 pagesCluster ComputingVinayKumarSingh100% (6)
- Parallel, Cluster and Grid Computing: by P.S.Dhekne, BARC Dhekne@barc - Gov.inDocument92 pagesParallel, Cluster and Grid Computing: by P.S.Dhekne, BARC Dhekne@barc - Gov.inMohamed TallmanNo ratings yet
- Introduction To Parallel ProcessingDocument29 pagesIntroduction To Parallel ProcessingAzri Mohd KhanilNo ratings yet
- 24-25 - Parallel Processing PDFDocument36 pages24-25 - Parallel Processing PDFfanna786No ratings yet
- Cluster Computing: DATE: 28 November 2013Document32 pagesCluster Computing: DATE: 28 November 2013Hasan BadirNo ratings yet
- Cluster Computing: Shashwat Shriparv InfinitysoftDocument28 pagesCluster Computing: Shashwat Shriparv Infinitysoftshashwat2010No ratings yet
- Cloud Computing Unit - 3 FinalDocument43 pagesCloud Computing Unit - 3 Finalyuvarajy275No ratings yet
- Cluster ComputingDocument5 pagesCluster Computingshaheen sayyad 463No ratings yet
- SIMD ArchitectureDocument16 pagesSIMD Architecturebinzidd007100% (1)
- High Performance ComputingDocument61 pagesHigh Performance ComputingShrey Thakur100% (1)
- The Tera Computer SystemDocument6 pagesThe Tera Computer SystemJohn WestonNo ratings yet
- Programação Paralela e DistribuídaDocument39 pagesProgramação Paralela e DistribuídaMarcelo AzevedoNo ratings yet
- Chap2 Slides Week3Document28 pagesChap2 Slides Week3A NNo ratings yet
- Parallel ComputingDocument32 pagesParallel ComputingKhushal BisaniNo ratings yet
- Explicitly Parallel PlatformsDocument90 pagesExplicitly Parallel PlatformswmanjonjoNo ratings yet
- Advanced Computer Architecture: Mca - Tma CS-12Document11 pagesAdvanced Computer Architecture: Mca - Tma CS-12mrasadNo ratings yet
- Com 419 - CSD - Cat 2 2023Document5 pagesCom 419 - CSD - Cat 2 2023vimintiuasNo ratings yet
- Basics of Parallel Programming: Unit-1Document79 pagesBasics of Parallel Programming: Unit-1jai shree krishnaNo ratings yet
- Traing On HadoopDocument123 pagesTraing On HadoopShubhamNo ratings yet
- Computer Architecture - 2marks: 1) What Is The Need For Speculation? (NOV/DEC 2014)Document11 pagesComputer Architecture - 2marks: 1) What Is The Need For Speculation? (NOV/DEC 2014)Anonymous RdmReKNNo ratings yet
- HPC Lectures 1 5Document18 pagesHPC Lectures 1 5mohamed samyNo ratings yet
- Lecture 4 Network Topologies For Parallel ArchitectureDocument34 pagesLecture 4 Network Topologies For Parallel Architecturenimranoor137No ratings yet
- High Performance Computing On GpuDocument37 pagesHigh Performance Computing On GpuSushant SharmaNo ratings yet
- Flynn's Taxonomy: 1. SisdDocument7 pagesFlynn's Taxonomy: 1. SisdJaweria SiddiquiNo ratings yet
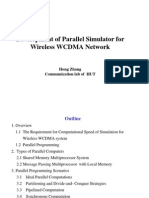
- Development of Parallel Simulator For Wireless WCDMA NetworkDocument23 pagesDevelopment of Parallel Simulator For Wireless WCDMA Networkegarciac77No ratings yet
- AOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - IDocument13 pagesAOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - ISujith Ur FrndNo ratings yet
- New Microsoft Word DocumentDocument14 pagesNew Microsoft Word Documentanji_ieteNo ratings yet
- Parallel ProcessingDocument22 pagesParallel Processingsouravmittal2023No ratings yet
- Technical Seminar Report On: "High Performance Computing"Document14 pagesTechnical Seminar Report On: "High Performance Computing"mit_thakkar_2No ratings yet
- Parallel and Distributed Algorithms-IMPORTANT QUESTIONDocument15 pagesParallel and Distributed Algorithms-IMPORTANT QUESTIONCHITRA MINI100% (1)
- Lectures On DSDocument8 pagesLectures On DSaj54321No ratings yet
- Stream Processors SeminarDocument29 pagesStream Processors SeminarSatyam DharNo ratings yet
- TaxonomiesDocument15 pagesTaxonomiesBoris DJIONGONo ratings yet
- P 1Document44 pagesP 1Bhabanath SahuNo ratings yet
- Parallel Computing IntroductionDocument36 pagesParallel Computing IntroductionajishalfredNo ratings yet
- Parallel ProgrammingDocument24 pagesParallel ProgrammingMarlon TugweteNo ratings yet
- Lecture 10 Parallel Computing - by FQDocument29 pagesLecture 10 Parallel Computing - by FQaina syafNo ratings yet
- Parallel I/O Systems and Interfaces For Parallel ComputersDocument35 pagesParallel I/O Systems and Interfaces For Parallel ComputersHarryAngNo ratings yet
- Advanced Computer ArchitectureDocument28 pagesAdvanced Computer ArchitectureSameer KhudeNo ratings yet
- Implementing Parallel Processing in Rugged Embeddable EnvironmentDocument6 pagesImplementing Parallel Processing in Rugged Embeddable EnvironmentMeharban SinghNo ratings yet
- Parallel and Distributed Algorithms: (PEC-IT 602 A)Document19 pagesParallel and Distributed Algorithms: (PEC-IT 602 A)Piyush GuptaNo ratings yet
- Introduction To Parallel Computing LLNLDocument44 pagesIntroduction To Parallel Computing LLNLAntônio ArapiracaNo ratings yet
- Chapter2 - CLO1 The Architecture and Algorithm DesignDocument81 pagesChapter2 - CLO1 The Architecture and Algorithm DesignmelvynNo ratings yet
- Hardware Accleration For MLDocument26 pagesHardware Accleration For MLSai SumanthNo ratings yet
- Unit VI Parallel Programming ConceptsDocument90 pagesUnit VI Parallel Programming ConceptsPrathameshNo ratings yet
- 02 - Parallel ProgrammingDocument27 pages02 - Parallel ProgrammingDd dNo ratings yet
- Multi-Core Processors: Page 1 of 25Document25 pagesMulti-Core Processors: Page 1 of 25nnNo ratings yet
- Module 1 - NewDocument59 pagesModule 1 - NewBantu AadhfNo ratings yet
- Foundation in Data Engineering Full NotesDocument39 pagesFoundation in Data Engineering Full NotesMoNo ratings yet
- External Memory Algorithms Using A Coarse Grained Paradigm: Apport de RechercheDocument21 pagesExternal Memory Algorithms Using A Coarse Grained Paradigm: Apport de Recherchemanuelq9No ratings yet
- Rehan Khan Roll No - 38Document23 pagesRehan Khan Roll No - 38hoda01No ratings yet
- Unit-7 Design Issues For Parallel Computers DefinitionDocument11 pagesUnit-7 Design Issues For Parallel Computers DefinitionSarbesh ChaudharyNo ratings yet
- Unit 7 - Parallel Processing ParadigmDocument26 pagesUnit 7 - Parallel Processing ParadigmMUHMMAD ZAID KURESHINo ratings yet
- The Tera Computer SystemDocument6 pagesThe Tera Computer Systemsike1977No ratings yet
- CUDA, Supercomputing For The Masses: Part 4: Understanding and Using Shared MemoryDocument3 pagesCUDA, Supercomputing For The Masses: Part 4: Understanding and Using Shared MemorythatupisoNo ratings yet
- CS0051 - Module 01Document52 pagesCS0051 - Module 01Ron BayaniNo ratings yet
- 01 Intro Parallel ComputingDocument40 pages01 Intro Parallel ComputingHilmy MuhammadNo ratings yet
- Introduction To ComputingDocument6 pagesIntroduction To ComputingChristopher AdvinculaNo ratings yet
- Chapter 5 Operational Amplifiers: Sung-Liang Chen VE215 Fall 2022Document68 pagesChapter 5 Operational Amplifiers: Sung-Liang Chen VE215 Fall 2022yi yang GuNo ratings yet
- Genie Z-30 20NDocument138 pagesGenie Z-30 20Nbernardo angeles rojasNo ratings yet
- Marine Electrical TechnologyDocument48 pagesMarine Electrical TechnologySaurabh Kumar ThakurNo ratings yet
- Important Definitions Total System Black Out: The Black Start Procedures Should Contain The Following Minimum DetailsDocument10 pagesImportant Definitions Total System Black Out: The Black Start Procedures Should Contain The Following Minimum DetailsashwiniNo ratings yet
- 6ny530012380 SRN-2Document10 pages6ny530012380 SRN-2Emir ErutNo ratings yet
- FXD Recloser EatonDocument16 pagesFXD Recloser Eatontri100% (2)
- STRONG SRT4356PVR Parts List, Service Manual PDFDocument41 pagesSTRONG SRT4356PVR Parts List, Service Manual PDFTim SmytheNo ratings yet
- Correspondence: Chang-Hong Hu, Qifa Zhou, Member, IEEE, and K. Kirk Shung, Fellow, IEEEDocument3 pagesCorrespondence: Chang-Hong Hu, Qifa Zhou, Member, IEEE, and K. Kirk Shung, Fellow, IEEEZafer OnanNo ratings yet
- Outdoor Unit Outdoor Unit: Transmission TrainingDocument139 pagesOutdoor Unit Outdoor Unit: Transmission TrainingAzher GhaziNo ratings yet
- Selection of Various Types of UPS (Part-2) - Electrical Notes & ArticlesDocument10 pagesSelection of Various Types of UPS (Part-2) - Electrical Notes & ArticlesRahul ItaliyaNo ratings yet
- Training Material of MS82CT ChassisDocument36 pagesTraining Material of MS82CT Chassisبوند بوندNo ratings yet
- Single Phase Fully Controlled ConverterDocument10 pagesSingle Phase Fully Controlled ConverterDeepu Chinna75% (4)
- IDocument29 pagesIaleksandar753No ratings yet
- Multiprocessor and Real-Time Scheduling: Bina Ramamurthy CSE421Document29 pagesMultiprocessor and Real-Time Scheduling: Bina Ramamurthy CSE421Magnus La CroixNo ratings yet
- Lab ManualDocument38 pagesLab ManualsruharithaNo ratings yet
- 100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeDocument12 pages100 Top Operational Amplifiers Questions and Answers PDF Operational Amplifiers Questions and Answers 1 PDF FreeJuan Carlos Chamalé Morales100% (1)
- LTE Planning PrinciplesDocument2 pagesLTE Planning PrinciplesusmanrNo ratings yet
- PB Modular Range UsDocument88 pagesPB Modular Range UselsalseritoNo ratings yet
- QA85Q60BAKXXV Disassembly & ReassemblyDocument11 pagesQA85Q60BAKXXV Disassembly & ReassemblysschematicNo ratings yet
- CUP IBChemistry c03 It BondingDocument59 pagesCUP IBChemistry c03 It BondingAdnan ChowdhuryNo ratings yet
- Vhf-Uhf TV ModulatorDocument4 pagesVhf-Uhf TV ModulatorBALT0DAN0No ratings yet
- Korg DS-1H Piano-Style Sustain Pedal With Half-Damper Control - SweetwaterDocument8 pagesKorg DS-1H Piano-Style Sustain Pedal With Half-Damper Control - SweetwaterJale SuGiNo ratings yet
- Ug470 7series Config PDFDocument180 pagesUg470 7series Config PDFabc789159No ratings yet
- PMT02 PALMERPRO Bedienungsanleitung EN DEDocument2 pagesPMT02 PALMERPRO Bedienungsanleitung EN DE丁海明No ratings yet
- Dynaguard LeafletDocument9 pagesDynaguard LeafletMarius HîrsescuNo ratings yet
- System Design NotesDocument3 pagesSystem Design Notesdolon100% (1)
- Safety Requirements in The Use of Cables and Insulated WiresDocument5 pagesSafety Requirements in The Use of Cables and Insulated WiresrocketvtNo ratings yet
- ASUS Laptop Catalogue !!!Document72 pagesASUS Laptop Catalogue !!!Himanshu KaushikNo ratings yet