0% found this document useful (1 vote)
3K views43 pagesAssembly Modeling
The document discusses assembly modeling in CAD systems. Key points include:
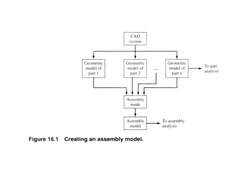
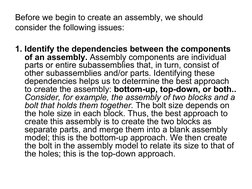
- Assemblies are composed of individual parts that can be modeled separately and then merged together in the assembly with spatial and mating relationships defined.
- The assembly hierarchy and mating conditions between parts must be specified to fully define how the assembly is constructed and the relationships between parts.
- Common mating conditions include coincident, concentric, coplanar, and others to define spatial relationships like faces lining up or axes aligning between parts.
Uploaded by
wadlanCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd
0% found this document useful (1 vote)
3K views43 pagesAssembly Modeling
The document discusses assembly modeling in CAD systems. Key points include:
- Assemblies are composed of individual parts that can be modeled separately and then merged together in the assembly with spatial and mating relationships defined.
- The assembly hierarchy and mating conditions between parts must be specified to fully define how the assembly is constructed and the relationships between parts.
- Common mating conditions include coincident, concentric, coplanar, and others to define spatial relationships like faces lining up or axes aligning between parts.
Uploaded by
wadlanCopyright
© Attribution Non-Commercial (BY-NC)
We take content rights seriously. If you suspect this is your content, claim it here.
Available Formats
Download as PPT, PDF, TXT or read online on Scribd