You might also like
- Control Escalar y VectorialDocument6 pagesControl Escalar y VectorialJesus Rosas MontalvoNo ratings yet
- Manual WinsammDocument0 pagesManual WinsammEduardo RockoNo ratings yet
- PalierDocument5 pagesPalierapi-26360100100% (2)
- Análisis de Anomalías en Variadores de FrecuenciaDocument32 pagesAnálisis de Anomalías en Variadores de Frecuenciajg_941No ratings yet
- Cámaras de Combustión PDFDocument21 pagesCámaras de Combustión PDFDavid Felipe Vargas OrtizNo ratings yet
- Tipos de Pastillas de FrenoDocument5 pagesTipos de Pastillas de FrenoMarcelo Alejandro Rea Castro100% (1)
- Curso Inyeccion Electronica Capitulo 2 - Instrumentos de Medicion - IDFLDocument26 pagesCurso Inyeccion Electronica Capitulo 2 - Instrumentos de Medicion - IDFLDaniel LamasNo ratings yet
- Montar Car-Audio en Cualquier CocheDocument7 pagesMontar Car-Audio en Cualquier Cochefransober100% (1)
- Tipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaDocument5 pagesTipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaFernando ToscanoNo ratings yet
- Bobinas de Ignición INFORMDocument3 pagesBobinas de Ignición INFORMalejandroNo ratings yet
- Reparacion de Mgnetron (Excelente)Document12 pagesReparacion de Mgnetron (Excelente)Antonio ChavezNo ratings yet
- Inyeccion MonopuntoDocument15 pagesInyeccion Monopuntofranci87100% (2)
- Sistema de Encendido Convencional Con Ayuda ElectronicaDocument15 pagesSistema de Encendido Convencional Con Ayuda ElectronicaCristian CadimaNo ratings yet
- 7 Osciloscopio DigitalDocument10 pages7 Osciloscopio Digitalomar_tunitec0No ratings yet
- Introduccion Al Sistema InverterDocument4 pagesIntroduccion Al Sistema InverterIsaac Valdiviezo100% (1)
- Electrónica BásicaDocument9 pagesElectrónica BásicaFranklin LalaleoNo ratings yet
- Cómo Probar Un TRIACDocument2 pagesCómo Probar Un TRIACingmario7100% (1)
- Sensor TemperaturaDocument5 pagesSensor Temperaturajhonatan sora cordobaNo ratings yet
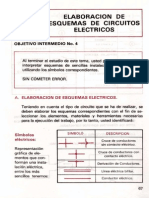
- Esquemas Circuitos ElectricosDocument8 pagesEsquemas Circuitos Electricosjuanka842No ratings yet
- Fuente de Alimentacion ReporteDocument13 pagesFuente de Alimentacion ReporteDante Martines MartinesNo ratings yet
- Encedido TransistorizadoDocument10 pagesEncedido TransistorizadoGalo PaúlNo ratings yet
- SISTEMA DE CARGA Y ARRANQUE Alternador Secion 4Document17 pagesSISTEMA DE CARGA Y ARRANQUE Alternador Secion 4Cesar Cauper CardenasNo ratings yet
- Sensor VSS CaracteristicasDocument1 pageSensor VSS CaracteristicasRicky SantiagoNo ratings yet
- Car Audio 2Document9 pagesCar Audio 2Mr SoundNo ratings yet
- Osiloscopio y Generador de FuncionesDocument40 pagesOsiloscopio y Generador de FuncionesFidel Angel Baquero Lagos100% (1)
- Tipos - de - Aceites - Del - Motor - de - Gasolina XD Jose MarceDocument30 pagesTipos - de - Aceites - Del - Motor - de - Gasolina XD Jose MarceMaría Belén Parada MamaniNo ratings yet
- Timer 555Document16 pagesTimer 555oapvNo ratings yet
- Distribución VariableDocument17 pagesDistribución VariableRonald EricesNo ratings yet
- SERVOFRENODocument18 pagesSERVOFRENOAndres SanizacaNo ratings yet
- Tabla Esr 1Document4 pagesTabla Esr 1silvertronicNo ratings yet
- Proyecto Rebobinado de Un Motor de Fase PartidaDocument13 pagesProyecto Rebobinado de Un Motor de Fase PartidaEINER WILLIAM ALA BALTZARNo ratings yet
- Medidor ESRDocument10 pagesMedidor ESRfrapers0% (1)
- Edwin - Viracocha - Cuestionario04 - La BateríaDocument5 pagesEdwin - Viracocha - Cuestionario04 - La BateríaEDWIN ALEXANDER VIRACOCHA SALAZARNo ratings yet
- Los ActuadoresDocument36 pagesLos Actuadoresantony hinostrozaNo ratings yet
- Hacer Luces EstroboscopicasDocument4 pagesHacer Luces Estroboscopicasdreyes3773No ratings yet
- Como Hacer Un Regulador de VoltajeDocument17 pagesComo Hacer Un Regulador de VoltajeinfornivoroNo ratings yet
- Como Hacer Un Probador de Sensor Abs de Efecto HallDocument3 pagesComo Hacer Un Probador de Sensor Abs de Efecto HallFelix Rafael Alvarado100% (1)
- Qué Es La ECUDocument6 pagesQué Es La ECUAbi BasualdoNo ratings yet
- Sistema Car Audio IDocument6 pagesSistema Car Audio Iareig7No ratings yet
- Introducción Al Motor BLDCDocument12 pagesIntroducción Al Motor BLDCsurflowersNo ratings yet
- Motor Limpiaparabrisas AutomotrizDocument34 pagesMotor Limpiaparabrisas AutomotrizBryan StevenNo ratings yet
- Ccs USBDocument27 pagesCcs USBMario Andres Caceres NoceraNo ratings yet
- Transductores - SensoresDocument10 pagesTransductores - Sensoresf48r1c10100% (2)
- Guia Rapida Multimetro-DigitalDocument12 pagesGuia Rapida Multimetro-DigitalIngeniero Miguel Buitrago100% (1)
- Circuitos Con ReléDocument4 pagesCircuitos Con ReléJoy TrianaNo ratings yet
- Ensamble Un Amplificador Monofónico de 100 WattsDocument24 pagesEnsamble Un Amplificador Monofónico de 100 WattsAbel JmcNo ratings yet
- Sensores y Actuadores Tema 1 PDFDocument9 pagesSensores y Actuadores Tema 1 PDFGtoyotar ChoqueNo ratings yet
- Conexión EstrellaDocument7 pagesConexión EstrellaJS Vargas TNo ratings yet
- Practica Circuito Operador, Operaciones Basicas, Control de Temperatura Analogico, FotoceldaDocument29 pagesPractica Circuito Operador, Operaciones Basicas, Control de Temperatura Analogico, FotoceldaMarco VazquezNo ratings yet
- Clase 1 CursoDocument42 pagesClase 1 CursoFederico Broitman100% (1)
- Direccion ElectricaDocument6 pagesDireccion ElectricaHéctor BoggioniNo ratings yet
- Cambio de Paso en Un Embobinado (Articulo)Document11 pagesCambio de Paso en Un Embobinado (Articulo)Alex Afc100% (1)
- Control ComputarizadoDocument15 pagesControl Computarizadoleticiazabala0% (1)
- Técnicas de Control para Motores BrushlessDocument5 pagesTécnicas de Control para Motores BrushlessAlex CadenaNo ratings yet
- Motores BLDCDocument35 pagesMotores BLDCRogelio Santiago León JapaNo ratings yet
- Motor Brushless ControlDocument15 pagesMotor Brushless ControlJersson EspinalNo ratings yet
- Propulsores C.A.Document60 pagesPropulsores C.A.Danny López100% (1)
- Motor BrushlessDocument6 pagesMotor BrushlessPato Guaraca83% (6)
- Teoria Servomotor V1 PDFDocument59 pagesTeoria Servomotor V1 PDFJuan Camilo Cortes Canchimbo100% (1)
- Resumen Servomotores y Motores Paso A PasoDocument9 pagesResumen Servomotores y Motores Paso A PasoBrandonMillanNo ratings yet
- Esta Di SticaDocument5 pagesEsta Di SticaMAXIMILIANO CONDOR HUAMÁNNo ratings yet
- Bombeo Hidraulico-PetroleoDocument32 pagesBombeo Hidraulico-PetroleoMayra AnzolaNo ratings yet
- Capacidad CalorificaDocument4 pagesCapacidad CalorificalorenaNo ratings yet
- Leyes de KirchhoffDocument2 pagesLeyes de KirchhoffĴesus MárquezNo ratings yet
- Prueba de MatematicaDocument13 pagesPrueba de MatematicajanierNo ratings yet
- H°P° Introduccion A PuentesDocument63 pagesH°P° Introduccion A PuentesMiguel Ángel Náva ChambiNo ratings yet
- NCH 204Document3 pagesNCH 204Camila ZuñigaNo ratings yet
- Normas, Recomendaciones y Certificaciones de Luminarias PDFDocument9 pagesNormas, Recomendaciones y Certificaciones de Luminarias PDFOmar GalarzaNo ratings yet
- Normas de AceroDocument9 pagesNormas de AceroEdwin Javier SierraNo ratings yet
- Geotecnia Taller 1Document44 pagesGeotecnia Taller 1eduardo100796No ratings yet
- Convertidor Pierce - SmithDocument4 pagesConvertidor Pierce - SmithWilliamEliezerCl100% (2)
- Manual de Instrucciones BD 260 Al 3000Document37 pagesManual de Instrucciones BD 260 Al 3000Romero AndradeNo ratings yet
- Sistema de Coordenadas TridimencionalesDocument5 pagesSistema de Coordenadas TridimencionalesDeejayAngelito MiXxNo ratings yet
- Practica 17 CaminoDocument35 pagesPractica 17 CaminoJose Andres Chaves CruzNo ratings yet
- Motor C.C (Tipo Shunt)Document14 pagesMotor C.C (Tipo Shunt)Reinaldo ChalbaudNo ratings yet
- Gamarra LJ PDFDocument161 pagesGamarra LJ PDFfreddy.sucuytana100% (1)
- Evaluación Estructural y Diseño de PavimentoDocument22 pagesEvaluación Estructural y Diseño de PavimentoLalo AnayaNo ratings yet
- Calculo de DerivadasDocument11 pagesCalculo de DerivadasALAN ALEXIS ORTIZ FARIASNo ratings yet
- Movimiento IrrotacionalDocument5 pagesMovimiento IrrotacionalEdixon SilvaNo ratings yet
- Guia - de - Practica - 4 - TceDocument39 pagesGuia - de - Practica - 4 - TceAlejandro Alberto Cano Mejia83% (6)
- Barrio Aleman Totalmente SustentableDocument4 pagesBarrio Aleman Totalmente SustentablePablo GutierrezNo ratings yet
- Proyecto Aerogeneradores Eoli FpsDocument12 pagesProyecto Aerogeneradores Eoli FpsjktaliaNo ratings yet
- Fisica 2Document4 pagesFisica 2Teodoro VillarrealNo ratings yet
- CATALISISDocument12 pagesCATALISISeduanllNo ratings yet
- ContenidoPracticoHidrologiaS1 2018Document1 pageContenidoPracticoHidrologiaS1 2018Elizabeth Fernandez100% (1)
- LlimaLabs - Vacuómetro Digital Con ArduinoDocument6 pagesLlimaLabs - Vacuómetro Digital Con Arduinofabio3055No ratings yet
- Propiedades Del Fluido de PerforacionDocument45 pagesPropiedades Del Fluido de Perforacioncedb1618100% (2)
- Arado de Vertebras y DiscosDocument14 pagesArado de Vertebras y DiscosLuís G. Moreno100% (1)
- 2 Presentación TécnicaDocument78 pages2 Presentación TécnicaMiguel Angel Romero FalconNo ratings yet
- Sistema Plunger LiftDocument14 pagesSistema Plunger LiftLUISNo ratings yet