i
FINALREPORT
MOX410
MACHINEGUNPROPELLERSYNCHRONISATION
DEVICE
by
RENIERMOOLMAN
StudentNumber: 29054452
Studyleader: MrF.Pietra
Dateofsubmission: 31May2013
18
UNIVERSITYOFPRETORIA
DEPARTMENTOFMECHANICALANDAERONAUTICALENGINEERING
DESIGNPROJECTMOX410
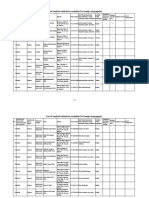
INTERNALandEXTERNALEVALUATIONSHEETEXAMINATION
DESIGNPROJECTMOX410:EVALUATIONSHEET Date:
Title:
Supervisor:
Student: Studentnumber:
ECSA Exit Level Outcome 3: Engineering design
M
a
x
m
a
r
k
C
o
m
b
i
n
e
d
Y
e
s
N
o
1 Is the student able to identify and formulate the problemto satisfy the user needs, applicable
standards, codes of practice and legislation?
15
2 Is the student able to plan and manage the design process and able to focus on important
issues recognizing and dealing with constraints?
10
3 Is the student able to acquire and evaluate the required knowledge, information and
resources, apply correct principles, evaluate and use design tools?
20
4 Can the student perform design tasks including analysis, quantitative modeling and
optimization?
20
5 Can the student evaluate alternatives and preferred solution, exercise judgment, test
implementability and perform techno-economic analysis (cost analysis, manufacturing
costs)?
20
6 Did the student take into account the impacts and benefits of the design: social, legal, health,
safety and environment?
15
Total for ELO 3 (subminimum of 50% to pass) 100
Is the student capable of performing procedural and non-procedural design and synthesis in order to solve an
engineering problem? if the answer is NO a mark of less than 50% must be awarded
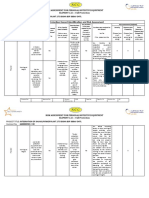
ECSA Exit Level Outcome 6: Professional and General
communication
M
a
x
m
a
r
k
C
o
m
b
i
n
e
d
Y
e
s
N
o
Final report (Written communication)
1 Did the student communicate the design logically can the reader follow the design detail
and methodology?
15
2 Was a literature study properly conducted and properly reported on and were the right
conclusions drawn fromthe literature and background study?
15
3 Is the report properly laid out, with proper language, grammar and general appearance?
10
4 Does the average reader understand the problemand why work was done?
10
5 Is everything defined and does the reader have a good idea what the research was all about?
10
6 Are sensible conclusions and recommendations made in the report?
10
Subtotal for Final report 70
Generated by CamScanner from intsig.com
ii
Abstract
Title: Machinegunpropellersynchronisationdevice
Author: R.Moolman
Studentnumber: 29054452
Studyleader: MrF.Pietra
Duringtheearlyyearsofaviation,aerialcombatwasveryprimitiveandineffective.Thiswasdueto
difficultiesmountingandfiringweaponsfromtheaircraft,especiallyforsingleseatedaircraft.
ThearrivaloftheFokkerEindeckerseriesofplanesrevolutionisedaerialcombat.TheFokkeraircraft
wereequippedwithmachinegunsthatcouldfirethroughthepropellerarcoftheaircraftwithout
hittingtheblades.Thisgavetheaircraftamassiveadvantageincombat,asitallowedthepilotto
aimaccuratelywhilefiring.
Thepurposeofthisprojectistoredesignandpossiblyimprovethesynchronisingmechanismthat
allowedtheoriginalpilotsearnthetitleofTheFokkerScourge.Theprojectentaileddoingextensive
researchontheoriginalplaneandthecomponentsitwasequippedwith.Detailsontheairframe,
engineandmachinegunhadtobeconsolidatedintoasinglepicturethatallowedthedesigntobeas
accurateaspossible.
Thesystemthatwasdevelopedwasmadetobeaslightaspossiblesoasnottoadverselyaffectthe
aircraftsmanoeuvringcapability.Thisbeingsaid,thecomponentswerestillmadestrongerthan
theyhadtobe,asamalfunctionincombatcouldhavefatalconsequencesforthepilot.
Manufacturingdrawingsforselectedcomponentsweredrawn,ofwhichtwoarebyhand.Thereport
alsoincludesafullassemblydrawing,detailingthepositionofeverypart,aswellasdrawings
generallydescribingeverypartinthesystem.
iii
Acknowledgements
Theauthorwouldliketothankthefollowingpeoplefortheirassistancethroughoutthisproject:
MrFPieta(StudyLeader)
MrNSmit(Manufacturingquoteandadvice,UniversityofPretoria)
MrWCMalan(Generaladvice)
MrHNash(Dennesengineering)
v
Contents
1. IntroductionandBackground.........................................................................................................1
2. ProblemStatementandObjective..................................................................................................3
3. UserRequirements.........................................................................................................................4
4. LiteratureStudy..............................................................................................................................5
4.1TheFokkerEindeckerAirplanes....................................................................................................5
4.1.1AQuickHistoryoftheEindeckers..........................................................................................5
4.1.2Basicaircraftstatistics............................................................................................................6
4.2Powerplant....................................................................................................................................6
4.3Armament.....................................................................................................................................8
4.3.1Ammunition...........................................................................................................................8
4.3.2Firingrate...............................................................................................................................8
4.3.3Positioning..............................................................................................................................9
4.3.4Onboardammunition..........................................................................................................10
4.3.5Trigger..................................................................................................................................10
4.3.6PilotsTrigger.......................................................................................................................11
4.4Airframe......................................................................................................................................12
4.5WorldWar1ManufacturingCapabilities...................................................................................13
4.5.1Measurement.......................................................................................................................13
4.5.2MillingMachines..................................................................................................................13
4.5.3Lathe....................................................................................................................................13
4.6MaterialResearch.......................................................................................................................14
4.6.1BushMaterial.......................................................................................................................15
4.7CamDesign.................................................................................................................................15
4.7.1FollowerTypes.....................................................................................................................15
4.7.2CamClassifications...............................................................................................................15
4.7.3CamFollowerMotion..........................................................................................................16
4.7.4GraphicalCamProfileLayout...............................................................................................16
4.7.5CamNomenclature..............................................................................................................16
4.7.6CamMotionCurves..............................................................................................................17
4.7.7Camfollowerconstraint.......................................................................................................19
5. FunctionalAnalysis........................................................................................................................20
5.1SystemlevelDiagram..................................................................................................................20
5.2MissionLevelDiagram................................................................................................................20
vi
5.3FunctionalDiagrams...................................................................................................................21
5.4DesignParametersperFunction.................................................................................................22
6. DesignRequirements/Technicalspecifications...........................................................................23
7. Conceptgenerationandevaluation..............................................................................................24
7.1Principleofoperation.................................................................................................................24
7.2Obtainingmovementfromtheengine.......................................................................................24
Bevelgearcrank............................................................................................................................24
Bevelgearcam..............................................................................................................................25
Directcam.....................................................................................................................................25
Evaluation.....................................................................................................................................25
7.3Engagingthetriggermechanism................................................................................................26
Torsionalspringlever....................................................................................................................26
Torsionalspringlever2.................................................................................................................27
Swinginglink.................................................................................................................................27
Evaluation.....................................................................................................................................28
7.4ConceptRefinement...................................................................................................................28
FirstAttempt.................................................................................................................................28
SecondAttempt............................................................................................................................28
7.5InitialDrawings...........................................................................................................................30
7.5EngagingtheTrigger...................................................................................................................31
Solidlinkage..................................................................................................................................31
PulleySystem................................................................................................................................31
8. DetailDesign.................................................................................................................................32
Basicsystemfunctionality.................................................................................................................32
8.1DrawingtheFrame.....................................................................................................................33
8.2DefiningtheMotion....................................................................................................................34
8.3Locatingthemechanism.............................................................................................................35
8.3.1Mountingpoints...................................................................................................................35
8.3.2OffCentreMounting...........................................................................................................36
8.3.3MountingBracket................................................................................................................36
8.4DesigningtheBasePlate.............................................................................................................36
8.4.1SecuringtheBasePlate........................................................................................................37
8.5JournalBearingHousing.............................................................................................................37
8.6RodEndsandConnectingRod....................................................................................................37
vii
8.3Calculatingthedistances............................................................................................................39
8.3.1Calculatebforachosena....................................................................................................40
8.3.2Iteration...............................................................................................................................40
8.4Camdesign..................................................................................................................................42
8.4.1GoverningEquations............................................................................................................42
8.4.2DimentionalisingtheValues................................................................................................44
8.4.3SolvingtheEquations...........................................................................................................44
8.4.4.DeterminingtheSpringConstant.......................................................................................46
8.4.5DrawingtheCam..................................................................................................................46
8.4.6Mountingthecamtotheengine.........................................................................................46
8.4.7BalancingtheCam...............................................................................................................46
8.5SynchronisingtheBulletMotion.................................................................................................47
8.5.1DeterminingtheDistances...................................................................................................47
8.5.2DeterminingtheTime..........................................................................................................48
8.6Connectingthesystemtothepilotstrigger..............................................................................53
8.7SafetyMechanism.......................................................................................................................53
8.8FiniteElementAnalysis...............................................................................................................54
8.8.1PartstoAnalyse...................................................................................................................54
8.8.1ANSYS...................................................................................................................................54
8.8.2Meshing................................................................................................................................54
8.8.3BoundaryConditions............................................................................................................56
8.8.4Deformation.........................................................................................................................56
8.8.5Stress....................................................................................................................................57
8.9Weightofthesystem..................................................................................................................58
9. Maintenance.................................................................................................................................59
9.1Procedurebeforetakeoff..........................................................................................................59
9.2Procedureafterlanding..............................................................................................................59
10. CostAnalysis.............................................................................................................................60
11. ManufacturingSchedule...........................................................................................................61
11.1Journalbearingmanufacturing.................................................................................................61
11.2Engagerrodmanufacturing......................................................................................................62
12. QualificationRequirements......................................................................................................63
13. Conclusion.................................................................................................................................65
14. References................................................................................................................................66
viii
15. AppendixA:MatlabPrograms..................................................................................................68
SliderCrankCalculator.....................................................................................................................68
Camdesigncalculator.......................................................................................................................68
16. AppendixB:MachiningQuote..................................................................................................70
17. AppendixC:Handdrawnmanufacturingdrawings..................................................................73
18. AppendixD:CADmanufacturingdrawings...............................................................................76
19. AppendixE:AssemblyDrawings...............................................................................................79
20. AppendixF:Allcomponents.....................................................................................................83
ix
ListofFigures
Figure1TheFokkerEindeckerIIIorEIII..................................................................................................1
Figure2FokkerEIIIinpaintedinturkishcolours(brannon1996)..........................................................5
Figure3aneiiiduringconstruction........................................................................................................6
Figure4OberurselUR1motor(ArizonaModelAicraftersn.d.).............................................................7
Figure5aRarephotofromthecockpitofanEIIi(grosz1989)..............................................................9
Figure6PositionoftheLMg08/15inrelationtothecockpitandengine(ArizonaModelAicrafters
n.d.).......................................................................................................................................................10
Figure7StandardlightenedSpandau...................................................................................................11
Figure8AreproductionEIIIcockpit(Aten&Engels2002)...................................................................11
Figure9DetailednosesectionoftheEIII.............................................................................................12
Figure10Camfollowertypes(rothbart2004).....................................................................................15
Figure11Differenttypesoffollowermotion(Rothbart2004)............................................................16
Figure12CamNomenclature(Rothbart2004)....................................................................................16
Figure13Constantvelocitycamcurve.................................................................................................17
Figure14ModifiedTrapezoidalcurve(Rothbart2004).......................................................................18
Figure15Modifiedsinecurveandthestandardcycloidalcurve.........................................................18
Figure16Systemleveldiagram............................................................................................................20
Figure17MissionLevelDiagram..........................................................................................................20
Figure18Systemlevelfunctionaldiagram...........................................................................................21
Figure19InitialCADdrawing................................................................................................................30
Figure20Triggerengagingconcept......................................................................................................31
Figure21Cabletriggerengagingconcept............................................................................................31
Figure22tHECOMPLETEMECHANISMANDFRAME...........................................................................32
Figure23TheFokkerEIIInoseframe....................................................................................................33
Figure24Deteminingthemovementofthetrigger.............................................................................34
Figure25SectionViewoftheairframeshowingmountingpoints......................................................35
Figure26BasePlate..............................................................................................................................36
Figure27Journalbearinghousing........................................................................................................37
Figure28Basicslidercrankmechanism...............................................................................................37
Figure29Pipewithtworodends.........................................................................................................38
Figure30Distancesbetweenmountingpoints....................................................................................39
Figure31Modifieddistancesfortheslidercrank................................................................................39
Figure32SliderCrank...........................................................................................................................40
Figure33Themodifiedsinecurve(Rothbart2004).............................................................................42
Figure34GunBreechandbarrelstart..................................................................................................47
Figure35Barrellength..........................................................................................................................47
Figure36Oberurselenginewithdimensions.......................................................................................48
Figure37Relativedistancesbetweenpropellerandgun....................................................................48
Figure38ThrustCalculations(NASAn.d.)............................................................................................50
Figure39Movementofpropellerasbulletpassesthroughit.............................................................53
Figure40PartsselectedforFEA...........................................................................................................54
Figure41TotalMesh............................................................................................................................55
Figure42Meshonthefrontsection....................................................................................................55
x
Figure43Meshontherearside...........................................................................................................55
Figure44Totaldeformationplot..........................................................................................................56
Figure45Totaldeformationplot,differentangle................................................................................56
Figure46vonMisesstressplot1..........................................................................................................57
Figure47vonMisesstressplot2..........................................................................................................57
Figure48vonMisesstressplot3..........................................................................................................58
Figure49JournalBearing.....................................................................................................................61
Figure50Engagerrod...........................................................................................................................62
xi
ListofTables
Table1Spandauammunitionattributes................................................................................................8
Table2PropertiesofAisi4130Steel....................................................................................................14
Table32017T4Aluminiumspecifications...........................................................................................14
Table4Anglesofrotationforlinka=30mm.........................................................................................41
Table5Anglesofrotationforlinka=40mm........................................................................................41
Table6Angleofcamrotationandtheassociatedrise.........................................................................45
Table7Attributesofa154grainspitzerbullet....................................................................................49
Table8Hourlyratesformanufacturing................................................................................................60
xii
ListofSymbols
FEA Finiteelementanalysis
hp horsepower
rpm revolutionsperminute
a
R radiusoftheprimecircleofacam
b
R radiusofthebasecircleofacam
p
R radiusofthepitchcircleofacam
y displacementformthebasecircle
' y nondimentionalisedvelocityofthefollower(firstderivativeofy)
'' y nondimentionalisedaccelerationofthefollower(secondderivativeofy)
''' y nondimentionalisedjerkofthefollower(thirdderivativeofy)
y followervelocity,m/s
y followeracceleration,m/s
2
y followerjerk
2
O originofaslidercrankmechanism
a linkrotatingaboutpoint
2
O inaslidercrank,m
b middleconnectinglinkinaslidercrank,m
c verticaloffsetinaslidercrank,m
d horizontaldistancefromtheorigininaslidercrank,m
2
u anglebetweenthehorizontalaxisandlink a ,measuredcounterclockwise,radians
3
u anglebetweenthehorizontalaxisandlink b ,measuredcounterclockwise,radians
| angleittakesforacamtocompleteitsrise,radians
u angleofrotationofacam,measuredfromthepoint | isreferenced,radians
e angularvelocityofacam,rad/s
d A
distancemoved,m
xiii
f
v
finalvelocity,m/s
i
v
Initialvelocity,m/s
t A timeelapsed,s
thp thrusthorsepower
I
T thrust,lb
0
V velocity,ft/sorm/s
bhp brakehorsepoweroftheengine
p
q propellerefficiency
e
V exitvelocity,m/s
SD sectionaldensity
i formfactorofabullet
g
C referencedragcoefficient
1. IntroductionandBackground
During the First World War (WWI), aviation was in a fledgling state. The war broke out barely a
decade after the Wright brothers made their historic first flight in 1903 in North Carolina. At the
beginningof thewar,aerialcombatwasscarcelypossible.Theplaneswerebarelyableto maintain
steadyflightandweremainlyusedforreconnaissance.
Itwasnotlongbeforepilotsstartedbattlingeachotherforairsuperiority.On1April1915,aFrench
pilotnamedRolandGarrosshotdownaGermanAlbatrosplane.Thiswasnotthefirstairtoairkill,
but Garros plane was the first plane that was modified for aerial combat (Century of Flight n.d.).
Garroshadmodifiedhisplanebyattachingmetaldeflectorplatestothepropellerofhisplane.This
allowed him to fire a machine gun through the propeller disk, allowing the machine gun to be
mounted ahead of him and making aiming easier. Garros was eventually taken prisoner by the
Germanswhenhewasforcedtolandintheirterritoryandhisplanefellintoenemyhands.
FIGURE1THEFOKKEREINDECKERIIIOREIII
Once the Germans saw the modifications that Garros had made to his propeller, they saw an
opportunity to gain total air superiority. They gave Anthony Fokker the task of refining the idea of
firing a machine gun through the propeller disk. In a short time, the brilliant engineer designed an
elegant mechanismthatallowedthemachine gun tofirethroughthepropellerdiskwithouthitting
theblades.
This revolutionary invention was installed on the Fokker Eindecker planes. These planes ruled the
skieswhentheywerefirstintroducedandwerenamedtheFokkerScourge,flownbyfamousaces
likeImmelmanandBoelcke(CenturyofFlightn.d.).
2
The ability to conduct effective aerial combat was made possible by Anthony Fokker and his
synchronisation mechanism. This led to the rapid development of aircraft due to their strategic
military importance, changing the face of war and in turn allowing aircraft developments to
influencecivilianlifeafterthewar.
3
2. ProblemStatementandObjective
Theproblemposedforthisprojectisthatthereisnoeffectivewayoffiringamachinegunthrough
thepropellerdiskofaplane.ThesolutionthatwasseenonGarroscapturedplanewasnoteffective
andverycrude.Thisprojectaimstodevelopawayoffiringamachinegunthroughthepropellerdisk
withouthittingtheblades,thesametaskthatAnthonyFokkerwastaskedwithin1915.
Since the project is set in 1915, only time available technology can be used. Materials such as
plasticsandcarbonfibrewerenotavailableatthetimeandarethusnottobeused.Theprojectwill
not, however, conduct in depth research on manufacturing capabilities of the time, as research in
itself is not the ultimate goal of the project. Concrete historical information will be used wherever
possible,wherenodetailedinformationisavailable,assumptionsbasedonavailableinformationwill
bemadeandstatedclearly.
Thescopeofthedesignitselfwillnotincludethemachinegunitselfortheengineandpropeller,but
ratherthemechanismthatwillsynchronisethetwoofthem.
At the end of the project, the complete mechanism will be presented in an assembly drawing. In
addition to this assembly drawing, all of the components drawings will be given with their
dimensions as well as two selected hand drawings with manufacturing details. The hand drawings
thataredonehavetobeofastandardthatadraftsmancandrawuppropermanufacturingdrawings
fromthem.
Two of the components will be analysed in depth, while the rest will be designed on a more
superficiallevel.ThetwoselectedcomponentswillbeevaluatedeithernumericallyorthroughFinite
ElementAnalysis(FEA).
3. UserRequirements
According to the user requirements, a device or mechanism has to be designed that synchronises
themachinegunwiththepropeller.Theparametersaccordingtowhichthisisdonearequitesimple
innature.Themechanismhasto:
- Connectthepilotsfirebuttontothemachineguntrigger
- Ensurethatthebulletsdonothitthepropellerblades
- Beaslightaspossible
- Incorporateasafetymechanismthatpreventsfiringaltogether
- Havealifetimeequaltotheexpectedlifeoftheairplane
5
4. LiteratureStudy
4.1TheFokkerEindeckerAirplanes
The Fokker Eindecker variant airplanes first appeared over the battlefield in June of 1915. The
synchronised machine gun firing through the propeller disk caught the Allies by complete surprise
and gave birth to a new breed of warrior: the fighter ace. In order to design the synchroniser
mechanism for this project, it is first necessary to unearth details of this plane that helped shape
history.
FIGURE2FOKKEREIIIINPAINTEDINTURKISHCOLOURS(BRANNON1996)
4.1.1AQuickHistoryoftheEindeckers
The Fokker Eindecker range of planes originally started life as highly manoeuvrable scout planes.
TheyweresimilarinmanywaystotheFrenchMoraneSalnier(H)plane,atleastinappearance.The
planeswere poweredbyrotaryengines(not tobe confusedwiththeWankel rotaryengine).These
engines operated by having the crankshaft fixed to the aircrafts motor mounts, while the engine
itselfrotates.Thepropellerisboltedtotheenginecasingandthetworotateatthesamespeed.
Fromtheverybeginningofthewar,thepilotsonbothsidesfiredateachotherfromtheircockpits
usingpistolsandrifles.Somepilotseventriedtodrophandgrenadesoneachother.Thisescalated
to the point where the planes needed armament in order to defend themselves, as well as ridding
theskiesofenemyscouts.Mostoftheearlyplaneshadacrewoftwo(pilotandobserver)andboth
sidesmountedmachinegunsbehindthecockpitthattheobservercouldfireattheenemy.
TheFrenchescalatedthisarmsracebymountinggunsnexttothefuselagethatfiredpassedtheside
of the propeller arc. The gun at this position was nearly inaccessible to the pilot, yet German air
lossesincreaseddramatically.Asmentioned,RolandGarrosfittedbulletdeflectorsonhispropeller,
enablinghimtofireaFrenchHotchkissmachinegunthroughthepropellerarc.Garroswasbrought
down in German territory by engine trouble and the idea of firing a gun through the propeller arc
wasgiventotheGermans.
Anthony Fokker was presented the problem of firing the machine gun through the propeller arc
without hitting the propeller. Not long after, the Fokker Company delivered an aircraft to the
German High Command fitted with the synchroniser and a Parabellum machine gun. This plane
would later be designated as the Fokker E1. This is written according to the account of Brannon
(1996).
6
Barely 2 months after the Fokker E1 claimed its first kill, the EIII appeared on the battlefield. The
introduction of the EIII changed the role of the Eindecker from reconnaissance to that of an
offensive fighter. The EIII featured a more powerful, more reliable power plant. It also had a
redesignedcockpit,builtforonepersonwithnoroomforanobserver.TheEIIIwasinproductionfor
abouttwelvemonths.
4.1.2Basicaircraftstatistics
InMay1916,acapturedEIIIwastestedattheBritishUpavonfacility.Thefollowingdataisextracted
fromareportonthattestandwassummarisedbyBrannon(1996):
Characteristic Value
Mainfueltank 98litres
Reservefueltank 22litres
Oiltank 25litres
Flyingtime 1hour17minutes*
Enginerevs 1140rpminair,1180onground
Averageairspeed 115km/h
Maximumairspeed 139km/h
Maximumrecordedenginespeed 1210rpm
*Grosz(1989)notedflighttimeof2hours30minutes,thoughthislikelyincludedthereservetanks
fuel
4.2Powerplant
The Fokker EIII was powered by a German Built Oberursel UR1 100 horsepower (hp) or 74.57 kW
motor. The Oberursel engine was a near exact copy of the French Gnome Delta engine and was
producedunderlicensefromGnomebyOberurselMotorenGesellschaft.
The UR1 was a rotary engine. These engines were very different from the engines that are used
today. Where modern engines have the fixed engine turning a crankshaft, rotary engines are the
opposite. The crankshaft of a rotary engine is fixed to the airframe, while the entire body of the
enginerotates.Thisactionassistsincoolingtheengine,whichhasfinsoneachofits9cylinders.
FIGURE3ANEIIIDURINGCONSTRUCTION
The air intakes for the cylinders are at the top of the cylinder, the end farthest away from the
centre of the engine. The valves are opened by the cam rods, indicated by the arrow in Figure 3.
Because the air intakes were at the ends of the cylinders and were opened by the cam rods, there
was no way for the pilot to control the air intake. This meant that the pilot also had little to no
controloverthethrottle.Theonlycontrolthepilothadoverthefuelflowwaschoosingtherichness
ofthemixture.Therichnessofthemixturereferstotheratiooffueltoairinthecylinders.Thusthe
engine was always operating at the same rotational speed, or as near as the same it makes no
matter.
Theonlywaythepilotcouldcontroltheenginespeed,wastobliptheengine.Thiswasdonebya
button in the cockpit. The blip button cut the engine completely while it was pressed. Due to the
engineshighrotationalinertia,itkeptrotatingforawhileaftertheenginewascut.Ifthepilotthen
released the blip button, the engine resumed ignition. This function was only used during landing,
however.
Itcanthusbesaidthattheenginealwaysoperatedinaverynarrowrevolutionrangeduringcombat,
asfastasair resistanceallowedit.When theallies testedacapturedEIII, thehighestenginespeed
recordedwas1210rpm(Brannon1996).Thiswastheonlycrediblesourcethatwasfoundgivingthe
engine speed. Other mentions were found on forums gave roughly the same information, though
informationfromforumsisnotcredible.
FIGURE4OBERURSELUR1MOTOR(ARIZONAMODELAICRAFTERSN.D.)
Figure 4 is one of the few images of the Oberursel engine that could be found that included
measurements. In general, accurate information on the Oberursel engine is very scarce. The vast
majorityofinformationavailablereferstotheGnomeDelta,onwhichtheengineisbased.Thereare
differences between the two engines, though all indications are that these differences are mostly
internalandtheexternaldimensionsarethesame.
The EIII was fitted with a simple 2 blade wooden propeller. This means that the machine gun will
havealmost180ofpropellermotioninordertofireabulletthroughthepropellerarc.
8
4.3Armament
Accordingtovarioussources,theFokkerEIIIwasarmedwithaMaximMG08(Maschinengewehr08)
machinegunvariant.ThestandardMaximMG08machinegunhadawaterjacketedbarrel,weighed
26kgandrequireda31 kgfieldmountwitha crew ofthreepeople (TheVintageAviatorn.d.). The
waterjacketedbarrelrequiredareservoirthatneededconstantreplenishmentinordertocoolthe
gun.
The LMG 08/15 that was fitted to the Fokker EIII was a lightened version of the MG08. The water
cooled barrel inappropriate for aerial combat. The standard water jacket was perforated with slots
alongitslength.Thisallowedincreasedareaforairflowtocoolthebarrelinflight,whilststilllending
stabilitytothebarrelsoastokeepitsaccuracy.WhentheLMG08/15wasinstalledontheEIII,the
weighthadbeenreducedto11.8kg.
TheLMG08/15wereallmanufacturedattheSpandauArsenal.TheArsenalmadeitsimprintonthe
FuseecoverofthegunandthegunbecameknownastheSpandautotheallies.Thenameisstill
usedtodaytorefertothisvariantoftheMaximMG08
4.3.1Ammunition
TheSpandaumachinegunfiredasteeljacketed7.92mmx57cartridge.Table1belowisanexcerpt
fromalargertableinabookbyPopenkerandWilliams(2008)anddescribesthecartridgefiredby
theSpandau
TABLE1SPANDAUAMMUNITIONATTRIBUTES
Metric
Calibre
Bullet
Diameter
(mm)
Rim
Diameter
(mm)
Body
Diameter
Bullet
type/weigh
tgrains
Muzzle
velocity
(m/s)
Muzzle
energy
(kJ)
7.92x57 8.07(RN)
8.20(S)
11.88 11.88 226(RN)
154(S)
637.03
853.44
2.98
3.65
WithreferencetoTable1,RNstandsforroundnose,SforSpitzer.Aspitzerroundisabulletwitha
sharperpoint,abletoachievehighervelocities,asseeninTable1.Thespitzerroundwastheround
primarilyusedbytheGermansduringWWI.ThemajorityoftheSpandaugunslikelyusedthisvariant
oftheammunition(Williams2009).
4.3.2Firingrate
ThereportedfiringratefortheSpandauLMG08/15variesfromsourcetosource.Thereasonforthis
is likely one of two causes: the means of determining the firing rate was not consistent between
varioustestsandthegunswerenotallidenticalandhadsomevarianceinfiringrates.
Variousaccountsonwebsites(TheVintageAviatorn.d.,MilitaryFactoryn.d.)relaythefiringrateas
somewhere between 400500 rounds per minute. This depended on the variant of the gun and
whether it was fitted with a muzzle booster that improved the rate of fire. Brannon (1996)
mentions that Henri Hegener put the firing rate of the Maxim 08 and 08/14 at 600 rounds per
minute. Brannon (1996) says that a direct quote from Sir Hiram Maxim gave the firing rate as 450
rounds per minute; he does however use 600 rounds per minute as a reference in the rest of his
book. The increased firing rate is likely due to the addition of the muzzle booster, which was
9
reported to improve the firing rate by up to 45% (Military Factory n.d.). If this 45% increase is
factoredintoSirHiramMaximsclaimof450roundsperminute,thefiringratewouldhavebeen652
rounds per minute. Thus it can be safely assumed that the Spandau could fire 600 rounds per
minute,asHenriHegenerstatedinBrannonsbook.
4.3.3Positioning
Themachinegunwaspositionedinfrontofthecockpit,slightlyoffcentretotheright.Theposition
was so that the pilot could see ahead of him, while easily aiming down the sights during combat.
Figure5showsapictureofthecockpitofanEIII.
FIGURE5ARAREPHOTOFROMTHECOCKPITOFANEIII(GROSZ1989)
10
FIGURE6POSITIONOFTHELMG08/15INRELATIONTOTHECOCKPITANDENGINE(ARIZONAMODELAICRAFTERSN.D.)
Figure6showsthemachineguninrelationtotheengineandcockpit,alongwithdimensions.Thisis
one of the rare drawings showing accurate information on the EIII. The picture is originally from
AerialAceWeekly,September1916.
4.3.4Onboardammunition
The ammunition carried on the EIII was reported to be two belts of 200 to 250 rounds each. The
pilot had to manually reload the gun once the first belt ran out. Various adaptations to the guns
cockinghandleweremadeinordertoenableinairreloading.
4.3.5Trigger
Themovementofthetriggerrequiredtofirethegunisofimportancetotheproject.Thispresentsa
problem,asnodocumentationordescriptionscouldbefoundonthemovementneededtofirethe
gun.Itwasdecidedthatthedimensionsofthetriggerwouldbetakenandanapproximationofthe
triggermovementmadefordesignpurposes.
ThetriggeronthestandardSpandaumachinegunthatwasmountedontheEIIIwashiddeninside
thebody.Thisadaptationwasmadedonetobettersuittheaircraft.Theunmodifiedgunstrigger
canbeseen,howeverandwillbeusedasareference.
11
FIGURE7STANDARDLIGHTENEDSPANDAU
FromFigure7,thetriggerisestimatedtobeapproximately25mmlong.Thispictureofthegun
appearedintheWindsockMiniDatafileontheSpandauguns(Woodman1997)andwasdrawnto
scalebytheauthor.Thoughthedrawingisnotingreatdetail,theproportionsandthe
approximationofthetriggercanbetakenasaccurate.
4.3.6PilotsTrigger
Thepilotfiredthemachinegunusingatriggerontheyoke(joystick)oftheplane.Researchwas
doneonhowthismechanismworkedandphotosillustratingtheyokeandtriggerwerefound.Figure
8showstheyokeandthetrigger.Uponmagnificationoftheyoke,acablerunninginasleevecanbe
seen.Thiscableisthenconnectedtothesynchronisingmechanismofthemachinegun.Other
picturesthatwereviewedsubstantiatedthisfact,thoughtheyarenotshownhere.
FIGURE8AREPRODUCTIONEIIICOCKPIT(ATEN&ENGELS2002)
12
4.4Airframe
During WWI, many planes had airframes constructed entirely of wood. Wood is very light with a
good strength to weight ratio. The Fokker Eindecker range of planes was different: with the
exceptionofthewings,theentireEindeckerrangeofplaneshadasteeltubeairframewithwelded
joints. In addition, metal cowlings were used with large amounts of wire bracing for structural
support.
Verylittleliteratureisavailableonthedetailsoftheairframeoftheseplanes,especiallyasthereis
onlyoneEIIIknowntostillexist.Thedetailsofthenosesectionoftheairframewerededucedfrom
available drawings. Figure 6 was used in conjunction with many other figures, including Figure 9
below.
FIGURE9DETAILEDNOSESECTIONOFTHEEIII
Unfortunately, Figure 6 and Figure 9 do not show all the structural members that would influence
thedesign.Inordertosupplementthelackofdata,photogrammetrysoftwarewasusedonpictures
thatshowthenecessaryportionsoftheairframe.
Photogrammetry software allows one to measure distances on an image, given that a reference
distanceisprovided.Theprogramthatwasusedtothisend,isafreeprogramcalledMeazure.Using
thisprogramandagooddealofdeductivereasoning,areasonablyaccuratepictureoftheairframe
couldbebuilt.
13
4.5WorldWar1ManufacturingCapabilities
Though this is not the topic of the report, some basic research on the manufacturing methods
availabletothefactoriesoftheeraisnecessarytoguidethedesignofthemechanism.Itwouldbeof
nousetodesignamechanismthatcanonlybemadeusingacomputercontrolledmillingmachine,
forinstance.
Machining of metals started during the industrial revolution in the 18
th
century. Developments in
machineaccuracywererapidandmassproductionbecamepossible.
4.5.1Measurement
The first micrometer was invented by J. Watt in 1772. His invention provided incredibly accurate
measurements, the smallest reading on his device being 1/10000
th of an inch, or
3
6.45 10
mm
(Mitutoyo2008).
The use of micrometers was spread worldwide by WWI, thus manufacturers could measure very
accuratelybythattime.
4.5.2MillingMachines
TheMerriamWebsterdictionarydefinesamillingmachineasamachinetoolonwhichworkusually
of metal secured to a carriage is shaped by rotating milling cutters. The first such a machine was
inventedbyEliWhitneyin1818.Heinventedthemachineinordertomassproducemusketsforthe
UnitedStatesgovernment(eMachinetooln.d.).Ifgunscouldbemassproducedin1818,themilling
machine capabilities can be assumed to be quite extensive and mass production of uncomplicated
partswouldhavebeeneasy.
4.5.3Lathe
ThesameyearthatEliWhitneyinventedthemillingmachine,ThomasBlanchardinventedacopying
machine for turning the stocks of rifles on a lathe (eMachinetool n.d.). From this it can also be
concludedthatmassproductionofcomponentsonalathewasnoproblembyWW1.
14
4.6MaterialResearch
AccordingtoDierikx(1997),theframeoftheFokkerEIIIwasmadeofAISI(AmericanIronandSteel
Institute) 4130 steel. The steel is described as a ferrous, low alloy, medium carbon steel by
Aerospace Specification Metals Inc. (n.d.), also referred to as ASM. Table 2 lists the properties of
4130 steel according to ASM (n.d.). ASM provides extensive information on materials on their
website,allofwhichisreferencedtocrediblesourcessuchastextbooksanddirectinformationfrom
themanufacturers.TheinformationontheASMwebsiteisthereforeregardedastrustworthy.
TABLE2PROPERTIESOFAISI4130STEEL
Property Value
Density 7850kg/m
3
BrinellHardness 197
Ultimatetensilestrength 670MPa
Yieldstrength 435MPa
ModulusofElasticity 205GPa
PoissonsRatio 0.29
Machinability 70%
According to the website Key to Metals (2010), aluminium was widely used in WWI, especially in
aviation.ThealloyusedoriginatedinGermanyandisknowntodayas2017T4.Thisalloywasusedat
thetimetobuildairshipsandtomakecomponentsforairplanes.Table3liststhepropertiesofthis
aluminiumalloy,alsoaccordingtoASM(n.d.)
TABLE32017T4ALUMINIUMSPECIFICATIONS
Property Value
Density 2790kg/m
3
BrinellHardness 105
Ultimatetensilestrength 427MPa
Yieldstrength 276MPa
ModulusofElasticity 72.4GPa
PoissonsRatio 0.33
Machinability 70%
Comparing these two metals, it can be seen that the aluminium has about a third the density of
steel. This is a major advantage in using the aluminium in the design, as weight is very important.
The yield strength of the aluminium is more than half that of the steel, so the reduction in weight
exceeds the reduction in strength. The only possible drawback in using the aluminium is that the
modulus of elasticity is considerably smaller, 2.8 times smaller, to be exact. This could have
influenceswhenitcomestolongmembersthatneedbucklingresistance.
15
4.6.1BushMaterial
Depending on the material that is selected for the design, the material used as bushing will differ.
The bush material has to be softer than the other components material. This will ensure that the
bushingwearsandnotthecomponents.Ifthebushwearsoutthecomponent,itwilldefeatitsown
purpose.
Ifthesteelisused,bronzewillbeconsideredforbushing.Bronzehaslongbeenusedasbushingin
variousapplications.Itissofterthansteelandsimplyneedstobegreasedregularly.
Ifaluminiumisused,bronzewilllikelybetoohard.Itisrecommendedthatapureraluminiumalloy
beusedasbushingmaterial.MaterialReference(n.d.)listsalloy1100Oasalowstrengthalloywith
very good corrosion resistance. It also mentions that this particular alloy is very soft. Suppliers
Online state that the 1100 aluminium alloy has a Brinell hardness of just 28, much less than the
2017T4alloy.Thiswouldmakeanexcellentmaterialforbushing
4.7CamDesign
Thedesignofthecamthatcouldtransferthemotionfromtheenginetothesynchroniserhadtobe
carefully researched. Rothbart (2004) provides an in depth look into cams in his book Cam Design
Handbook.
4.7.1FollowerTypes
Camfollowerscomeinvariousshapesandconfigurations,eachhavingitsownapplication.Follower
movementcanbecanbeclassifiedastranslation,oscillationorindexing.Thesurfaceofthefollower
alsohasdifferentclassifications:knifeedge,flat,curvedorroller(Figure10).Forthepurposeofthis
discussion,onlyspringloadedcamfollowerswillbeconsidered.
FIGURE10CAMFOLLOWERTYPES(ROTHBART2004)
4.7.2CamClassifications
Camsareclassifiedinthreeways:
- Intermsofshape
- Intermsofthefollowermotion
- Intermsoffollowerconstraint
Avastvarietyofcamshapesareinuseworldwide,butforapplicationtothisproject,onlyradial
camsconstrainedbyspringloadwillbeconsidered.Thefollowermotionistobedetermined.
16
4.7.3CamFollowerMotion
Rothbart(2004)lists4differenttypesofcamfollowermotion,shownbelowinFigure11.
FIGURE11DIFFERENTTYPESOFFOLLOWERMOTION(ROTHBART2004)
4.7.4GraphicalCamProfileLayout
Themotionthatthecamgivestothefollowercanbecharacterisedbyunrollingthecamprofile
ontoastraightline.Themotionofthefollowercanthenbeenvisionedasafollowermovinglinearly
alongacamthatisstandingstill.Cammotioningeneralcanbedescribedinthisfashion.
Usually,thefollowermotionislaidoutonaCartesiancoordinatesystem,withdisplacementonthe
verticalaxisandtimeorangularpositiononthehorizontalaxis.
4.7.5CamNomenclature
Forsimplicitysake,camnomenclatureissummarisedinFigure12below.
FIGURE12CAMNOMENCLATURE(ROTHBART2004)
17
Importanttermsare:
a
R Radiusoftheprimecircleofthecam,thesmallestcircledrawntothepitchcurvefromthe
centreofthecam
b
R Radiusofthesmallestcirclethatcanbedrawntothecamprofilefromtheradialcamcentre
p
R Radiusofthepitchcircle,thecircledrawnaroundthecentreofthecamthatpassesthrough
thepitchpoint
Thepitchpointisthepointonthecampitchwherethemaximumpressureangleoccurs.
4.7.6CamMotionCurves
Therearemanydifferentcurvesthatcandefinethemotionofthecamfollower.Thefollower
motionisdefinedbythedisplacement y fromthebasecircle.Inordertodescribethenatureofthe
followermotion,thederivativesof y areused:
y Velocity
y Acceleration
y Jerkfunction
Themostbasiccurveistheconstantvelocitycurve.Thiscurvehasthefollowermovingatconstant
speedwhileascendinganddescending.Theconstantvelocitycurveisimpractical,becauseofthe
theoreticallyinfiniteaccelerationatthepeakofthecurve.Figure13illustratesthiscurve.
FIGURE13CONSTANTVELOCITYCAMCURVE
Theconstantvelocitycurveillustratestheworstcasescenarioforacam.Rothbartstatesthat:The
camfunctionmustbecontinuousthroughthefirstandsecondderivativesacrosstheentireinterval
andthejerkfunctionmustbefiniteacrosstheentireinterval.
18
TheModifiedTrapezoidalCurve
Manycurvesforcammotionwerestudied.Themodifiedtrapezoidalcurveappearstohavegood
characteristics.Thecurveiscomposedoftwodifferentcurves,theparabolicmotionandcycloidal
curve.Thiscurvereducesthemaximumaccelerationinthesystem.Theexpenseofthereduced
accelerationisslightlyhigherjerkvalues,however.Oneissuewiththiscurve,however,isthatthe
toquegoesfromitspositivetonegativemaximumin20%ofthetraveltime.Thiscanlimitthe
speedsthecamisabletooperateat.
FIGURE14MODIFIEDTRAPEZOIDALCURVE(ROTHBART2004)
TheModifiedSineCurve
Themodifiedsinecurveisformedusingacombinationofquartersinewavecurves.Torsionalaction
changesfromthepositivetonegativemaximumover40%ofthetraveltime,asignificant
improvementoverthemodifiedtrapezoidalcurve.Thischaracteristicmakesthemodifiedsinecurve
oneofthebestchoicesaccordingtoRothbart(2004).Figure15showsthemodifiedsinecurve
FIGURE15MODIFIEDSINECURVEANDTHESTANDARDCYCLOIDALCURVE
Therearethreesetsofequationsthatdefinethemotionachievedbythiscurve.Theywillbegivenin
thedesignsectionofthereport.
19
4.7.7Camfollowerconstraint
Thefollowerwillbekeptincontactwiththecambymeansofaspring.Thespringconstantwillbe
evaluatedusingSolidWorksMotion.Thiswillallowchangingofthespringconstantanda
visualisationoftheresults.
20
Propellersynchronisationdevice
5. FunctionalAnalysis
Afunctionalanalysisisusedtolistallofthefunctionsofagivensysteminanorderlyfashion.It
servesthereaderandthedesigner,providinganoverviewoftheentiresystemthatneedstobe
designed.
5.1SystemlevelDiagram
Systemleveldiagram
FIGURE16SYSTEMLEVELDIAGRAM
5.2MissionLevelDiagram
Simplicity
Weight
Reliability
Safety
Simplicity
Adaptabletootherplanes
Standardgun
Maintainability
Lifetime
FIGURE17MISSIONLEVELDIAGRAM
Synchronisation PilotTrigger MachineGunTrigger
Synchronise
withengine
rotation
Transmit
movement
torestof
system
Receive
inputfrom
pilot
Transmit
signalto
machinegun
Receive
commandfrom
pilotand
synchroniser
Transmit
command
togun
Interruptfire
DesignParameters
21
5.3FunctionalDiagrams
Firemachinegun
throughthe
propellerarc
1.0
Obtainmotion
fromengine
1.1
Obtaininputfrom
pilottrigger
1.2
Synchronisepilot
inputwithengine
motion
1.3
Transfer
synchronised
motiontothegun
1.4
Gunissynchronisedwith
theengineandpilotand
isandfunctional
2.0
Scopeoftheproblem
FIGURE18SYSTEMLEVELFUNCTIONAL
DIAGRAM
1.1Obtainmotion
fromengine
1.1.1Useexisting
engine
1.1.2Useexisting
engineposition
1.1.3Donotaffect
theengines
performance
1.2Obtaininput
frompilottrigger
1.2.1Usecurrent
triggermechanism
1.3Synchronise
pilotinputwith
enginemotion
1.3.1Couplepilot
inputtoengine
output
1.4Transfer
synchronised
motiontothegun
1.4.1Obtainmotion
fromother
components
1.4.2Transferthe
motiontothegun
withnodelay
22
5.4DesignParametersperFunction
Function DesignParameters
1.1Obtainmotionfromengine
1.1.1Useexistingengine - Informationonengine
- Angularvelocity
- Speedvariance
1.1.2Useexistingengineposition - Detailsonframe
- Enginemountingpoints
- Enginedimensions
1.1.3Donotaffecttheenginesperformance - Lowweight
- Lowfriction
- Smallforcestakenfromsystem
1.2Obtaininputfrompilottrigger
1.2.1Usecurrenttriggermechanism - Whatisinuse
- Interfacemechanism
- Possiblepositions
1.3Synchronisepilotinputwithenginemotion
1.3.1Couplepilotinputtoengineoutput - Inputandoutputshouldnotinfluence
eachother
- Connectionshouldbeinstantaneous
- Uncouplewhenpilotreleasestrigger
1.4Transfersynchronisedmotiontothegun
1.4.1Obtainmotionfromothercomponents -
1.4.2Transferthemotiontothegunwithno
delay
- Userigidcomponentsthatdonot
deformeasily
23
6. DesignRequirements/Technicalspecifications
Thepropellersynchronisationdevicehastobedesignedaccordingtothesedesignrequirements:
- Theweightshouldnotinfluencetheplanesperformance
- Nomodernmaterialssuchasplasticorcomposite(carbonfibre)materialsareallowed
- Modernlubricationmaybeused
- Thedesigncanassumeveryregularmaintenance
- Thedesignlifeofthemechanismhastobethelifetimeoftheaverageplane
- Themechanismshouldmakeitimpossibletofirethegunifthepropellercouldgethit.
Thepropellersynchronisationdeviceshouldmeetthefollowingtechnicalspecifications:
- Itshouldbefunctionaluptoanenginespeedof1300rpm
- Itshouldbeabletofunctionindependentofthedirectiongravityispulling(iftheplaneis
inverted
- Theweightshouldbelimitedtonomorethan2kg
- Theservicelifeofthemechanismshouldbebetween2and3months
24
7. Conceptgenerationandevaluation
7.1Principleofoperation
Thesynchronisationofthemachinegunwiththepropellercanbedoneinoneoftwomainways.
Thefirstmethodwouldbetohavethepilotfirethegun,witheachpassthatthepropellermakes
disengagingthetriggerfromthegun,causinganinterruptioninthefiring.
Thesecondmethodistohavethetriggeronthemachinegunactivatedbythemovementofthe
enginewhenthepropellerbladesarenotobstructingit.Inthisconfiguration,thepilotstrigger
wouldsimplyengagethemechanismwithoutdirectlyactivatingthetriggeronthemachinegun.
Itwasdecidedtousethesecondmethod.Thismethodreducesthenumberofcomponentsthat
havetomovesoachievesynchronisation,loweringtheprobabilityoferrorinmanufacturingand
installation.
7.2Obtainingmovementfromtheengine
Thesystemreliesontransmittingtherotationalmovementfromtheenginetothetrigger
mechanisminordertosynchronisethemachinegunandpropeller.Severalconceptswereevaluated
withthisgoalinmind:
Bevelgearcrank
Thisconceptwouldcreateareciprocatinglinearmovementthroughuseoftwobevelgearsanda
pinnedlinkslidinginaslot
25
Bevelgearcam
Thisideaalsousesbevelgearstotranslatethemovementoftheengine.Thedesiredlinear
reciprocatingmovementisgeneratedthroughacamandcamfollower.Thecamandfollowerallow
forlessmovingparts.Thecamfollowercanalsobedisengagedfromthecamtoallowasafety
switch.
Directcam
Thismechanismusesacamthatturnswiththepropeller.Thiscreatesalinearverticalmovement,
convertedtohorizontalmovementthrougharotatinglinkonthenoseofthefuselage.Liftingthe
followerfromthecamwouldallowincorporationofasafetyswitchmechanism.
Evaluation
Thevariousfactorseachconceptisjudgedonaretabulatedbelow.Eachcategoryscorestheconcept
outoften.
Category Bevelgearcrank
Bevelgearcam
Directcam
Simplicity 5 7 9
Safety 0 10 10
Weight 6 7 10
Componentnumber 5 6 9
ManufacturingCost 5 5 8
Easeofmanufacturing 4 6 9
Total 25 41 55
Thebestconceptforthisdesignisthereforethedirectcamsolution
26
7.3Engagingthetriggermechanism
Asnotedabove,thetriggeronthegunwillbedirectlypushedbythesynchroniser.Thepilotstrigger
willsimplyallowthemechanismtomakecontactwiththegunstrigger.
Torsionalspringlever
Thisconceptreliesonalinkthatiskeptverticalthroughatorsionalspring.Thelinkwillbemovedup
whenthepilotpullsthetrigger,bridgingthegapinthesystem,allowingtheguntofireastherod
moves.
27
Torsionalspringlever2
Amodificationofthepreviousconcept,thisleveriswedgeshapedandwillmovedownwhenthe
pilotpullsthetrigger.Theideaofthewedgeshapeistoallowthemechanismtoengagemore
smoothly.
Swinginglink
Whenthepilotpullsthetriggerontheyoke,itwillswingthelinkattachedtothetriggerpushrod
forwardstocompletethecircuit,allowingtheguntofire.
28
Evaluation
Thevariousfactorseachconceptisjudgedonaretabulatedbelow.Eachcategoryscorestheconcept
outoften.
Category Torsionalspringlever
Torsionalspringlever
2
Swinginglink
Easeofexecution 7 7 9
Simplicity 8 8 6
Weight 8 8 7
Reliability 7 7 8
Compactness 7 7 8
Easeofassembly 6 6 9
Theswinginglinkwillbeused.Torsionalspringsontheothercomponentsprovideaweaknessthatis
morelikelytofailduringextendeduse.Inaddition,theswinginglinkwillnotneedasmuch
supportingstructuretokeepitsteadyastheothertwoconcepts.
7.4ConceptRefinement
Oncetheconceptsweredecidedupon,theyhadtoberefinedintoviableconfigurations.
FirstAttempt
Thefirstdetailedideaispicturedbelow.Themechanismisveryunrefinedandhadroomfor
improvement.Themainissuewasisolatingtheinterruptermovementfromthetriggercableonthe
yoke.Thisideashowsaspringinbetweenthetwoparts.Thisideawasdiscreditedduetothe
ineffectiveisolationofmovement.
SecondAttempt
Thisconceptisarefinementofthepreviousidea.Theproblemposedbyisolationofmovementfrom
thetriggerontheyokewassolvedbyallowingthemechanismtoslideinatypeoffork.Thisallows
thetriggerontheyoketoconnectanddisconnectthemovementoftheinterruptertothemachine
gun,whilstisolatingthismovementfromthetrigger.
Thespringontopofthemechanismwouldensurethatthelevermovedupagainoncethepilot
releasedthetrigger,causingthemachineguntostopfiring.
29
Itwasdecidedtodevelopthisconceptintoafinaldesign,asitmetallthecriteriaspecifiedandcould
bemanufacturedwithrelativeease.
30
7.5InitialDrawings
Toaidvisualisationoftheconceptsthatwereselected,theyweredrawninSolidWorkswith
arbitrarydimensions.Thishelpedtobreakthesystemupintoitscomponentsandgiveanideaon
howthefinaldesignshouldbeapproached.TheinitialdesigncanbeseeninFigure19.
FIGURE19INITIALCADDRAWING
Thisdrawingwasverycrude;thecomponentsweresizedrelativetoeachotherandsimplygavea
startingpointforthefinaldesign.Amistakewasmadeatthispointinthedesign.Theinitialdrawing
didnotincludeenoughdetailanddetailslikemountingpointswerenotspecified.Thishappened
becausetheairframehadnotyetbeendrawninSolidWorks,creatingcomplicationslaterinthe
design.
31
7.5EngagingtheTrigger
Initially,thethoughtwastohavethetriggerpusheddirectlybythemechanism.Thiswasfoundtobe
impossible,duetotheheightofthetriggerabovethepossiblemountingpointsfortheentire
system.Anadaptationtothedesignhadtobemadethatdidnotrequirearedesignofthewhole
configuration.
Solidlinkage
Theideaofusingrigidlinksrotatingaboutpinnedjointswasconsidered,anideasimilartoFigure20
wasconsidered:
FIGURE20TRIGGERENGAGINGCONCEPT
Thisideawasabandonedthough;thesystemwouldaddalotofweighttotheplane,asitwould
requiresturdysupports.Theinertiaofsuchanarrangementcouldalsobealiability.Thelinkage
couldcausealaginpullingthetrigger,orevenbreakapartunderthehighspeedofthemovement.
PulleySystem
Usingasetofpulleysconnectedviaacablewasthenextideathatseemedplausible.Therodwould
pullacablethatranovertwopulleys.Thecablewouldthenpullthetrigger.Figure21illustratesthis
idea:
FIGURE21CABLETRIGGERENGAGINGCONCEPT
32
8. DetailDesign
Thedesignofthesynchronisationmechanismwasapproachedbyusingasimplerisbetter
philosophy.Thebasicdesignwasthoughtupusingasfewcomponentsaspossible.Thecomponents
werethendrawninSolidWorksinsuchawaythattheentiresystemwouldbemodular.Themodular
natureofthesystemwasdecideduponsothatthedesigncouldeasilybeadaptedtootherplanes.
FIGURE22THECOMPLETEMECHANISMANDFRAME
Basicsystemfunctionality
Inordertosynchronisethemachinegunandthepropeller,thetwocomponentshavetohavesome
sortofinteractionorcommunication.Theapproachusedforthismechanismallowsthemovement
oftheenginetodirectlyfirethemachinegun.Thisessentiallymakesthemachinegunasemi
automaticriflethatisfiredbyanengine.
Themechanismthatfiresthegunisalwaysmovingwiththeengine.Whenthepilotwantstofirethe
gun,thebuttonhepushescompletesthemechanism,allowingtheinputfromtheenginetopullthe
gunstrigger.
33
Thesystemisanalogoustoanyelectriccircuit.Theenginecanbeseenasthepowersourceandthe
machinegunasalight.Thelightgetsswitchedonwhenthepilotpusheshisfiringbuttoninthe
cockpit.
Themovementfromtheengineisobtainedthroughacam.Thismovementisthentranslatedtothe
gunthroughtheseriesofrigidlinksandacable.
8.1DrawingtheFrame
Forthedesignofthemechanismtobedone,accuratedimensionsontheairframesnosesection
wereneeded.ItwasseenasnecessarytodrawaCADmodeloftheframetoaidintheoverall
design.
Drawingtheframewasfoundtobeverydifficult.Thesketchesavailablewerenotveryclear,nordid
theyprovideallthenecessarydimensions.Figure6andFigure9wereveryhelpfulindrawingthe
frame.Thedimensionsthatwerenotfoundonthesesketcheswerederivedfromphotosusing
photogrammetrysoftware,aspreviouslyexplained.
Forsimplificationofthedrawingprocess,standardpipingincludedinSolidWorkswasusedtodraw
theframe.Thetubesthatwereusedinthedrawinghaveadiameterof21.5mm.Originally;theEIII
wasconstructedoftubeswitha22mmdiameter.Thediscrepanciesbetweentheseareconsidered
tobeatechnicality,howeveranddonotreallyinfluencethedesignasawhole.
FIGURE23THEFOKKEREIIINOSEFRAME
34
Figure23showsthedrawnframe.Certainsimplificationsweremadeandthemembersthatdidnot
applytotheplanneddesignwereomitted.Thisincludestheenginebracethatisnormallybehindthe
metaldiskthatcanbeseeninthefigure.
Unfortunately,theengineitselfcannotbeincludedinthismodel,asthedetailsoftheengines
drawingsareverycomplexandnotcompleteenoughtomodel.
8.2DefiningtheMotion
Beforethedesignofthesystemasawholecouldcommence,thedesiredmovementhadtobe
defined.Thismovementhingedonthemovementrequiredtopullthetriggerofthegun.Fromthe
informationthatwasavailable,thetriggerlengthwasestimatedtobe25mm.Fromthislength,the
movementtofirecouldbeestimated.Notwogunshaveexactlythesametriggerresponse,so
estimatingthetriggermovementisnecessary.Thedesignshouldbeadjustabletocompensatefor
differenttriggerresponses.
Thetriggermovementcanbeapproximatedasarightangledtriangle,withthexdimensionthe
lengthofthetrigger.Figure24belowillustratestheprinciple:
FIGURE24DETEMININGTHEMOVEMENTOFTHETRIGGER
Fromthis,areasonablemovementtolerancehadtobeestimated.Between5and10mmwouldbe
anacceptablerangetoworkin.
5mmmovementwouldrotatethetriggerby:
5
arctan( )
25
11.3
angle
angle
=
=
EQUATION1
10mmmovementwouldrotatethetriggerby:
10
arctan( )
25
11.3
angle
angle
=
=
EQUATION2
Boththeseanglesseemsmallenoughtobearealisticapproximationofthetriggermovement.
35
8.3Locatingthemechanism
Thedesignrequirementsforthisprojectstatethatonlytwocomponentsneededtobeanalysedin
detail.Fromthisrequirement,manyofthecomponentswerenotanalysedindepth,butrather
designedaccordingtogeneralengineeringknowledge.Thisisnothowonewoulddesignasystemin
practice,butfortheacademicpurposeofthisprojectitisacceptable.
Fromtheverybeginning,theweightsofthecomponentsweretakenintoaccount.Everythingwas
designedassmallaspossible.Certainpartsweremadebiggerforthepurposesofmakingthesystem
easiertomanufactureandassemble.Theincreasesinsizewerekeptataminimum,though,inorder
tosaveweight.
8.3.1Mountingpoints
Thelocationforthemechanismhadtobedefinedontheframe.Itwasdecidedtolocatethe
mechanismononeofthehorizontalcrossbraces,directlyunderthegun.
FIGURE25SECTIONVIEWOFTHEAIRFRAMESHOWINGMOUNTINGPOINTS
Figure25showsthecrossbarsusedformounting.Thethickerofthetwowillhaveashoulder
weldedontoit.Thisshoulderservestolocatetheentiremechanismalongthepipe.Theshoulderis
putinplacetoassistinassembly,morethanforsupport.Ashoulderisalsoontheothersideofthe
sectiontofurtheraidinlocatingthemechanism.
Anextracrossbarwasinsertedintotheframeformountingpurposes,indicatedinFigure25.
Becausethispipewasnotneededforstructuralstabilityoftheplane,itwasdecidedtogiveita
smallerdiametertosaveweight.Theextramountissituated100mminfrontoftheothercrossbar.
36
8.3.2OffCentreMounting
Themachinegunwasmountedwithaslightoffsettotherightofthefuselage.Thisdistancewas
calculatedfromtheframedrawing.Fromtheperspectiveofthecockpit,thegunwasmounted
275mmfromtherightsideoftheplane.Thisgaveitandoffsetof50mm.Thecentreofthe
mechanismwouldlineupwiththegunsoffset.
8.3.3MountingBracket
Otherthantheshouldersthatwereaddedtotheframe,anotherbrackethadtobeattachedtothe
frametoactasahingepoint.ThisadditionisalsodepictedonFigure25.Itwaslaterdecidedtoadd
twoofthesebracketstotheframe,butthiswillbediscussedinduecourse.
8.4DesigningtheBasePlate
Thebaseplateisthecomponentuponwhichalltheothercomponentswillbefitted.Thiswasthe
firstcomponentthatwasdrawnbecauseitdefinedthepositionsofalltheothercomponents.Once
thebaseplatewasattachedtotheframe,theothercomponentscouldbesizedandmeasured
accordingly.
FIGURE26BASEPLATE
Itwasdecidedtomanufacturethebaseplateoutof2017T4aluminium.Thebaseplateitselfwill
notexperienceanylargeloads,sincetheconceptdecideduponhasforcesappliedparalleltothe
plate.Theonlyperpendicularforcethatthebaseplatewouldexperiencewouldbeasmallforce
fromtheengagingmechanism.
Thedecisionwasmadetomanufacturethebaseplateoutof3mmthickaluminiumplates.This
thicknessplateisoftenmadebyaluminiumfactoriesandcouldbeeasilyprocured.Thebaseplate
wouldbesecuredtightlytotheairframe,withthesupportsonly100mmapart,makingithighly
unlikelytofail.
Asthedesignprogressed,thebaseplatechangedwithit.Thecomponentsthatwereneededwere
drawnandthebaseplateadaptedaccordingly.
Thisapproachwasfoundtobeveryeffective.Thecomponentscouldbeinsertedintotheassembly
astheyweredrawn.Anyproblemswerequicklyseenandcouldbedealtwithimmediately.
37
8.4.1SecuringtheBasePlate
Tosecurethebaseplatetotheairframe,itwasdecidedtousecomponentsthatcouldbemadefrom
sheetmetal.Thiswouldmakeproductioneasieronalargescaleandlowercosts.
8.5JournalBearingHousing
Oncethebaseplatewasinpositionontheframe,thecomponentssecuringtheshaftscouldbe
designed.Forsimplicitysake,threeofthesamehousingswereusedfortwoseparateshafts.The
threehousingscouldhavedesigneddifferently,butforeaseofproduction,threeidentical
componentswasthebetterchoice.
FIGURE27JOURNALBEARINGHOUSING
Thehousingwasmadesoabushcouldeasilybefittedinsideit.Twoholesweremadewhereset
screwscouldsecurethebush.Usingthedimensionsofthebushandthejournalbearing,theheight
ofthepushrodcouldbedetermined.
8.6RodEndsandConnectingRod
Inordertoobtainlinearmotionofthepushrodforthetrigger,certainlinkshadtobemade.This
partofthesystemismovedbyalinkrotatingaboutafixedaxis.Asimplewaytoturnthisrotation
intoalinearmotionistomakethesystemintoaslidercrankmechanism(Figure28).Aslidercrank
mechanismusesarotatinglink( a )topushapistonatpointBinastraightline.
FIGURE28BASICSLIDERCRANKMECHANISM
38
Link a isalreadydefinedbytheangleonthenoseoftheplane,link b needstobedefinedinterms
ofparts.
Twopinnedjointsareneeded,oneateachendoflink b .Insteadofmakingasinglesolidpart,this
linkisdividedintothreeparts:tworodendsandapipe.Dividinglink b uphasadvantages:
1) Usingapipesavesalotofweight,whilstmaintainingmostoftherigidity
2) Thesmallerrodendsareeasiertomassproduce;machininglotsofsmallercomponentsis
easierthanworkingwithasmalleramountofbigones.
3) Rodendsallowthelengthofthelinktobeadjustedbyscrewingtheminorout,
compensatingforvariationsindifferentframes.
4) Ifoneofthecomponentsbreaks,itissimplertoreplaceasmallpart.
FIGURE29PIPEWITHTWORODENDS
Thefinaldimensionsofthepipeandrodendswillbeadaptedlaterinthereport.Thechosen
dimensionsareastartingpointforpossibleoptimisationduringanalysis.
39
8.3Calculatingthedistances
Oncethecomponentshadbeendefined,thedistancesandmovementscouldbecalculated.Thiswas
aniterativeprocess,aidedbyinputtingequationsforaslidercrankintoMatlab.
FIGURE30DISTANCESBETWEENMOUNTINGPOINTS
Figure30showsthedistancesbetweenthemountingpoints.Thisfigureonlyshowsthehorizontal
distancesbetweenthevariouspipes.Thesedimensionsneededtobeadjustedtoaccountforthe
sizesofthecomponents.
Takingthelocationsoftheboltholes,thejournalbearingcasingandthepushrodintoaccount,the
systemcanbemodelledasinFigure31.
FIGURE31MODIFIEDDISTANCESFORTHESLIDERCRANK
Using this simplified model, the links a and b can be sized. The lengths of these links depend on
each other, while the lengths will affect the movement of the mechanism. Previously, it was
calculatedthatthetriggermovementshouldbebetween5and10mm.
The movement of the trigger will be defined by the change in the distance d . This change in
distance will be used to calculate the angle that link a needs to rotate by, in turn defining the rise
thatthecamhastogive.
Tostarttheiteration,initialvalueshadtobechosen.Thestartingdistance d wasknown,definedby
theparts.Thelengthof a waschosenandtheothervaluescalculatedfromthem.Basicslidercrank
formulas,accordingtoNorton(2009),wereusedtoaccomplishthis:
2
3
sin( )
arcsin( )
a c
b
u
u t
= + EQUATION3
2 3
cos( ) cos( ) d a b u u = EQUATION4
40
FIGURE32SLIDERCRANK
Figure32isgivenabovetosimplifyreferencetothesymbolsused.
2
u wouldstartat 90
andbe
badesmalleruntilthechangeinthevalueof d isequaltotheamountofmovementthatisdesired.
8.3.1Calculatebforachosena
Thelengthoflink b hadtobecalculatedaccordingtoachosenlengthforlink a .Thiswasdonewith
a inaverticalpositionandusingPythagorastheorem:
2 2
( 10.35) b d a = +
Where 232.47 d = mm
Thesecalculationsaredoneveryaccurately,thoughtheairframewillnotbebuiltthisaccurately.
Thesystemiscalculatedaccuratelyanddesignedforadjustmentduringinstallation.
8.3.2Iteration
ThecodethatwasusedtocalculatethevaluesinMatlabwasverysimple,simplytheformulastyped
inthecorrectformat.Thevalueswereinput,outputgivenandrepeatedifnecessary.
StartingValues: 30 a mm =
232.47 d mm =
231.64 b mm =
41
TABLE4ANGLESOFROTATIONFORLINKA=30MM
Angleindegrees
2
u
Rotationof
a in
degrees
3
u indegrees
New d inmm Changein d in
mm
90 0 175.15 231.6 0
80 10 175.26 236.9 5.25
70 20 175.59 242.0 10.41
73 17 175.48 240.5 8.88
71 19 175.56 241.5 9.90
Itcanbeseenthatforamovementofcloseto10mm,link a wouldhavetorotate19.Intermsof
linearmovement,thetipofthelinkwouldneedtomove:
0
30 tan(19 ) 10.32 movement mm = =
Thecalculationswererepeatedforalength 40 a mm =
232.64 d mm =
234.52 b mm =
TABLE5ANGLESOFROTATIONFORLINKA=40MM
Angleindegrees
2
u
Rotationof
a in
degrees
3
u indegrees
New d inmm Changein d in
mm
90 0 172.76 232.64 0
80 10 172.89 239.7 7.02
77 13 172.99 241.8 9.12
76 14 173.03 242.5 9.83
75.5 14.5 173.05 242.8 10.17
Theangleofrotationthatwouldyieldthenecessarymovementforlink a is14.5.Thisisnotalarge
changecomparedtothepreviouslength.Thelinearmovementofthetipofthelinkwouldbe:
0
30 tan(14.5 ) 7.76 movement mm = =
Comparingthisvaluetothepreviousvalue,increasinglink a slengthby10mm,requires24.8%less
movementatthetipofthelink.Thismovementisimportant,becauseitwilldeterminetherisethat
thecamhastogive.Thelessofarisethecamhas,thesmallertheforcesinthesystemwillbe.
TheMatlabcodethatwasusedtodotheseiterationsisgiveninAppendixA.
42
8.4Camdesign
Nowthatthemovementthatthesystemneedsasaninputhasbeendefined,thecamthatactsas
inputcanbedesigned.Camdesignisamassivefieldofstudy,butforsimplemovement,thetheory
canbereducedtorelativelysimpleequationsthatcaneasilybesolvedgiventhecorrectinputs.
Aswasmentionedpreviously,themodifiedsinecurvewillbeusedtodeterminethecamprofile.
Thiscurvehasloweraccelerationandjerk(rateofchangeofacceleration)valuesthanmostother
curvesandiswidelyused.
8.4.1GoverningEquations
TheequationsdefiningthiscurvearegivenbyRothbart(2004).Theseequationsarederivedina
nondimentionalform,makingthemsimplertoworkwith.Theequationsthatdefinethemodified
sinecurvearedividedintothreesets,eachdescribingadifferentportionofthecurve.ThepointsA,
BandCinFigure28indicatewheretheequationsdescribingthecurvechange.Theequationsare
givenaccordingtotheirsections.
FIGURE33THEMODIFIEDSINECURVE(ROTHBART2004)
Symbols: y =displacement
' y =velocity
'' y =acceleration
''' y =jerk
| =angleacrosswhichtheriseisachieved
u =anglemeasuredfrom | sreferencepoint
FromAtoBwhere 0
8
|
u s s :
43
0.43990 0.35014sin(4 ) y h
u u
t
| |
| |
=
|
\ .
E QUATION5
' 0.43990 1 cos 4
h
y
u
t
| |
| | | |
=
| |
\ . \ .
EQUATION6
2
'' 5.52796 sin 4
h
y
u
t
| |
| |
=
|
\ .
EQUATION7
3
''' 69.4664 cos 4
h
y
u
t
| |
| |
=
|
\ .
EQUATION8
FromBtoCwhere
1 7
8 8
| |
u s s :
4
0.28005 0.43990 0.351506sin
3 3
y h
u t u t
| |
( | |
= +
( |
\ .
EQUATION9
4
' 0.43990 1.4724cos
3 3
h
y
t u t
| |
( | |
= +
( |
\ .
EQUATION10
2
4
'' 6.1676 sin
3 3
h
y
t u t
| |
| |
= +
|
\ .
EQUATION11
3
4
''' 25.8347 cos
3 3
h
y
t u t
| |
| |
= +
|
\ .
EQUATION12
Forthelastsection,fromConwards
7
8
|
u | s s :
0.56010 0.43990 0.03515006 y h
u u
t
| |
(
= +
(
EQUATION13
' 0.43989 1 cos 4
h
y
u
t
| |
( | | | |
=
( | |
( \ . \ .
EQUATION14
2
'' 5.52796 sin 4
h
y
u
t
| |
| |
=
|
\ .
EQUATION15
2
'''69.4664 cos 4
h
y
u
t
| |
| |
|
\ .
EQUATION16
44
Theseequationsdescribethedisplacement,velocity,accelerationandjerkofamodifiedsinecurve
foracam.Themaximumvaluesforthevelocity,accelerationandjerkarealsogivenbyRothbart
(2004):
max
' 1.760
h
y
|
= EQUATION17
max 2
'' 5.528
h
y
|
= EQUATION18
max 3
''' 69.47
h
y
|
= EQUATION19
8.4.2DimentionalisingtheValues
Thevaluesyieldedbytheaboveequationsareallnondimentionalised.Noneoftheequations
includeangularvelocity( e )andthishastobecorrectedbeforethevaluesgivemeaningful
informationaboutasystem.
Therisedoesnotneedtobeadjusted,asitisindependentoftheangularvelocity.Theothervalues
areadjustedasfollows:
'( / ) y y m s e = EQUATION20
2 2
''( / ) y y m s e = EQUATION21
3 3
'''( / ) y y m s e = EQUATION22
8.4.3SolvingtheEquations
Solvingalloftheseequationsbyhandwouldbeatedioustask,asmanyvaluesofu havetobe
evaluatedinordertohaveasmoothcurve.Thedecisionwasmadetoprogramtheequationsinto
Matlab,enablingsimplerecalculationofvaluesifnecessary.
ThedecisionwasmadetousethesplinefunctiontodrawthecaminSolidWorks.Thisfunction
createsacurveusingpointsgiveninthesketch.Themorepointsaredrawn,themoreprecisethe
drawingwillbe,thoughthedrawingtimeincreaseswiththenumberofpoints.
TodrawthecaminSolidWorks,45datapointsovertheangle | wasdeemedsufficient.Thespline
functionwouldsmoothoutthepointsandyieldanearperfectmodifiedsinecurve.Therise h
wouldbedoneoveranangleof 90 | = ,withthereturnoccurringoverthesameangle.
45
TABLE6ANGLEOFCAMROTATIONANDTHEASSOCIATEDRISE
Angle
(Degrees
)
Rise
(mm)
6 0.0331
10 0.144
16 0.5087
20 0.8852
26 1.6345
30 2.2417
36 3.2787
40 4.029
46 5.1955
50 5.971
56 7.0811
60 7.7583
66 8.6384
70 9.1148
76 9.64
80 9.856
86 9.99
90 10
Table6illustratesthecurvethatisproducedbytheequationsfortherise.Thevaluesinthetable
areonlysomeofthevaluesusedintheactualdrawing.
Calculatingthemaximumvalues:
max
' 1.760 0.0112
h
y
|
= =
max 2
'' 5.528 0.0224
h
y
|
= =
max 3
''' 69.47 0.179
h
y
|
= =
Dimensionalisingthesevalues:
'( / ) 0.0112 40 1.407 / y y m s m s e t = = =
2 2 2
''( / ) 0.0224(40 ) 353.7 / y y m s m s e t
2
= = =
3 3 3
'''( / ) 0.179 (40 ) 2826.6 y y m s e t = = =
0
10
20
30
40
50
60
70
80
90
100
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
Angle
Rise
46
8.4.4.DeterminingtheSpringConstant
Toensurethatthefollowermaintainscontactwiththecam,aspringhastobeemployed.Thespring
willnotbedesignedindepth,butthespringconstantwillbeevaluatedinSolidWorksMotion.Inthe
caseofacompletedesigninpractice,thespringwouldhavebeendefinedindetail,specifyingthe
diameter,wirethickness,pitchandendconditions.
TheassemblywasanalysedusingSolidWorksmotion,beginningwithalowspringconstantand
graduallyincreasingit.Afterthespringconstantwasadjusted,themotionwasobservedinslow
motion,checkingtoseeifthefollowerleavesthecamduringrotation.
Thespringconstantwasevaluatedatthemaximumreportedenginespeedof1210RPM.Asthe
springconstantwasincreased,thebouncesevenedout.At60N/mm,therewasnoobservable
bounceinthesystem.
Thespringconstantforthesystemwasthustakentobe:60000N/m
8.4.5DrawingtheCam
DrawingthecaminSolidWorkswasatimeconsumingprocess.Itinvolvedspecifying45dimensions
fortheriseevery2degrees.Thesedimensionswerethenmirroredtocreatethedescentcurve.
Onceallthedotshadbeenmade,asplinefunctionwasusedtoconnectallofthepoints,including
theconstantradiussectiononthebasecircle.Thiswasthenextrudedtomakeacamwitha
continuoussurfaceallaround.
8.4.6Mountingthecamtotheengine
Mountingthecamontheengineprovedveryproblematic.Althoughextensiveresearchwasdoneon
theengine,noneofthedrawingsthatwerefoundwereofsuchanatureastogiveadetailed
impressionofthewaytheenginefunctionsandwhereacamcouldbemounted.
Thedecisionwasmadetoomitdetailonthemountingofthecamtotheengineduetopurelackof
information.Inpractices,thecompanythatmadetheenginewouldhaveprovidedthedetails
required.Asthisdesignisdonenearlyacenturyaftertheenginewasmanufactured,thisisnot
possible.
8.4.7BalancingtheCam
Addingthecamtoetheenginewillchangethecentreofmass.Thiswouldcausevibrationandcould
leadtocatastrophicfailureiftheenginebecomestoounbalanced.Theenginesthemselveswere
veryfinelybalanced,duetothelargemassthatwasspinningaroundtheaxis.Afterthecamis
mounted,theenginesimplyhastoberebalanced,asonewouldrebalanceawheelwhenthetires
arechanged.
47
8.5SynchronisingtheBulletMotion
Inordertoavoidshootingthepropellerbladestopieces,itisnecessarytocalculatetheamountof
timethebulletwouldtakefromthemomentitisfiredtothenitclearsthepropeller.Thiswill
determinewhenthemechanismwouldfirethegun.
8.5.1DeterminingtheDistances
Thedistancesbetweenthepropeller,barrelandbreechneedtobedeterminedbeforecalculations
canbedone.
FIGURE34GUNBREECHANDBARRELSTART
ThepartialsectionoftheSpandaugunshowswherethebulletstartsitstrajectorywhenthegunis
fired.Thislocationisrelatedtoanexternalfeaturethatcanbereferencedonadifferentdrawing.
FIGURE35BARRELLENGTH
Forthepurposesofdiscussion,themuzzleboosterattheendofthebarrelwillbetakenaspartof
thebarrel,asmostexternaldimensionsreferencethegunwiththemuzzleboosterincluded.Figure
34andFigure35weremeasuredusingaphotogrammetryprogramcalledMeazure,usingascaleon
thedrawingsasreferenceforthedistances.Figure35alsoincludesthedistancefromthefront
mountoftheguntothemuzzle,agoodreferencepoint.
Thedistancefromthefrontmounttotheenginemountwillbemeasuredonthe3Dmodelthatwas
builtinSolidWorks.ThiswillthenbeusedwithFigure36tocalculatethedistancetothepropeller.
48
FIGURE36OBERURSELENGINEWITHDIMENSIONS
Fromthefigures,therelativedistanceswerecalculatedasinFigure37:
FIGURE37RELATIVEDISTANCESBETWEENPROPELLERANDGUN
8.5.2DeterminingtheTime
Themovementofthebulletcanbebrokenupintotwosections,eachhavingitsownforcesactingon
thebullet:beforeandafterthebulletleavesthebarrel.Whileinthebarrel,thebulletexperiences
acceleration,whenitleavesthebarrel,itimmediatelydecelerates.Boththesefactorsinfluencethe
timeittakestopassthepropeller.
8.5.2.1Beforethebulletleavesthebarrel
Thedetailedphysicsoftheaccelerationofthebulletisbeyondthescopeofthistext,beingfartoo
complicatedwithtoomanyvariables.Inordertosimplifythis,constantlinearaccelerationwillbe
assumedwhilstthebulletisinthebarrel.
Tocalculatethetimeittakesthebullettoreachthemuzzle,Newtonsequationsofmotioncanbe
used:
2
f i
v v
d t
+ | |
A = A
|
\ .
EQUATION23
49
Where: d A
=distancemoved,m
f
v
=finalvelocity,m/s
i
v
=initialvelocity,m/s
t A =timeelapsed,s
ResearchindicatedthattheprimaryroundusedintheSpandauwasthe154grainspitzer.Thisround
willbeusedforcalculations.Repeatedbelowaretheattributesofthisround,forconvenience:
TABLE7ATTRIBUTESOFA154GRAINSPITZERBULLET
Rearranging
2
f i
v v
d t
+ | |
A = A
|
\ .
Equation23,itcanbefoundthat
thetimeittakesthebullettoexitthemuzzleis:
3
853.44 0
2
1.830 10
1.830
t d
t
t ms
+ | |
A = A
|
\ .
A =
A =
EQUATION24
8.5.2.2AftertheBulletLeavestheBarrel
Afterthebulletleavesthebarrel,thephysicsbecomesmorecomplicated.Thedragonthebullet
startstoslowitdown.Addingtothisdrag,isthefactthatthethrustthepropellerisprovidingisalso
slowingdownthebulletmorethanitusuallywould.
Tocalculatehowmuchthebulletissloweddownbydrag,thethrustofthepropellerisneeded.The
propellerthrustiscalculatedusingthefollowingformula
0
550
I
p
T V
thp bhq = = EQUATION25
TheequationisfromAllstarNetwork(2004)andisinimperialunits,where:
thp thrusthorsepower
I
T thrust,lb
0
V velocity,ft/s
bh brakehorsepoweroftheengine
550 conversionfactorfromftlbstohorsepower
Metric
Calibre
Bullet
Diameter
(mm)
Rim
Diameter
(mm)
Body
Diameter
Bullet
type/weigh
tgrains
Muzzle
velocity
(m/s)
Muzzle
energy
(kJ)
7.92x57 8.20(S) 11.88 11.88 154(S) 853.44 3.65
50
p
q propellerefficiency
Thepropellerefficiencyisnormallylimitedat90%duetophysicsandtheaveragevaluethatcan
normallybeattainedis87%.Takingintoaccountthatthepropellerinquestionisfrom1916,the
efficiencywillbeassumedtobe80%.
Takingthemaximumairspeedas139km/h,calculatingthethrustandconvertingittometricunits:
0
550
550 100 0.8
347.33
126.68
p
I
bh
T lb
V
q
= = = EQUATION26
Convertingthistometric: 1545.0 T N =
Thethrustneedstobeconvertedtoairvelocityinordertorelateittothebulletdrag,thefollowing
equationaidsinthisconversion(NASAn.d.):
2 2
0
( ) 0.5 ( )
p e o e
F rV A V V A V V = = EQUATION27
ThesymbolsareexplainedinFigure38
FIGURE38THRUSTCALCULATIONS(NASAN.D.)
Takingthepropellerdiameteras2,5mandthefreestreamvelocityas139km/h:
2
0
2
46.05 /
e
e
F
V V
A
V m s
= +
=
EQUATION28
UsingtheballisticscoefficientBCforthebulletas0.3279(Fr.Frog2012)
SD
BC
i
= EQUATION29
Where
2
m
SD
d
= and i istheformfactorofthebullet.
Solvingfor 0.1746 i = andusingthereferencedragcoefficient 0.2334
g
C =
51
0.1746 0.2334 0.04075
d g
C iC = = = EQUATION30
52
Usingtheequationfrom(Whitney,2011),theaccelerationiscalculated:
2
2
air d
V C A
a
m
= EQUATION31
Takingthedensityofairas
3
1.184 /
air
kg m = from(Cengel2006),theaccelerationcanbe
calculatedas:
2
60 / a m s = backwards.
Usingtheequation:
2
1
2
i av
d v t a t A = A + A
,thetimeforthebullettoclearthebladescanbefound:
4
3.75 10 0.375 t s ms
A = =
Thesameequationcanbeusedtocalculatehowlongittakesthebullettoreachtheblades.This
distanceistakenas114.05mm:
4
1.336 10 0.1336 t s ms
A = =
8.5.2.3Totaltimeandtheoffsetneeded
Totaltimerequiredtoreachthepropellerblades:
0.1336 1.830 1.9636
blades
t ms A = + =
Totaltimetoclearthebladesfromthemomentthebulletisfired:
0.375 1.830 2.205
total
t ms A = + =
Itwasstatedthatthecalculationsforthebulletwouldbedoneatthemaximumrotationalspeedof
theengine.Brannon(1996)reportedthattestsdoneonanEIIIshowedthatthemaximumrotational
speedoftheenginewas1210rpm.Inordertoensurethatthebulletcannothitthepropellerblade,
anenginespeedof1300rpmwillbeusedforcalculations.
Translatingtherpmtodegreespersecond:
360
1200
60
7200deg/ s
u
u
=
=
Calculatingtheamountthepropellerrotatesuntilthebulletreachestheblades:
3
7200 1.9636 10
14.14
u
u
=
=
Nowcalculatingtheamountthepropellerrotatesuntilitclearstheblades:
3
7200 2.205 10
15.876
u
u
=
=
53
Thismeansthatthepropellerdoes0.0441rotationsbeforethebulletclearsit.
Whilethebulletispassingthroughthepropellerarc,thepropellerrotatesatotalof:
15.876 14.14
1.736
u
u
A =
A =
Thiscanbeinterpretedassuch:ifthebulletisfiredwhilstthepropellerbladeisdirectlyaheadofit,
thepropellerwillturn0.0441timesuntilthebulletreachesit,leavingitasshowninFigure
39(assumingcounterclockwiserotation):
FIGURE39MOVEMENTOFPROPELLERASBULLETPASSESTHROUGHIT
Asindicted,thebulletwouldlikelynotimpactthepropellerifthegunfiredasthepropellermoved
past.Thefiguredoesnotaccountforthewidthoftheblade.Toensuresafety,thecammustbe
offsetbyangleAfromthepropeller.Thisangleshouldbemeasuredfromthetrailingedgeofthe
propellertoensurenocontactismade.TheangleAis:
15.876 A = inthedirectionofrotation
8.6Connectingthesystemtothepilotstrigger
Theliteraturesurveyindicatedthatthetriggerontheyokepullsacablethatmovesinasleeve.This
willbeusedasaninputforthemechanism.Thesleevesendwillboltintoaholeinthebracket.This
willallowthecabletoslideinthesleevewhenthepilotpullsthetriggerontheyokewithoutthe
sleevealsomoving.Thecableinsidethesleevewillbesecuredtoapointontheengagermechanism.
Whenthetriggerispulledontheyoke,thecablewillpullontheengagermechanismandthegun
willfire.
54
8.7FiniteElementAnalysis
Inordertoevaluatetheresponseofthesystemtoaload,itwasdecidedtoconductafiniteelement
analysis(FEA)partofthesystem.Thiswouldgivearepresentationofthedistributionofstresses
throughoutthesystem.
ConductinganaccurateFEAisdifficult.Thesystemneedsthecorrectconstraintsandinputsinorder
todeliveraccurateresults.Inaddition,themeshthatiscreatedhastohaveacertainqualityandbe
smallenoughtocalculatethedistributionofstressaccurately.
8.7.1PartstoAnalyse
Itwasdecidedtoanalysethelinksfromjustabovethefolloweruptowherethetriggerisengaged.
Thissectionhasmomentsandforcesthatwouldbedifficulttoanalysebyhandandseemed
interestingtoinvestigate.Figure40showsthepartsthatwereselectedforanalysis.
FIGURE40PARTSSELECTEDFORFEA
8.7.1ANSYS
ANSYSwasselectedtoconducttheFEA.Thisprogramisrelativelyeasytouseandtheresultsit
deliversisveryaccurate.InordertoanalysethepartsinANSYS,theyneedtobeexportedfrom
SolidWorksasaparasolidoncetheassemblyhadbeensimplified.
Itwasdecidedtoconductastaticstructuralanalysisontheparts.Thisdoesnotreflectthedynamic
natureofthesystem,butbyapplyingadverseconditions,thesystemsresponsewouldgiveagood
ideaastoitsstrength.
8.7.2Meshing
OncethepartshadbeenimportedtoANSYS,theyhadtobemeshed.ANSYSautomaticallydefines
thecontactbetweenbodies,butthesecontactconditionswerecheckedtoseeiftheywerecorrect.
Thesizeofthemeshwasdefinedby:
MinSize: 9.585e005
MaxFacesize: 1.5e003m
MaxSize: 1.9e003m
55
FIGURE41TOTALMESH
FIGURE42MESHONTHEFRONTSECTION
FIGURE43MESHONTHEREARSIDE
Figure41,Figure42andFigure43showthemeshthatwasgeneratedforthegeometry.Themeshis
quitefineandtheresultsshouldbereliable.
56
8.7.3BoundaryConditions
Theboundaryconditionsfortheanalysiswerechosenonaworstcasebasis.Theconditionsapplied
themaximumforcethespringonthecamfollowercouldexperiencetothefollowerrodend,while
theotherendofthesystemwaslocked.Tobemorerealistic,theboltsthatnormallysecurethe
rockerstotheframeweremadeintofrictionlesssupports,actingaspivotpoints.
8.7.4Deformation
ThedeformationofthesystemisshowninFigure44andFigure45.Thefiguresstatethatthe
maximumdeformationofthesystemis1.6mm.Thisishigherthanexpected,thoughthe
deformationisnotsoexcessiveastocausethemechanismtoceasefunctioning.
FIGURE44TOTALDEFORMATIONPLOT
FIGURE45TOTALDEFORMATIONPLOT,DIFFERENTANGLE
57
8.7.5Stress
ThevonMisesstressisplottedbelowinFigure46Figure47andFigure48.Fromtheresults,itcanbe
seenthatthemaximumstressis229.4MPa,muchlowerthanthe435MPayieldstrengthofthe
steel.Inadditiontothemaximumstressbeingwellwithinbounds,manyotherpartsdonot
experiencealotofstress.Thisindicatesthatthecomponentscouldbemadesmallerandlighter,
whilestillremainingfunctional.Thelongconnectingrodandrodends,especially,couldbemade
smaller,astheyexperienceverylowlevelsofstress.
FIGURE46VONMISESSTRESSPLOT1
FIGURE47VONMISESSTRESSPLOT2
58
FIGURE48VONMISESSTRESSPLOT3
8.9Weightofthesystem
ThetotalweightofthesystemiscalculatedthroughSolidWorksintheassemblymode.Accordingto
themassanalysisonSolidWorks,theentiresystemweighs:
1.612kg
Thisisverylight,asurprisingresult,asmanycomponentsweredesignedstrongerthannecessary
becauseallthecomponentswerenotanalysedforthisproject.Iftheresultisputintoperspective,
anaveragepilotweighedabout7080kg,accordingtoBrannon(1996).Thismeansthatthesystem
addsallof
1
70
thofthepilotsweighttotheplane.Thisisaverygoodresult.
59
9. Maintenance
DuringWWItheaircraftwereveryfragileandunreliable.Thisfactmeantthattheplaneswere
servicedveryoften.Theplaneswerethoroughlyinspectedaftereveryflightandtheengines
servicedorrebuiltnearlyasoften.Thisbeingestablished,thesynchronisingsystemhasverygood
maintenancesupportavailable.
9.1Procedurebeforetakeoff
- Beforeeveryflight,thepropellershouldberotatedtocheckthatthemechanismmoveswith
theenginemotion.
- Thetriggerhastobepulledontheyoketoensurethatitmovesinandoutofpositioneasily.
- Themechanismshouldbeturnedoncewiththetriggerengagedandthegununloadedto
confirmthatthegunstriggerispulledastheenginerotates.
9.2Procedureafterlanding
- Aftertheplanehaslanded,themechanismhastobeinspectedforsignsofwear.
- Allthelinkshavetobecheckedtoseeiftheyarestillrigid,withonlythenecessary
movementpossible
- Thebushesthenhavetobegreased.
- Thiswillpreventrustandprolongthelifeofthecomponents
60
10. CostAnalysis
Thecostanalysisonthesystembeingdesignedwillbeaccordingtocurrentquotationsintermsof
currentlabourprices.Inreality,thepriceofthesystemmayhavebeenverydifferentinaWWI
setting.Thisfactcannotreallybeaccountedfor,asinformationonlabourpricesofdifferenterasis
difficulttoimpossibletofind.
Thecostofmachiningthevariouscomponentsdependsontheamountoftimethelabourwould
take.Themorecomplexacomponentis,themoreitwouldcost.Aquoteonmachiningcostswas
givenbytheUniversityofPretoriaworkshops.Thisquotegivesanestimateofthetimeitwouldtake
tomakeeachcomponent,whichtranslatestocostwhenthehourlyratesarefactoredin.Table8
liststhelabourratesthatwereusedincostcalculation:
TABLE8HOURLYRATESFORMANUFACTURING
Typeofwork Hourlyrates
Lathework R200
Millingwork R200
Welding R200
CNCmillingwork R250
Tokeepthequoteasrealisticaspossible,noCNCmillingworkisincluded,asthiswasnotan
availablemanufacturingmethodinWWI.
Thequote,asgiven,isattachedinAppendixB:MachiningQuote.Thequoteputsmachiningcostsfor
allthecomponentsatR7866.67.Thisisexcludingthematerialcosts.Thequoteisdone
conservativelyandthelabourtimesmaylikelybeless.
Thecostofmanufacturingonlyoneofthesesystemsisveryexpensive.Massproductionofthe
systemwouldmakeitmuchcheaper,asjigsandfixturescanbemadetospeedupmanufacturing.A
quotefromDennesEngineeringgivesthecostofthesystemasfollows:
Prototype:R5000.00(allparts)+R3000.00(tooling/jigs/fixtures)=R8000
Theminimumquantityforordersis100units,thisbringsdownthecostofmanufacturing:
Forordersof100ormore:R2600.00perset.(allpricingexclVAT)
Itcanbeseenthatproducingasystemonalargerscalereducesthepriceconsiderably.Thiswould
havebeenthecaseinthesettingofWWI.
Itcanalsobesaid,asasidenote,thatAnthonyFokkerhadaworkshopavailabletohiminthe
factorywheretheplaneswerebuilt.Themanufacturingmayhavelikelybeencheaper,ashecould
makeeverythingatcostpricefortheaircraft.
61
11. ManufacturingSchedule
Thedesignprojectrequirestwononstandardcomponentsmanufacturingdrawings.These
drawingscanbeseeninAppendixD.Themanufacturingscheduleforthesetwocomponentshasto
bedescribedcompletely.Thecomponentsthatwerechosenarethejournalbearingandtheengager
rod.
Twoothernonstandardcomponentshadtobeselectedtobedrawnfreehand.Thesesketcheshad
tobeofhighquality,soadraftsmancouldbeabletogeneratepropermanufacturingdrawingsfrom
thesketches.Thecomponentschosentobedrawnbyhandarethetopconnectorrodandthe
journalbearinghousing.
11.1Journalbearingmanufacturing
Thejournalbearingistobecompletelymanufacturedonalathe.Thebearingwouldstartoutasa
solidcylinderof2017T4aluminium.Thepartwouldbecuttoalengththatcouldbeclampedinthe
lathe.
FIGURE49JOURNALBEARING
Tohaveagoodreference,theendoftherodshouldbefacedandthemeasurementszeroedatthe
face.
Thenextstepwouldbetomachinetheentirelengthdownto18mm,thediameterattheshoulder.
Thepartshouldbemadesotheshoulderistheendthatisnearesttothechuck.Next,thematerial
uptoadepthof33mmfromthefacemustbemachineddownto15mm,withanh6tolerance
(14.99414.983mm).
Thegroovesarethenextsectionstobemade.Eachgrooveis3mmwide.Thesurfacefinishisnot
crucial,sonotoleranceisspecified.Onceboththegroovesarecut,thechamferscanbecutin.Allof
thechamfersare45.Thechamfersforthegroovesare0.2mmwide.Thechamferfortheendofthe
partcanthenbecut;thisisalsoa45chamfer,butitis0.5mmwide.
62
Next,theholeisdrilledthroughthepart.ThesurfacefinishisN6,soitmaybenecessarytohonethe
insideofthecylinder.Theholemustbedrilledmorethan33mmdeep.Oncetheholeisdrilled,the
innerchamfercanbemachined,alsoat45.
Theworkpieceisthenpartedat33mmandclampedtheotherwayround.A45chamfer,0.5mm
deepismachinedandthepertisfinished.
11.2Engagerrodmanufacturing
FIGURE50ENGAGERROD
Thepartbeginsasasolidcylinderof4130steel.Thesteeliscuttolengthsoitcanbeclampedina
lathe.Theentirerodismachineddownto18.44mm.Asectionthatis37.5mmdeepisthen
machineddownto14mm.
Thepartisthenclampedinamillingmachine.Next,the18.44mmsectionismachinedflatuntilthe
14mmsectionidflushwiththeflatsurface.Theflattenedpartoftherodisthenmachineddownby
2mm.Thenthepartistakenoutofthemachine,rotated180andtheprocedurerepeated.
Thepartisclampedsotheforkcanbemachinedout.Thiscutwillbe17mmdeep.Thereisno
specifiedsurfacetoleranceforthisarea.
Next,thesidesoftheforkaremachineddown.Eachfacehastobemachineduntilitis6mmfrom
thecentrelineofthepart,or1mmlowerthanthecircularsurfacenexttoit.Aftereachsideisflat,
the6mmholecanbedrilledthrough.
Theradiiaretobecutnext,usingaradiuscuttingtoolinthemillingmachine.Thepartneedstobe
clampedsothetoolcancutalongthecorrectaxis.Oncethisisdone,thepartisfinished.
63
12. QualificationRequirements
Inordertoensurethatallthecomponentsarefunctionalbeforetheaircraftissentintobattle,the
mechanismmustbeinspected.Thefollowingparametershavetobeinspected:
Cam
- Thecamshouldbesecurelyfastenedtotheengine
- Thecamhastobelinedupwiththefollower
- Thecamprofilehastobesmoothandwithoutanyirregularities
Camfollower
- Acheckhastobedonetoseeifthefollowermaintainssteadycontactwiththecamduringa
rotationoftheenginebyhand.
- Theboltssecuringthevariouscomponentsofthefollowershouldbecheckedtoseeifthey
aresecure
- Thefollowerwheelshouldbeabletospinfreelyonitsaxis
TopRocker
- Theboltssecuringtherockerstoeachothershouldallownorelativemovementbetween
therockers
- Therodendsthatattachtotherockershouldbecheckedtoseeiftheirboltsaresecured.
- Locknutsontherodendshavetobethoroughlytightened
- Thebusheshavetobegreasedbeforetheplaneentersservice
Journalbearinghousings
- Thesetscrewshavetosecurethebearingtightly,preventingthatitslidesinsidethecasing
- Theholeinthehousingshouldlineupsothepushrodcaneasilyslidethroughit
- Theclearancebetweentherodandbearingshouldjustbeenoughforsliding,noother
movementispermitted
Engagingmechanism
- Themechanismshouldeasilymovetoengagethesystemwhenthetriggerontheyokeis
pulled.
- Oncethetriggerisreleased,themechanismshoulddisengageimmediately.
- Thetwobushesguidingtheengagingmechanismshouldallowitsoslidethroughwithout
muchfriction.
- Theshaftshouldbecheckedforimperfectionsthatcouldwearawaythebushing
prematurely.
64
PulleyandCable
- Thecableshouldbesecurelyfastenedtotheshaft.
- Theboltsshouldbecheckedtoseeiftheyaresecure
- Thepulleyshouldbeabletorotatewithoutwobblingonitsaxis
- Thecableshouldbetauttothetouch
65
13. Conclusion
ThesystemtosynchronisethemachinegunofaFokkerEIIIwithitspropellerwasdesigned
accordingtothecustomersspecifications.Certaincomponentsinthesystemwereidentifiedtobe
designedinmoredetail,requiringresearchandlateralthinking.Thesecomponentsprovedtricky
andprovidedvaluableexperiencethroughouttheproject.
Thesynchroniserwasdesignedinordertohandlethemaximumcapabilitiesoftheengineand
machinegun,accordingtotheresearchthatwasdone.Thatbeingsaid,researchwasthebiggest
obstacleduringtheproject.Findinginformationonanaircraftthatisnearly100yearsoldprovedto
beaverydifficulttask.Thisdifficultycameatthecostofdesignqualityandattentiontodetail.Many
aspectsoftheprojectremainedunexploredduetoresearchdelays.
Thoughtheprojectencountereddifficulties,afullydesignedsystemisthefinalresult.Thissystem
wouldfunctionifitwereputintoserviceandtheprojectcanbeseenasasuccessinthoseterms.
66
14. References
EyeWitnesstoHistory,2003,TheWrightBrothersFirstFlight,1903,viewed20May2013,
http://www.eyewitnesstohistory.com/wright.htm
Centuryofflight,n.d.,Worldwar1aerialcombat,viewed20May2013,http://www.centuryof
flight.net/Aviation%20history/airplane%20at%20war/World%20War%20I%20Aerial%20Combat.htm
Grosz,PM1989,WindsockDatafile15:FokkerE.III,AlbatrosProductions,Berkhamsted
Brannon,DE1996,FokkerEindeckerinaction,Squadron/SignalPublicationsInc.,Carrolton
ArizonaModelAicraftersn.d.,Aircraft,viewed30March2013,
http://www.finemodelworks.com/arizonamodels/reference/Thumbs/Aircraft/Aircraft.html
TheVintageAviatorn.d.,TheSpandauLMG08/15,viewed25March2013,
http://thevintageaviator.co.nz/projects/reproductionguns/luftgekultmaschinengewehr0815
machinegun
Popenker,M&Williams,AG2008,Machinegun:thedevelopmentofthemachinegunfromthe19
th
centurytothepresentday,TheCrowoodPress,Wiltshire
Williams,AG2009.HistoricMachineGunCartridges,SmallArmsReview,February.
MerriamWebster2013,millingmachine,viewed21May2013,http://www.merriam
webster.com/dictionary/milling%20machine
Mitutoyo2008,Abriefhistoryofthemicrometer,Viewed21May2013,
http://www.mitutoyo.com/pdf/History_of_Micro.pdf
eMachinetooln.d.,Thetwocountriesthatinventedtheindustrialrevolution,viewed21May2013,
http://www.emachinetool.com/machine_history.cfm
Dierikx,MLJ1997,Fokker(Smithsonianhistoryofaviationandspaceflight,Smithsonian,
Washington,DC
AerospaceSpecificationMetalsIncn.d.,AISI4130Steel,normalizesat870C,viewed22May2013,
http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=m4130r
KeytoMetals2010,Aircraftandaerospaceapplications:part1,viewed22May2013,
http://www.keytometals.com/Article95.htm
AerospaceSpecificationMetalsIncn.d.,Aluminum2017T4,viewed22May2013,
http://asm.matweb.com/search/SpecificMaterial.asp?bassnum=MA2017T4
MaterialReferencen.d.,GeneralAluminiumInformation,viewed22May2013,
http://www.metalreference.com/INFO_Aluminum.html
Rothbart,HA2004,Camdesignhandbook,McGrawHill,NewYork
67
Woodman,H1997,Windsockminidatafile15:Spandauguns,AlbatrosProductions,Berkhamsted
Norton,RL2009,Kinematicsanddynamicsofmachinery,McGrawHill,NewYork
LakeheadSchoolsn.d.,Fivekeyequationsformotionwithuniformacceleration,viewed27May
2013,
http://www.lakeheadschools.ca/scvi_staff/brecka/Gr11_physics_web/downloadable_content/unit1
/text1/phys11_1_5.pdf
AllstarNetwork,2004,AircraftThrustcalculationsLevel3,viewed27May2013,
http://www.allstar.fiu.edu/aero/Propulsion2.htm
NASAn.d.,Propelleranalysis,viewed27May2013,http://www.grc.nasa.gov/WWW/k
12/airplane/propanl.html
Fr.Frog2012,Ballisticcoefficienttables,viewed27May2013,
http://www.frfrogspad.com/bcdata.htm
King,W2011,Dragcoefficientsofbullets,arrowsandspears,viewed27May2013,
https://sites.google.com/site/technicalarchery/technicaldiscussions1/dragcoefficientsofbullets
arrowsandspears
Cengel,YA2006,Heatandmasstransfer:apracticalapproach,McGrawHill,NewYork
Aten,M&Engels,A2002,FokkerEIIIindetail:bilingualeditionwithGermanandEnglishtext,San
DiegoMuseum,SanDiego
68
15. AppendixA:MatlabPrograms
SliderCrankCalculator
%Cal cul at e changes i n angl es necessar y
cl c
cl ear al l
%i ni t i al hor i zont al l engt h
dst ar t = 232. 64/ 1000
%angl e of a
t het a2 = 75. 5
%conver t t o r adi ans
t h2 = t het a2* pi / 180;
%Def i ne l i nk l engt hs
a = 40/ 1000
c = 10. 35/ 1000
b = sqr t ( ( dst ar t ^2) +( ( a- c) ^2) )
%Cal cul at e t het a 3
ar g = ( ( a*si n( t h2) - c) / b) ;
t h3 = asi n( - ar g) +pi ;
t het a3= t h3*( 180/ pi )
%cal cul at e new d
d = a*cos( t h2) - b*cos( t h3)
di sp( ' $$$$$$$$$$$$$$$$$$$' )
%cal cul at e di st ance moved
der r = 1000*( d- dst ar t )
%show change i n angl e
change= 90- t het a2
Camdesigncalculator
%Def i ne Var i abl es
cl c
cl ear al l
x=2;
st ep = 2
t het = ( x) *( pi / 180) ;
di sp( ' t het a' )
di sp( t het )
bet a = pi / 2;
di sp( ' bet a' )
di sp( bet a)
h=10;
di sp( ' Ri se' )
di sp( h)
c = 0
%Wr i t e equat i ons
f or c = 0: 45
di sp( ' @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@' )
c = c+1
i f ( 0<=t het ) &( t het <=( bet a/ 8) )
di sp( ' 0<=t het a<=bet a/ 8' )
y = h*( ( ( pi / ( 4+pi ) ) *( t het / bet a) ) -
( ( 1/ ( 4*( 4+pi ) ) ) *si n( 4*pi *( t het / bet a) ) ) ) ;
di sp( ' %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%' )
di sp( ' Angl e' )
di sp( x)
di sp( ' y' )
69
di sp( y)
el sei f ( ( bet a/ 8) <t het ) &( t het <=( ( 7/ 8) *bet a) )
di sp( ' bet a/ 8<t het a<=( 7/ 8( bet a) ) ' )
y = h*( ( 2/ ( 4+pi ) ) +( ( pi / ( 4+pi ) ) *( t het / bet a) ) -
( ( 9/ ( 4*( 4+pi ) ) ) *si n( ( ( ( 4*pi ) / ( 3) ) *( t het / bet a) ) +( pi / 3) ) ) ) ;
di sp( ' %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%' )
di sp( ' Angl e' )
di sp( x)
di sp( ' y' )
di sp( y)
el sei f ( ( 7/ 8) *bet a<t het ) &( t het <=bet a)
di sp( ' ( 7/ 8) bet a<t het a<=bet a' )
y = h*( ( 4/ ( 4+pi ) ) +( ( pi / ( 4+pi ) ) *( t het / bet a) ) -
( ( 1/ ( 4*( 4+pi ) ) ) *si n( 4*pi *( t het / bet a) ) ) ) ;
di sp( ' %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%' )
di sp( ' Angl e' )
di sp( x)
di sp( ' y' )
di sp( y)
end
x=x+st ep;
t het = ( x) *( pi / 180) ;
end
di sp( ' Al l i s wel l ' )
70
16. AppendixB:MachiningQuote
Component Machining
Type
Time(minutes) Amount Cost(R)
Pulley 30 2 200
Size Lathe 10
Hole Lathe 10
Radius Lathe 10
PulleyBush1 40 1 133.33
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
PulleyBush2 50 1 133.33
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
TopConnector 125 1 416.67
Cutting 10
Sizing Lathe 10
Flatsurfaces Milling 70
Drilling Milling 20
EndRadius Milling 15
EngagerBush 40 2 266.67
Cutting 10
Turning Lathe 10
Drilling Milling 20
Followerholder 160 1 533.33
Cutting Lathe 10
ShaftTurning Lathe 30
EndTurning Lathe 10
Flatend Milling 30
Wheelholder
Shoulder
Milling 60
Drilling Milling 20
FollowerRodEnd 80 2 533.33
Cutting Lathe 10
Length Lathe 10
Turning Lathe 20
Flatfaces Milling 30
Drilling Milling 10
Rodendbush 40 4 533.33
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
FollowerWheel 45 150
Cutting Lathe 10
Hole Lathe 10
Finishing Lathe 25
FollowerBush 40 2 266.67
Size Lathe 10
71
Hole Lathe 10
Stepcut Lathe 20
Component Machining
Type
Time(minutes) Amount Cost(R)
JournalBearing
Housing
210 3 2100
Cutting 10
Sizing Milling 30
Hole Milling 30
Corners Milling 60
Radius Milling 45
Holes Milling 35
Journalbearing 60 3 600
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
Grooves Lathe 20
EngagerPushrod 80 1 266.67
Cutting Lathe 10
Length Lathe 10
Turning Lathe 20
Flatfaces Milling 30
Drilling Milling 10
MiddlePushRod 80 1 266.67
Cutting Lathe 10
Length Lathe 10
Turning Lathe 20
Flatfaces Milling 30
Drilling Milling 10
Middlepushrod
bush
40 2 266.67
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
RodEnd 80 2 533.33
Cutting Lathe 10
Length Lathe 10
Turning Lathe 20
Flatfaces Milling 30
Drilling Milling 10
TopRockerBush 40 2 266.67
Size Lathe 10
Hole Lathe 10
Stepcut Lathe 20
TopRocker
Washer
20 1 66.67
Size Lathe 10
Hole Lathe 10
TriggerSupport2 100 333.33
Cutting 10
72
Size Milling 30
Hole Milling 15
45angle Milling 15
Welding Welding 30
TotalCost 7866.67
73
17. AppendixC:Handdrawnmanufacturingdrawings
\Z
z
\z
J
co
z
\z
O
o
J
cct
UJ
J
F
F
LU
l-
ul
J
o-
n
()
\z
z
F
e.
=
a4
z
\Z
J
co
J
LU
F
n
5
f
&"
s
FT
*
k"q
cf
"{
s
&.
.tr
F*
I
r\&
*
f"l
{.
I
2
o
H
l-
tJ
{$
a
{rn}ffi0@
I
I
I
t
F+
8lo'9 |
b
\f,l
i*.l
\}
4
l&
&
,(,
"'*f
tn
J
J
{
e$
I
,^-
Q
z
u
z
-.t u-t
tJ-t
Ou
ffiz
Nu
6f
-t
{-r
u.u
I.IJ ITJ
FF
,\z
>o
=r y
i-\
*V
ii t!
frn
,)-
<t
l-- 1r
-t,
1
e{
<6
yg
E;
--J
2
n
3
o
-J
2
F{
iil
K
H
i5
-F
u.*
2..-
O9
zZ
==
HJ
!un
-|J
s
u,
o
fvl
5
(}rl
>H
P<
?o
n
:
;-
{i
\Z L./
v)a
&
t)
v.
tl
!
J Lr)
y-)
3<
-t-
iz
a
UJ
'r=
z_=
9;
ia
co
E<
r)E
FO
=Y- F ltl
LE
'L
-
sb
-)-
Ei=
l- V',
frfr
E>
>2
Z=
3
w
@
tL) 7
V' /\
\l )l
pH
2
1r
:
J
o
a
x
iy
z
u.
=
t'{
l4
.$
-t
w
o
o'
r-l
Ou
zz
ui U-l
Fl-
zz
III IIJ
oo
== FF
U1 V)
{-c.!c2u?oqc!Qo
.a*ooooo-N-
t|.l
(,
1
-6L/,
fis-REHEg=q
6''
;';
'
i
'
'
jO
-X.'.BsEEEi
H
-ecYb
t
o
3
tr
r-
ll
hb
63
Uc
o3
-+-
o
0t-
c(I)
o-c
)t-
co
O.:a
t:
o6
Er
*O
O+-
c'o)
3';
rJ6
53
d:
Yo
OC
EP
+_c
PO
--c
Q
-r-
a
:3
p
o
o)
I
.J'
.c
.a
o
O-C
33
E-
Oc
'-o
=c
gE
,.- il O
o
dc
E
3p
QE+
5cX
F.- v
y.e
3
F b;
u,-O
o=o
cA-
;>E
':t0)
H.= B
:E PE
O)'=
()
o i
F5E
O..a O
-c.c.r,-
3: 6
e?3
=++-
JloQ
t4 l- t-
L ,-rt
o# q)
E83
?::
-NCD\t
n
.ci
Y?
@
O
I
O
C'rl
o
cf)
c
()
o
-{-
o
-J
E
5
V
z
J
co
z
\Z
.J
6
tl-l
J
=
LU
LU
-J
o-
\J
U
\z
z
F
u.
3
v)
z
-l co
J
LU
E
F
5
(J
L
3
Itr
g!
co
O
p
N
@
C.l
D
()
O
t/,
lJ',
o
-J1
n
c!
_o
E
0)
tlt
E
c
tr-
tt,
o)
c
'5
o
cl
-o
E
o
tt,
t/1
I
C
itr
o
U
I
.sr
X
o_
=-}r'.
O
O
u)
+
c
E
)
o
c)
'e
0)
u.
!3
(l)
)
a.
q
dr
{*ll *
bH
Or*
Na
b4
-:f,.q" , 1
r+Ho-
llt ,4 w
Q3s
t
I
I
I
I
t
I
L:-,".
()
mj
"t
$
i
{/
i
id\
'J
i CIt
I
oa
i
t+.7
ri!
til
1 ;'r
j
tt
i
Ql
j
{r;i?Eb'Cgr
}
tr-
u ?se'b
Y
fll
,
!i
I
t
t
.{
I
n
'r
t
I
I
t
T
f
t
I
tl
I
I
I
i
I
I
I
I
I
I
I
I
I
I
I
I
t
I
I
i
i
t
I
t
I
t
t
'l
t
t
*+"-
"
*
1--
1
I
I
t
t
t
I
I
- *
t-
I
"
*;t* .
I
t
.I
I
{
t
I
u.
z
J
tl-l
LLI
Ou
U.z
IJ-J
-
NF
=?
L./ O-
J
{-r
uu
t-u trl
FF
96
=r
>fr
U.7r
V\J
HE
;
<=
7<
<6
-o
ZZ
;E
tr
o
1*
d
rtl
2
z
o
J
G-
{>
!*
d5
FF
FF
u.Z
2..
r"r L)
2z
2=
gJ
FIJ
0
rln
in
ci
s
>H
=<
<rJ
o
E_
Y?
;-
{i
\Z L./
u1 a
d
't)
v.
IJ
ti
J t-a,
y-J
)<
j,z
f
tt I
J=
za-
5X
ta
c9
E<
oE
l;;o
=l-
-ul Lw
2o-
sb
t-!
ru- ts
F- aa,
=E -^t l'tJ
E>
>2,
Z=
3
w
@
urz
v1 ta
\t !l
IIJ F
]U
[)u-J
o-O
u.
2
4
f
.J
o
o
:
7uJ
a>
z
u
=
f.l
b
J
"*
ln
o
r>
nl
Ou.
zz
uJ ul
FF
zz
LIJ LU
oo
== FF
,r', U')
{-c\e?q0gc.{Q"
vt*OOOOO-o.l-
llt
U
=
aoe
;^, aPERln
E9-9939Ho--
d'tit.'tltttO
-xo;BEEEg=
Y
-oYbc
LL
t
o
3
;
r-
ll
\L-
fo
5'3
Oc
o3
{-o
0) .-
cCI
)s-
co
a
:n
-- -C
5,n
uo
Er
*-O
o<-
c';
;';
o6
53
d:
Yo
Oc
?q)
L/ +-'
+c
P'cl
C,f
)r-
o=
-c3
p
o
o)
E
.tlt
.c
.g
o
o.C
ja3
t-
CIc
'-o
=C
gE
**l O
o
6-c
E
3p
QE+
'CF'
*.- V
\r
o)l
l- L-
L-
OT
ur-O
p;o
!E n
(/t
\J
-
)c
':t()
L
-,O
.<rt'- )
bPE
Ol'= o)
o is
b.;6
-r-vC
o.!2 o
!!-
}: U
pP3
*F-.-
.llat9
! l-l-
L,l
8ts
c(I)O
:95
-
(r{ CD
.s(l-
76
18. AppendixD:CADmanufacturingdrawings
A
-
A
S
C
A
L
E
6
:
1
S
E
C
T
I
O
N
A
N
6
0
.
1
A
A
( h 6 )
0
.
5
0
3
3
3
5
.
5
0
5
.
5
0
4
5
4
5
0
.
2
0
0
.
2
0
1 8
3
3
1 4 . 9 8 3
1 4 . 9 9 4
1 3
4
5
1
0
.
3
3
0
(
H
8
/
f
7
)
1
0
.
3
5
7
1
1
.
3
3
A A
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
1
.
R
e
p
o
r
t
s
\
D
e
t
a
i
l
D
r
a
w
i
n
g
s
\
t
o
p
j
o
u
r
n
a
l
b
e
a
r
i
n
g
T
e
s
t
L
a
s
t
s
a
v
e
d
3
0
M
a
y
2
0
1
3
0
2
:
5
3
:
4
9
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2
0
1
3
/
0
5
/
3
0
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
J
O
U
R
N
A
L
B
E
A
R
I
N
G
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
M
1 4
N
6
R
2
.
5
0
6
1 4
1 0
R
3
R M
E
N
G
A
G
E
R
R
O
D
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
3
/
0
5
/
3
0
2
:
1
0
.
3
0
.
2
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
3
.
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
0
.
1
+
/
-
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
A
3
2
.
0
1
.
2
0
.
8
0
.
5
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
4
.
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
1
.
R
e
p
o
r
t
s
\
D
e
t
a
i
l
D
r
a
w
i
n
g
s
\
E
n
g
a
g
e
r
R
o
d
L
a
s
t
s
a
v
e
d
3
0
M
a
y
2
0
1
3
0
2
:
0
7
:
0
4
P
M
0
-
6
6
-
3
0
3
0
-
1
0
0
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
A
I
S
I
4
1
3
0
S
t
e
e
l
,
a
n
n
e
a
l
e
d
a
t
8
6
5
C
N
6
R
2
.
5
0
2
0
5
7
.
5
0
1
7
2
2
0
1 2
7 . 4 8
79
19. AppendixE:AssemblyDrawings
83
20. AppendixF:Allcomponents
T
R
I
G
G
E
R
S
U
P
P
O
R
T
2
3
m
m
P
L
A
T
E
M
O
O
L
M
A
N
R
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
T
r
i
g
g
e
r
S
u
p
p
o
r
t
2
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
1
:
1
0
:
3
9
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
3
8
8
R
2
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
T
r
i
g
g
e
r
S
u
p
p
o
r
t
1
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
1
:
0
7
:
5
9
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 2
R
3
6
2
9
4
4
3
8
R
3
8
0
R
2
3
M
A
D
E
F
R
O
M
3
m
m
P
L
A
T
E
T
R
I
G
G
E
R
S
U
P
P
O
R
T
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
3
6 . 0 5
1 4
T
O
P
R
O
C
K
E
R
W
A
S
H
E
R
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
T
o
p
R
o
c
k
e
r
W
a
s
h
e
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
0
:
4
8
:
5
9
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
9 . 1 0
6 . 1 0
1 4 . 1 0
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
T
o
p
R
o
c
k
e
r
B
u
s
h
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
0
:
4
6
:
3
8
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
6
2
T
O
P
R
O
C
K
E
R
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
T
O
P
R
O
C
K
E
R
2
m
m
P
L
A
T
E
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
T
o
p
R
o
c
k
e
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
0
:
5
4
:
1
7
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
4
5
R
6
5 8
4 0
R
1
0
R
8
R
6
6
J
O
U
R
N
A
L
B
E
A
R
I
N
G
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
t
o
p
j
o
u
r
n
a
l
b
e
a
r
i
n
g
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
1
:
0
2
:
0
0
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1
0
.
3
3
1
1
.
3
3
1 8
4
5
3
3
.
1
0
3
1
2
.
6
0
3
.
5
0
4
.
8
0
3
.
4
0
5
.
3
0
0
.
2
0
1 5
1 4
0
.
5
0
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
2
9
0
5
4
4
5
2
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
M
O
O
L
M
A
N
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
+
/
-
0
.
1
0
.
2
0
.
3
0
.
5
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
R
S
p
r
i
n
g
R
e
a
r
L
a
s
t
s
a
v
e
d
3
0
M
a
y
2
0
1
3
1
0
:
1
9
:
4
2
P
M
A
3
2
.
0
1
.
2
0
.
8
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
M
2
0
1
3
/
0
5
/
2
7
S
P
R
I
N
G
H
O
L
D
E
R
2
0
1
7
-
T
4
R
1
0
T
O
L
E
R
A
N
C
E
S
M
O
O
L
M
A
N
0
.
1
R
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
+
/
-
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
2
9
0
5
4
4
5
2
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
S
p
r
i
n
g
h
o
l
d
e
r
L
a
s
t
s
a
v
e
d
3
0
M
a
y
2
0
1
3
1
0
:
1
4
:
4
3
P
M
0
-
6
6
-
3
0
3
0
-
1
0
0
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
M
4
0
2
4
1 5
R
1
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
R
o
d
E
n
d
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
0
:
4
4
:
0
2
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 4
1 6
1 4
8
R
2
R
1
2
1
6
1
5
R
1
R
O
D
E
N
D
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
R
3
3 2
R
2
1 7 . 5 0
7
2
6
6 . 7 5
6
R
P
U
L
L
E
Y
B
R
A
C
K
E
T
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
P
u
l
l
e
y
B
r
a
c
k
e
t
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
9
:
3
7
:
2
2
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
4
0
2
1 9 . 5 0
4
1
7
6
.
5
8
1
9
7
1
2
2
.
1
2
1
0
1
:
2
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
P
r
o
p
e
r
C
A
M
2
L
a
s
t
s
a
v
e
d
2
7
M
a
y
2
0
1
3
0
2
:
0
6
:
5
1
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1
6
1
7
1
:
2
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
P
i
p
e
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
9
:
2
0
:
2
7
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1
7
6
.
6
4
M
I
D
D
L
E
P
U
S
H
R
O
D
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
6
.
0
5
1
4
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
M
i
d
d
l
e
p
u
s
h
r
o
d
b
u
s
h
f
r
o
n
t
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
9
:
0
9
:
0
7
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2
2
.
5
0
1
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
M
i
d
d
l
e
p
u
s
h
r
o
d
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
9
:
1
8
:
1
0
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
5
6
1 0
1 4
7
6
2 . 5 0
5
0
.
6
7
A
I
S
I
4
1
3
0
S
T
E
E
L
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
M
I
D
D
L
E
P
U
S
H
R
O
D
9
R
2
.
5
0
2
0
R
3
1 4
1 4
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
L
a
s
t
p
u
s
h
r
o
d
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
9
:
0
2
:
4
1
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 2
2
0
5
7
.
5
0
1
7
2
0
2
R
2
.
5
0
R 2 . 5 0
1 4
6
1 0
R
3
J
O
U
R
N
A
L
B
E
A
R
I
N
G
H
O
U
S
I
N
G
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
J
o
u
r
n
a
l
b
e
a
r
i
n
g
h
o
u
s
i
n
g
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
8
:
5
5
:
0
7
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1
6
R
3
3
0
2
0
1
5
1 2
9
R
3
8
0
3 0
5
6
2
2 6
4
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
G
u
n
B
r
a
c
k
e
t
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
8
:
4
5
:
2
4
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2
R
2
2 4
R
3
2
R
5
4
1 8
5
R
3
1 5
6
1 2
2
4
.
1
0
8
0
.
4
0
7 . 2 0
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
W
h
e
e
l
B
u
s
h
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
5
:
1
8
:
3
8
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
F
O
L
L
O
W
E
R
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
9
1 2
1 3
1
0
4
5
F
O
L
L
O
W
E
R
W
H
E
E
L
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
-
T
4
A
L
U
M
I
N
I
U
M
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
W
h
e
e
l
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
8
:
3
5
:
2
5
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
8
9
R
O
D
E
N
D
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
r
o
d
e
n
d
b
u
s
h
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
4
:
5
9
:
5
5
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 1
6
3
3
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
r
o
d
e
n
d
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
5
:
0
9
:
0
9
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
4
5
R
3
1 1
F
O
L
L
O
W
E
R
R
O
D
E
N
D
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
1
7
6
R
3
6
F
O
L
L
O
W
E
R
R
O
D
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
1
5
1 1
1
:
2
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
r
o
d
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
5
:
1
5
:
2
2
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
7
0
1
7
1
4
6
1
7
R
3
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
H
o
l
d
e
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
4
:
5
5
:
0
5
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 5
R
3
1 1
3
R
2
R
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
F
O
L
L
O
W
E
R
G
U
I
D
E
1
1
0
0
A
L
U
M
I
N
I
U
M
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
F
o
l
l
o
w
e
r
G
u
i
d
e
B
e
t
t
e
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
4
:
4
1
:
3
4
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
E
n
g
a
g
e
r
b
u
s
h
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
3
:
2
8
:
4
3
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
R
E
N
G
A
G
E
R
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
1
1
0
0
-
O
A
L
U
M
I
N
I
U
M
4
3
0
5
E
N
G
A
G
E
R
2
m
m
P
L
A
T
E
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
2
0
1
7
-
T
4
A
L
U
M
I
N
I
U
M
2
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
e
n
g
a
g
e
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
3
:
3
8
:
1
2
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2 5
7
5
6 6 . 8 0
1
8
4
1 5
4
4 6 . 3 0
5
5
5
.
1
0
R
T
O
P
C
O
N
N
E
C
T
O
R
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
A
I
S
I
4
1
3
0
S
T
E
E
L
1
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
C
o
n
n
e
c
t
o
r
T
o
p
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
3
:
2
5
:
4
4
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
8
9
.
5
0
1
2
5
.
2
0
R
5
1 0
1
2
8
1
0
1
5
1
3
8
6
R
C
A
B
L
E
C
O
N
N
E
C
T
O
R
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
C
a
b
l
e
c
o
n
n
e
c
t
o
r
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
3
:
1
7
:
0
1
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 1
1 9 . 5 0
3
0
1
5
1
0
R 2
8
4
4
.
6
0
R
B
O
T
T
O
M
P
U
L
L
E
Y
B
U
S
H
2
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
1
1
0
0
A
L
U
M
I
N
I
U
M
5
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
B
o
t
t
o
m
p
u
l
l
e
y
b
u
s
h
2
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
2
:
4
4
:
5
6
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
2
.
2
5
2
.
1
0
0
.
3
0
5 . 4 0
6
1 0
B
O
T
T
O
M
P
U
L
L
E
Y
B
U
S
H
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
R
1
1
0
0
A
L
U
M
I
N
I
U
M
5
:
1
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
0
.
2
0
.
3
0
.
5
0
.
8
1
.
2
2
.
0
A
3
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
B
o
t
t
o
m
p
u
l
l
e
y
b
u
s
h
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
2
:
3
8
:
2
1
P
M
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 0
5 . 4 0
6
1
0
.
3
0
2
.
1
0
4
4
.
6
0
R
B
O
T
T
O
M
P
U
L
L
E
Y
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
A
I
S
I
4
1
3
0
S
T
E
E
L
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
B
o
t
t
o
m
p
u
l
l
e
y
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
3
:
0
4
:
3
6
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
5
1
3
.
2
5
7
1
8
3
m
m
P
L
A
T
E
7 2
3
0
.
7
0
4
2
4
2
7
4
.
5
0
2
6
5
6
.
1
5
2
4
5
2
1
.
6
5
6
3
9
3
.5
0
5
.1
0
R
4
R
B
A
S
E
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
1
:
2
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
B
a
s
e
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
2
:
2
8
:
1
8
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1
5
2 2
5
.
1
0
4
2
9
6
0
3
5
2
1 6
3
2 2
5
.
1
0
2
3 6
2
:
1
A
3
2
.
0
3
0
0
0
-
P
L
U
S
A
N
G
L
E
S
+
/
-
0
.
1
I
T
E
M
N
O
I
T
E
M
N
R
Q
U
A
N
T
I
T
Y
A
A
N
T
A
L
D
E
S
C
R
I
P
T
I
O
N
B
E
S
K
R
Y
W
I
N
G
M
A
T
E
R
I
A
L
M
A
T
E
R
I
A
A
L
P
A
R
T
N
R
O
N
D
E
R
D
E
E
L
N
R
S
U
R
N
A
M
E
V
A
N
I
N
I
T
I
A
L
S
V
O
O
R
L
E
T
T
E
R
S
S
T
U
D
E
N
T
E
N
R
S
T
U
D
E
N
T
E
N
O
D
I
S
C
I
P
L
I
N
E
R
I
G
T
I
N
G
D
R
A
W
I
N
G
N
R
T
E
K
E
N
I
N
G
N
R
T
I
T
L
E
T
I
T
E
L
D
A
T
E
D
A
T
U
M
P
R
O
J
E
C
T
I
O
N
P
R
O
J
E
K
S
I
E
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
A
n
g
l
e
2
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
2
:
1
3
:
4
0
P
M
0
-
6
6
-
3
0
3
0
-
1
0
0
1
0
0
-
3
0
0
3
0
0
-
1
0
0
0
1
0
0
0
-
3
0
0
0
S
C
A
L
E
S
K
A
A
L
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
R
2
9
0
5
4
4
5
2
A
N
G
L
E
2
M
O
O
L
M
A
N
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
R
A
N
G
L
E
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
A
n
g
l
e
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
0
2
:
0
7
:
2
9
P
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
3 6
3
2 2 2
R
3
5
.
1
0
9
3
5
1
0
2 2
6
0
4
2
5
.
1
0
R
2
2
R
1
R
2
1
.
3
B
R
A
C
K
E
T
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
T
4
A
L
U
M
I
N
I
U
M
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
2
1
.
3
B
r
a
c
k
e
t
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
1
:
3
7
:
0
4
A
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
5
.
1
0
R
3
R
2
2
5
.
1
0
R
1
1
2
6
0
4
2
1 8
9
2
:
1
A
N
G
L
E
S
3
0
0
0
-
P
L
U
S
0
.
1
+
/
-
I
T
E
M
N
R
I
T
E
M
N
O
A
A
N
T
A
L
Q
U
A
N
T
I
T
Y
B
E
S
K
R
Y
W
I
N
G
D
E
S
C
R
I
P
T
I
O
N
M
A
T
E
R
I
A
A
L
M
A
T
E
R
I
A
L
O
N
D
E
R
D
E
E
L
N
R
P
A
R
T
N
R
V
A
N
S
U
R
N
A
M
E
V
O
O
R
L
E
T
T
E
R
S
I
N
I
T
I
A
L
S
S
T
U
D
E
N
T
E
N
O
S
T
U
D
E
N
T
E
N
R
R
I
G
T
I
N
G
D
I
S
C
I
P
L
I
N
E
T
E
K
E
N
I
N
G
N
R
D
R
A
W
I
N
G
N
R
T
I
T
E
L
T
I
T
L
E
D
A
T
U
M
D
A
T
E
P
R
O
J
E
K
S
I
E
P
R
O
J
E
C
T
I
O
N
S
K
A
A
L
S
C
A
L
E
1
0
0
0
-
3
0
0
0
3
0
0
-
1
0
0
0
1
0
0
-
3
0
0
3
0
-
1
0
0
6
-
3
0
0
-
6
C
:
\
U
s
e
r
s
\
R
e
n
i
e
r
\
D
o
c
u
m
e
n
t
s
\
c
l
i
c
k
U
P
\
M
O
X
4
1
0
\
C
A
D
\
F
i
n
a
l
\
2
D
D
R
A
W
I
N
G
S
\
1
0
B
r
a
c
k
e
t
2
L
a
s
t
s
a
v
e
d
2
6
M
a
y
2
0
1
3
1
1
:
2
7
:
2
4
A
M
A
3
2
.
0
1
.
2
0
.
8
0
.
5
0
.
3
0
.
2
U
N
I
V
E
R
S
I
T
E
I
T
V
A
N
P
R
E
T
O
R
I
A
U
N
I
V
E
R
S
I
T
Y
O
F
P
R
E
T
O
R
I
A
F
R
O
M
-
T
O
1
T
O
L
E
R
A
N
C
E
S
V
O
L
T
O
O
I
T
I
T
E
L
B
L
O
K
I
N
S
W
A
R
T
I
N
K
/
C
O
M
P
L
E
T
E
T
I
T
L
E
B
L
O
C
K
I
N
B
L
A
C
K
I
N
K
I
u
n
d
e
r
s
t
a
n
d
w
h
a
t
p
l
a
g
i
a
r
i
s
m
i
s
a
n
d
a
m
a
w
a
r
e
o
f
t
h
e
U
n
i
v
e
r
s
i
t
y
s
p
o
l
i
c
y
i
n
t
h
i
s
r
e
g
a
r
d
.
1
.
I
d
e
c
l
a
r
e
t
h
a
t
t
h
i
s
d
r
a
w
i
n
g
i
s
m
y
o
w
n
o
r
i
g
i
n
a
l
w
o
r
k
.
2
.
I
h
a
v
e
n
o
t
u
s
e
d
a
n
o
t
h
e
r
s
t
u
d
e
n
t
s
p
a
s
t
w
o
r
k
t
o
h
a
n
d
i
n
a
s
m
y
o
w
n
.
3
.
I
h
a
v
e
n
o
t
a
l
l
o
w
e
d
,
a
n
d
w
i
l
l
n
o
t
a
l
l
o
w
,
a
n
y
o
n
e
t
o
c
o
p
y
m
y
w
o
r
k
4
.
w
i
t
h
t
h
e
i
n
t
e
n
t
i
o
n
o
f
p
a
s
s
i
n
g
i
t
o
f
f
a
s
h
i
s
o
r
h
e
r
o
w
n
w
o
r
k
.
1 5
4
8
.
7
0
3
0
.
7
0
9
2
R
2
R
3
R
5
.
3
5
2
5
.
1
0
R
1
0
B
R
A
C
K
E
T
M
O
O
L
M
A
N
2
9
0
5
4
4
5
2
2
0
1
7
-
T
4
A
L
U
M
I
N
I
U
M
120
21. AppendixG:ProjectProtocol
Author: R.Moolman Signature:_____________________
StudentNumber: 29054452
Lecturer: Mr.FPietra Signature:_____________________
DateofSubmission: 1March2012
ProblemStatement
DuringWorldWar1,theFokkerE.IIIwasthefirstairplaneequippedwithasynchronisingmechanism
allowingthemachineguntofireinbetweenthepropellerbladeswithoutdamagingit.This
revolutionisedaerialcombat.Thegoalofthecurrentprojectistodesignthemechanismthatallows
themachineguntofirethroughthepropellerdiskwithoutdamagingit.
ScopeoftheProject
Theprojectissetin1915,disallowinganytechnologynotavailableatthetime,likeelectronictiming.
Materialssuchasplasticandcarbonfibrearealsonotallowed,astheyweredevelopedafter1915.
Thelubricationthatisusedinthesystemisallowedtobemodern,asitwillnotgreatlyaffectthe
coreofthedesignandhistoricalresearchoflubricationisoutsidetheprojectscope.
TheprojectisdependentonseveralcharacteristicoftheFokkerE.III,whichwillberesearched
beforethedesigncantrulystart.Theseaspectsare:
- Dimensionsoftheplane(Schematicsshouldberesearched)
- ServicelifeofaplaneinWorldWar1
- Engineschematics
- Mountingpositionofmachinegun
- Triggermechanismusedinoriginalplane
- Enginerevolutionrange
Topicsmaybeaddedtothislistastheprojectdevelops.
Thedesignrequirementsforthegunsynchronisationmechanismalsohavetobedefined:
- Themechanismhastoconnectthefirebuttononthejoystickwiththemachineguntrigger,
disconnectingitwhenneeded
- Thedesignmustbeadaptabletootherplaneswithminimaladaptation
- Thedesignshouldhaveawaytoadjustandfinetunethetiming.
- Thegunhastobeabletofirethroughthepropellerdiskovertheentirerevolutionrangeof
theengine
121
- Themechanismhastolastaslongastheexpectedservicelifeoftheengine
- Theentireassemblyshouldbeaslightaspossible
Theserequirementswillbethebaselineforthedesign.Thedetailsofthedesignwillbefinalised
withinthisframework.
Thefinaldesignmustinclude:
- Adrawingoftheentiresystemincludingallcomponentsandsizes
- Specificmaterialstobeused,alongwithmanufacturingmethods
- Costestimationoftheproduct(inmodernterms)
- AreportasspecifiedintheMOX410studyguide
ImportantDates
Protocolhandin: 1March2013
Firstprogressreport: 5April2013
Secondprogressreport: 3May2013
Selectdrawingsforevaluation: 13May2013
Submissionofdeliverables: 2731May2013
Examination: 21June2013
Supplementary: 22July2013
TheGanttchartdescribesthefinerdetailsofhowtheprojectwillprogressbetweentheseimportant
dates.
122
GanttChart
123
22. AppendixH:Firstprogressreport
Currentstatusoftheproject
Upuntilnow,themajorityoftheworkdoneontheprojectconsistedofresearch.TheGanttchart
putsasidetimeforresearchthroughouttheproject,asalldecisionsmadeindesignwillreston
researchdone.ThetaskofresearchingaplanethatwasbuiltinWorldWar1howeverismore
difficultthanonemightthink.
Initialresearchontheplanewentquickly,generalinformationwaseasytofind.Theproblemcame
whenmoredetailedinformationwasrequired.Verylittleinformationshowingdetailsoftheplane
couldbefound.Thislackofcredibleinformationdelayedtheprojectconsiderably,asthesedetails
wereneededtogenerateconcepts.Itwasonlyafteralotofresearchandmanydeadendsthat
credibleinformationwasfoundandeventhen,itwaslessthanwashopedfor.
Asaresultofthedifficulties,theprojectisbehindschedule.Generalconceptshavebeendrawnup,
butitisdifficulttocontinuewithoutmakingcertainassumptionsabouttheaircraft,evenwiththe
informationthatwasfound.ThedetaildesignphaseontheGanttchartwasassignedmoretime
thanwasnecessary,whichgivessomeleewaytocatchup.
Thoughtheprojectisbehindschedule,alotofinformationthatisnecessaryforthedesignhasbeen
found.Informationonthearmament,powerplantandairframehasbeenfound.Theinformation
thatwasfoundshowssomedetailsoftheplane,butcompletedrawingsoftheairframeandengine
mountingarestilllacking.Thisinformationwillbenecessarytocompletethefinaldesign.Ifno
furtherinformationcanbefoundontheairframe,certainassumptionsandapproximationswillbe
madetoaccountforthisshortage.
Workthatneedstobedone:
Theimmediatefocuswillbetofinalisetheconceptdrawingsofthemechanism.Onceallthe
conceptshavebeengenerated,thebestconceptwillbeselectedanddetaildesigncanbegin.
Thedetaildesignwillincludedrawingselectedcomponentsbyhand,doingcalculationsonthe
strengthofcomponentsandservicelife,aswellasdrawingtheentiremechanisminSolidWorks.
Oncethedesignhasbeencompleted,thereportontheprojectcanbewritten,detailingallthework
andtheprocessesthatwerefollowedtoachievethefinaldesign.
124
23. AppendixI:SecondProgressReport
CurrentStatusoftheproject
Whenthepreviousprogressreportwassubmitted,theprojectwaslaggingbehindtheplanneddates
ontheGanttChart.Inthetimebetweentheseprogressreports,theworktempowasgreatly
increased,withtheresultbeingthattheprojectisnowbackonschedule.
Afunctionalanalysiswasdoneonthesysteminordertodeterminehowtobreakdowntheconcepts
intocriteriathatcouldbecompared.Oncethefunctionalanalysishadbeendone,theconceptsthat
hadbeengeneratedwereexpandeduponandthencomparedinordertoselectthebestone.The
selectionwasmadeusingapointsystemtogaugetheprosandconsofeachdesign.
Onceaconcepthadbeendecidedupon,thestructureoftheplanethatwasrelevanttothe
mechanismhadtobedrawn.Thiswasaverydifficulttasktoaccomplish.Drawingswithsome
degreeofdetailwerefound,butsomeofthedimensionshadtobetakenfromphotosusing
photogrammetrysoftware.Theendresultisanairframethatisaccuratetoafairdegreeof
confidencewithallthedetailsrelevanttothemechanismbeingdesigned.
Oncetheairframewasdrawn,thedetaileddesignoftheentiremechanismstarted.Todate,the
majorityofthemechanismhasbeencompleted,alongwithallthemountingpointsthatconnectit
totheframe.AllofthesedrawingshavebeendoneinSolidWorks.Drawingthemechanismtofitthe
frameoftheplanehasprovedchallenging,asweightistobelimited.
Thedesignofthecamontheengineisbeinggivensomespecialattention,asitisapartthatcanbe
analysedwithhandcalculationsforamoreaccuratedesign.Toaidthisprocess,theCamDesign
Handbookwasdownloaded.Thetheorybehindcamdesigniscurrentlybeingstudied.
Workthatneedstobedone
TheimmediatefocusistofinishdrawingthemechanisminSolidWorks.Asimplifiedversionofthe
machinegunwillalsobedrawnontheplaneforillustrativepurposes.Oncethemechanismisdrawn,
thecamwillbedesignedindetail.Alongwiththecamdesign,oneotherpartwillbeselectedto
undergoFEA.Inadditiontothesecalculations,somebasicbucklinganalysismightbedoneonsome
partstodeterminerigidity.
Oncealltheanalysisisdone,2Ddrawingswillbemadeofalltheparts,withtwopartsbeinghand
drawn.Lastlythereporthastobewritten,thoughthiswillbestartedastheotherworkprogresses.
You might also like
- Thermodynamics TestDocument14 pagesThermodynamics TestRenier MoolmanNo ratings yet
- Manufacturing Process For CollarDocument5 pagesManufacturing Process For CollarRenier MoolmanNo ratings yet
- 53 Bevel Gear Support DrawDocument1 page53 Bevel Gear Support DrawFelipe KnorstNo ratings yet
- Machine Design NotesDocument2 pagesMachine Design NotesRenier MoolmanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- CW 3 - Non-Profit Making Organisation Sekolah Harapan Bangsa ACADEMIC YEAR 2020/2021Document3 pagesCW 3 - Non-Profit Making Organisation Sekolah Harapan Bangsa ACADEMIC YEAR 2020/2021Adrian WensenNo ratings yet
- Door LockDocument102 pagesDoor LockNicolás BozzoNo ratings yet
- Xanh Dương Và Trắng Đơn Giản Khởi Nghiệp Kinh Doanh Bản Thuyết Trình ĐộngDocument18 pagesXanh Dương Và Trắng Đơn Giản Khởi Nghiệp Kinh Doanh Bản Thuyết Trình Độngmai nguyễnNo ratings yet
- 1706181087812Document20 pages1706181087812maheshmonu9449No ratings yet
- CasaGrande BrochureDocument23 pagesCasaGrande BrochuresubbuNo ratings yet
- Promax Reference PDFDocument32 pagesPromax Reference PDFfarkli88No ratings yet
- Solve A Second-Order Differential Equation Numerically - MATLAB SimulinkDocument2 pagesSolve A Second-Order Differential Equation Numerically - MATLAB Simulinkmohammedshaiban000No ratings yet
- Ordinary Differential Equations Multiple Choice Questions and Answers - SanfoundryDocument7 pagesOrdinary Differential Equations Multiple Choice Questions and Answers - SanfoundrySaiman PervaizNo ratings yet
- CF34-10E LM June 09 Print PDFDocument301 pagesCF34-10E LM June 09 Print PDFPiipe780% (5)
- Modelling and Simulation of Armature ControlledDocument7 pagesModelling and Simulation of Armature ControlledPrathap VuyyuruNo ratings yet
- List of Medical Institutions Available For Foreign Language(s)Document24 pagesList of Medical Institutions Available For Foreign Language(s)leithNo ratings yet
- DZF 6050Document13 pagesDZF 6050Kevin José SánchezNo ratings yet
- Crime MappingDocument13 pagesCrime MappingRea Claire QuimnoNo ratings yet
- Con Law Koppelman HugeDocument203 pagesCon Law Koppelman HugemrstudynowNo ratings yet
- Random Number GeneratorsDocument13 pagesRandom Number GeneratorsTassy Nokuthanda ChipofyaNo ratings yet
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Prànita Vailaya100% (1)
- Caso Contra Ángel Pérez: Respuesta de La Fiscalía A Moción de La Defensa Sobre Uso de FotosDocument8 pagesCaso Contra Ángel Pérez: Respuesta de La Fiscalía A Moción de La Defensa Sobre Uso de FotosEl Nuevo DíaNo ratings yet
- JavaDocument14 pagesJavaGANESH REDDYNo ratings yet
- Oman Vision 2040 Vision Document 8Document27 pagesOman Vision 2040 Vision Document 8Abdul Aziz AlbalushiNo ratings yet
- 4 5827923419810760428Document250 pages4 5827923419810760428T M Santhosh KumarNo ratings yet
- Architect Strengths and Weaknesses - 16personalitiesDocument4 pagesArchitect Strengths and Weaknesses - 16personalitiesIsaacNo ratings yet
- 2.21 - Hazard Identification Form - Fall ProtectionDocument3 pages2.21 - Hazard Identification Form - Fall ProtectionSn AhsanNo ratings yet
- Information For Producers of Emergency Fittings Acc. To Iec 60598 2 22Document10 pagesInformation For Producers of Emergency Fittings Acc. To Iec 60598 2 22mohammed imran pashaNo ratings yet
- Beverage Companies in PakistanDocument3 pagesBeverage Companies in PakistanZeeshan JavedNo ratings yet
- Final Results Report: Curative Labs Inc. 3330 New York Ave NE Washington, DC 20002Document1 pageFinal Results Report: Curative Labs Inc. 3330 New York Ave NE Washington, DC 20002Aidan NicholsNo ratings yet
- Product Information Flyer: CIMSTAR® 10-570-HFP With FACT™Document2 pagesProduct Information Flyer: CIMSTAR® 10-570-HFP With FACT™sobheysaidNo ratings yet
- Misuse of InternetDocument22 pagesMisuse of InternetPushparaj100% (1)
- Least Used ProtocolsDocument3 pagesLeast Used ProtocolsJohn Britto0% (1)
- LCOE CHILE Ene - 11052401aDocument23 pagesLCOE CHILE Ene - 11052401aLenin AgrinzoneNo ratings yet
- 27 20130913 Kebijakan Inovasi Teknologi Untuk Pengelolaan Lahan Suboptimal Berkelanjutan-With-Cover-Page-V2Document12 pages27 20130913 Kebijakan Inovasi Teknologi Untuk Pengelolaan Lahan Suboptimal Berkelanjutan-With-Cover-Page-V2MeigimaesaNo ratings yet