Professional Documents
Culture Documents
Aerial Laser Scanning PDF
Aerial Laser Scanning PDF
Uploaded by
padurariurazvanOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Aerial Laser Scanning PDF
Aerial Laser Scanning PDF
Uploaded by
padurariurazvanCopyright:
Available Formats
Commission VI Special Interest Group Technology Transfer Caravan
Aerial Laser Scanning
Claus Brenner with contributions from George Vosselman and George Sithole
Institute of Cartography and Geoinformatics University of Hannover, Appelstr. 9a, 30167 Hannover, Germany claus.brenner@ikg.uni-hannover.de www.ikg.uni-hannover.de
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Contents
Airborne laser scanning principles Errors and strip adjustment Filtering of ALS data Extraction and modelling
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Airborne laser scanning principles
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
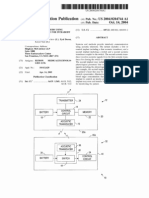
Basic components of an ALS system
DGPS Control & data recording INS
Laser Ranging unit Deflection unit
Ground
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Laser
Laser
Semiconductor lasers or Nd:YAG lasers pumped by semiconductor lasers Mostly Nd:YAG = neodymium-doped yttrium aluminium garnet, Nd:Y3Al5O12 Emits at = 1064 nm (near infrared) Bathymetric scanners often use = 532 nm (green) obtained by frequency doubling Others: e.g. 810 nm (ScaLARS), 900 nm (FLI-MAP), 1540 nm (TopoSys) Properties exploited: high collimation, high optical power
Pulsed (time of flight ranging) or continuous wave (CW, sidetone ranging)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Pulsed laser operation
Signal amplitude
Laser
tp
t trise
Typical characteristics:
Pulse width tp = 10 ns ( 3 m @ speed of light) Pulse rise time trise = 1 ns ( 30 cm @ speed of light) Peak power Ppeak = 2,000 W Energy per pulse E = Ppeak tp = 20 J Average power (@ pulse repetition rate F = 10 kHz) Pav = E F = 0.2 W
3m
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Ground
Commission VI Special Interest Group Technology Transfer Caravan
Continuous laser operation
Modulation signal
Laser
Signal amplitude
Ground
Modulation signal
Characteristics (ScaLARS):
Signal amplitude
Two modulation frequencies fhigh = 10 MHz, flow = 1 MHz short = 30 m, long = 300 m Average power (continuous operation) Pav = 0.26 W
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ambiguities (pulse)
Laser
Travelling time: h=R
ttravel =
Ground
2R c
Example: h = R = 1000 m ttravel = 6.7 s tp = 10 ns can be neglected Maximum pulse frequency (assuming no transmit / receive overlap):
AT
next pulse t ttravel tp t
AR
f max = 1 / ttravel =
c 2R
Example: h = R = 1000 m fmax = 150 kHz
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ambiguities (CW)
Laser
Maximum unambiguous range determined by long : Ground
Rmax =
Example:
long
2
AT
long = 300 m Rmax = 150 m
t
AR
Range gating: Known height, possible range differences < 150 m Range tracking: If no steps > 150 m are present
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanning mechanisms & ground patterns
Oscillating mirror Rotating polygon Nutating mirror (Palmer scan) Fiber switch
Deflection unit
Laser
(same for receiving optics)
Z-shaped, sinusodial
Parallel lines
Elliptical
Parallel lines
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Polygon mirror example
25 cm @ 0.5 mrad beam divergence
Deflection unit
/2=20 h=500 m 0.08 70 cm 364 m
500 pulses / line
1 cos 2 i
Swath width
0.08 79 cm Repetition rate 50 kHz, average pulse rate 25 kHz
2h tan = 0.7 h = 364m 2
50 lines / s 83 cm v = 150 km/h
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Fiber switch details (TopoSys Falcon)
Laser
Deflection unit
To ground and back
Receiver
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Fiber scanner example
Fiber 128 ...
Deflection unit
/2=7 h=500 m 0.25h / 127 = 0.002 h 1m
Fiber 3 spot diameter 25 cm Fiber 2
Swath width
Fiber 1 630 lines/s 11 cm v = 252 km/h
2h tan = 0.25h = 123m 2
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Palmer scan
7 deg. nutating mirror 30 deg. nutating mirror (hypothetical)
Deflection unit
Scan pattern with forward motion of aircraft (7 deg. nutating mirror)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Beam divergence
Laser beam widens with distance Beam divergence D, aperture diameter Theoretical limit by diffraction
2.44
Example: = 1064 nm, D = 10 cm 0.026 mrad
Typical values for ALS: = 0.3 2 mrad Ground spot diameter
DI
DI, diameter of illuminated area Ground
(not to scale)
= D + 2h tan( 2) 2h tan( 2) h
Example: = 1 mrad 1 m diameter @ h = 1 km flying height
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Power balance
Ar
4 - Power received:
Ar Pr = M M PT 2 R 2
1 - Power transmitted:
M 2 Ar = PT 2 R 2
PT
3 - Power reflected, assuming Lambertian surface:
PT = 2000 W Atmospheric transmission M = 0.8 Ar = 80 cm2 (Dr = 10 cm) R = 1 km Reflectivity = 0.5 Pr = 4 10-10 PT = 800 nW
M PT 2
2 - Power received: Ground
M PT
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reflectivity
Reflectivity vs. material
MATERIAL Dimension lumber (pine, clean, dry) Snow White masonry Limestone, clay Deciduous trees Coniferous trees Carbonate sand (dry) Carbonate sand (wet) Beach sands, bare areas in desert Rough wood pallet (clean) Concrete, smooth Asphalt with pebbles Lava Black rubber tire wall REFLECTIVITY @ = 900 nm 94% 80-90% 85% up to 75% typ. 60% typ. 30% 57% 41% typ. 50% 25% 24% 17% 8% 2%
Source: www.riegl.co.at
Range vs. reflectivity
M 2 Ar Pr = PT 2 2 R
120
Range factor [%] *
100 80 60 40 20
20
40
60
80
100
Target reflectivity [%]
* Normalized to 100% @ 80% reflectivity
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interaction with target
AT
t
AR
first pulse
last pulse
5m t tp Pulse width 10 ns 3 m @ speed of light h = 1.5 m pulses separable
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interaction with target
AT
t
AR,1
t1
Detection accuracy 10-15% t of rise time 2-5 cm
AR,2
t2
7 ns Measured range will be an intermediate value (mixed echo)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interaction with target
... t
AR
t Large area, small reflectivity Small area, large reflectivity (same for sloped terrain)
Minimum detectable object size depends on reflectivity Measured range depends on distribution of reflectivity inside laser ground spot area
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interaction with target
Canopy penetration gets worse with increasing scan angles
Specular reflection Water, wet surfaces, slate no return signal
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Pulse:
AT
Ranging
AT
CW:
Ranging unit
AR
t t t
AR
t t
Range
Range
R=
c t 2
c t 2 c 1 t rise 2 S/N
R=
1 short 2 2
Range resolution
Range resolution
R =
R =
short c 1 = 4 4 f high
short 1 4 S/N
Range accuracy
Range accuracy
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ranging: Pulse vs. CW
In CW ranging, resolution and accuracy can be improved by using higher modulation frequencies Resolution: CW, short = 30 m (10 MHz), /2 = 1/16384 (14 bit) R = 0.9 mm ! Cf. required time resolution for pulse ranging: t = 2 R / c = 6.1 ps (164 GHz) !
Ranging unit
For the accuracy, S/N is important depends on transmitted power, e.g. Pulse Ppeak = 2000 W vs. CW Pav = 1 W R,CW / R, pulse = 85, achieved by 2000 x power [Wehr, Lohr 99] Pulse lasers with high power are available CW semiconductor lasers with Pav > 2 W, fhigh > 10 MHz scarce R, pulse typically 2-5 cm Does not apply to centimetre level measurement in the close range domain!
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ranging: full waveform analysis
tree crown power line
Ranging unit
AR
bush
ground
First pulse t0
AR
Last pulse t1
t
Data recorder
1 GS/s t
Data recorder
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ranging: full waveform analysis
Ranging unit
Source: Riegl, 2006
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ranging: full waveform analysis
Ranging unit
Unlimited number of returns per shot Multiple target detection down 0.5 metres Surface roughness, slope Vegetation Discontinuities User-defined post-processing methods, no need for real time, neighbourhood analysis Riegl LMS-Q560, Litemapper 5600, Optech ALTM 3100, TopEye Mark II
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Examples of ALS
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanner examples
System Laser Altitude Range measurements Scan frequency Scan angle Pulse rate Beam divergence Beam pattern Optech ALTM 3100EA 1064 nm 80 3500 m up to 4 max. 70 Hz max. 25 max. 100 kHz 0.3 mrad oscillating, sawtooth Riegl LMS-Q560 near IR 30 1500 m full waveform max. 160 Hz max. 30 max. 100 kHz, 50 kHz @ 22.5 0.5 mrad rotating polygon, parallel TopoSys Falcon II 1540 nm 60 1600 m first and last max. 630 Hz 7 (fixed) 83 kHz 0.5 mrad fiber switch, parallel
Others: FLI-MAP (Fugro-Inpark), LiteMapper (IGI mbH), GeoMapper 3D (Laseroptronix), ALS series (Leica), TopEye MK II (TopEye AB)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Optech ALTM 3100
All images taken from www.optech.ca
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Riegl LMS-Q560 / LMS-Q280i
(Scanner & data recorder only)
Images taken from www.riegl.co.at
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
IGI LiteMapper
(uses scanners from Riegl)
Images taken from www.litemapper.com Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
TopoSys
Falcon II, III (fiber)
Harrier (uses scanners from Riegl)
Images taken from www.toposys.de Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
FLI-MAP
FLI-MAP 400
All images taken from www.flimap.com
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Errors and strip adjustment
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Errors and strip adjustment
Error sources Geometrical error budget Strip adjustment
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Coordinate systems
tIRFECF tARFIRF
DGPS INS
Laser Ranging unit Deflection unit
Inertial reference frame Moving with aircraft
Aircraft/ scanner reference frame Moving with aircraft
Earth centered reference frame ECEF, WGS84
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error sources
Laser measurement (range, angle: electronics aging & drift) DGPS (receiver, satellite constellation, ground reference constellation) INS (receiver: frequency, drift) Offset / alignment between GPS, INS, laser scanner Dynamic bend of IMU / scanner mounting plate Time synchronization and interpolation (GPS: 1-10/s, INS 200/s, turbulent flight) Transformation to local coordinate system
Basic geometric configuration
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error budget (geometry)
Z X0, Y0, Z0 h
Y X X
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
due to error in
Error budget (geometry)
0 0 0 20.9 7.5 16.1 0 20.9 0 0 14 1.3 2.5 0 5.6 12.1 0 0 0 4 8 5 5 4 cm 0 0 0 8 0 8 0 0 0 8 0 0 R X0 Y0 Z0 Total 22.4 23.6 27.6 26.4 26.4 26.5 9.4 11.7 17.0
Total @h=1000
53.0 56.2 66.6 63.5 63.5 63.6 9.4 19.1 37.3
15 30 0
15 30 0
15 30
Assumptions: h = 400 m (except last col. h = 1000 m), = = =0, = = 0.03, = 0.04, = 0.02, R = 5 cm, X0 = Y0 = Z0 = 8 cm
0-5 5-10 10-15 15+
Source: [Baltsavias, 1999a]
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error budget: conclusions
0 X 15 30 0 Y 15 30 0 Z 15 30 0 5.6 12.1 0 0 0 4 8 20.9 0 0 14 0 20.9 0 7.5 16.1 0 1.3 2.5 5 5 4 0 0 8 0 8 0 0 0 8 0 0 R X0 Y0 Z0 Total 22.4 23.6 27.6 26.4 26.4 26.5 9.4 11.7 17.0
Total @h=1000
53.0 56.2 66.6 63.5 63.5 63.6 9.4 19.1 37.3
Y slightly larger than X for small (due to error) changes for larger (due to error)
Source: [Baltsavias, 1999a]
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error budget: conclusions
0 X 15 30 0 Y 15 30 0 Z 15 30 0 5.6 12.1 0 0 0 4 8 20.9 0 0 14 0 20.9 0 7.5 16.1 0 1.3 2.5 5 5 4 0 0 8 0 8 0 0 0 8 0 0 R X0 Y0 Z0 Total 22.4 23.6 27.6 26.4 26.4 26.5 9.4 11.7 17.0
Total @h=1000
53.0 56.2 66.6 63.5 63.5 63.6 9.4 19.1 37.3
R has only marginal influence on Z and almost no influence on X, Y.
Source: [Baltsavias, 1999a]
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error budget: conclusions
0 X 15 30 0 Y 15 30 0 Z 15 30 0 5.6 12.1 0 0 0 4 8 20.9 0 0 14 0 20.9 0 7.5 16.1 0 1.3 2.5 5 5 4 0 0 8 0 8 0 0 0 8 0 0 R X0 Y0 Z0 Total 22.4 23.6 27.6 26.4 26.4 26.5 9.4 11.7 17.0
Total @h=1000
53.0 56.2 66.6 63.5 63.5 63.6 9.4 19.1 37.3
Z smaller than X, Y and less dependent on h Reason: R, Z0 dominate and are nearly independent of h Z mainly depends on Z0 (GPS!) (and R) for small
Source: [Baltsavias, 1999a]
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Error budget: conclusions
0 X 15 30 0 Y 15 30 0 Z 15 30 0 5.6 12.1 0 0 0 4 8 20.9 0 0 14 0 20.9 0 7.5 16.1 0 1.3 2.5 5 5 4 0 0 8 0 8 0 0 0 8 0 0 R X0 Y0 Z0 Total 22.4 23.6 27.6 26.4 26.4 X, Y 26.5 9.4 11.7 17.0
Total @h=1000
53.0 56.2 66.6 Z 63.5 63.5 63.6 9.4 19.1 37.3
Z given is too optimistic especially for sloped terrain, X, Y dominate
Source: [Baltsavias, 1999a]
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Counter measures
Constructional measures Highly stable mechanics, low drift in electronics, highly accurate time sync., internal reference measurement Calibration Factory calibration of laser scanner, GPS/INS alignment Flight specific measures Good satellite constellation, close reference station, little turbulence
Still systematic errors will remain, especially visible at strip overlaps strip adjustment
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Strip adjustment
Create a seamless data set by correcting for the systematic errors.
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Strip adjustment Analogy to independent model adjustment with selfcalibration parameters Modelling of shifts, drifts and other systematic errors Measurement of tie points Measurement of control points Adjust strips such that corresponding tie points are transformed to same terrain point misclosures at control points are minimal
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Strip adjustment
Independent strips with tie points Strips transformed to reference system
(ifp / J. Kilian)
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Strip adjustment
1D strip adjustment 3D strip adjustment Measurement of corresponding points in height data ditches and ridges in height data edges in reflectance data
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
1D adjustment only correct the height mathematical model for control point in strip s
H = a s + bs X
as bs cs Xsc , Ysc
c Xs
)+ c (Y
s
c Ys
offset in height tilt in flight direction tilt across flight direction centre of strip s
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
1D adjustment mathematical model for tie point between strip s and strip t
H = a s + bs X
t t
( ) + c (Y ) a b (X X ) c (Y Y )
c Xs c t s c Ys c t t
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Problems unmodelled errors lead to large distortions case: range offset or scale error in the scanning angle possible solutions: more reference points cross strips
before adjustment
after adjustment
tilt offset
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
3D adjustment
Modelling systematic errors in terrain coordinates: Approximation by 1st and 2nd order polynomials. Modelling the effect of sensor errors on terrain coordinates. 3D adjustment requires estimation of 3D offsets between overlapping strips strips and reference data.
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
3D adjustment
Two approaches: Take height differences in suitable areas as observations (cf. area based matching) First extract corresponding features, then use those as observations (cf. feature based matching)
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Segmentation of overlaps
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
(Slide provided by George Vosselman)
Commission VI Special Interest Group Technology Transfer Caravan
Offset estimation
Planimetric offsets may be estimated from sloped surfaces reflection data
Claus Brenner (Slide provided by George Vosselman) International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Offset estimation
Height differences only are not sufficient
flat roof
gable roof
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Measurement of tie points
Area based image matching Simple mathematical modelling Geometric transformation
X s = X t + X Ys = Yt + Y
Radiometric transformation
Z s ( X s , Ys ) = Z t ( X t , Yt ) + Z
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Using ditches
Fitting of point clouds to ditch profile model No data interpolation Noisy free gradients Better accuracy estimates
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Eelde dataset
Point density 1 pts / 3 m2 Strip width 225 m
Claus Brenner (Slide provided by George Vosselman) International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Ditch measurements
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
(Slide provided by George Vosselman)
Pixel size 2m
Commission VI Special Interest Group Technology Transfer Caravan
Point clouds
Original data
After fitting
Original data
After fitting
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Using gable roofs
Point density 6 pts/m2 Strip width 90 m Measurements 6 ridge lines
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
(Slide provided by George Vosselman)
Commission VI Special Interest Group Technology Transfer Caravan
Using gable roofs
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Pixel size 1 m
(Slide provided by George Vosselman)
Commission VI Special Interest Group Technology Transfer Caravan
Using gable roofs
Next strip overlap Measurements 10 ridge lines
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Using gable roofs
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Point clouds
Original data After fitting
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Offset estimation in reflectance data
Reflection data is noisy peak reflection strength, no integration low reflectance strength in case of multiple heights within footprint footprint much smaller than point distance needs to be modelled
Long edges are preferred
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Conclusions offset estimation Offsets estimated in height and reflectance data will be biased when using standard image matching tools. Offset estimations in height data should use continuous surfaces only. Fitting models to height data avoids interpolation errors. Modelling edge response in reflectance data allows unbiased offset estimation, but requires long edges.
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
3D strip adjustment results Model: 3 shifts, 3 rotations, and 3 rotation drifts Sensor Point density Flying height Number of strips Number of tie points before adjustment after adjustment Relative improvement FLI-MAP 5-6 pts/m2 110 m 2 75 15.2 cm 9.7 cm 36% Optech 0.3 pts/m2 500 m 4 46 35.6 cm 20.3 cm 43%
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
3D strip adjustment results FLI-MAP before adjustment after adjustment relative improvement Optech ALTM before adjustment after adjustment relative improvement x 16.4 11.2 32% x 48.6 26.0 47% y 20.0 11.6 42% y 40.5 24.5 40% z 5.0 4.7 6% z 11.6 8.5 27%
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Conclusions strip adjustment
Many errors may occur. Strip adjustment in combination with error models can eliminate most systematic errors. Strip adjustment can be used for data correction or as a quality control tool. Remaining systematic errors may reveal errors that are difficult to model. New errors are still discovered.
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering of ALS data
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering Introduction
Digital elevation model (DEM), digital terrain model (DTM): Ground Digital surface model (DSM): top surface In open terrain, the separation surface between air and bare earth DEM is different from measured laser points due to very different reasons: Measurement errors of ALS system (position, orientation, range) Interaction with target (mixed points in vegetation) Interpretation (buildings are not part of the DEM by definition) Filtering: classification of points into terrain and off-terrain Basis for DTM generation, detection of topographic objects
dy dx
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Raster
TIN
Commission VI Special Interest Group Technology Transfer Caravan
Filtering
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering
(Source: George Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering approaches
Basic approaches Mathematic morphology Progressive refinement Linear prediction Segmentation
Points / local neighbourhood vs. segments
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filtering of ALS data
Introduction Morphologic operators and slope based filtering (Vosselman, 2000) Linear prediction and hierarchic robust interpolation (Kraus & Pfeifer 1998, Pfeifer et al. 2001) Progressive TIN densification (Axelsson, 2000) Segmentation based filtering (Sithole, Vosselman 2005) ISPRS filter test
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Morphologic operators and Slope based filtering
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Erosion, dilation, opening, closing
Erosion and dilation for binary images I Image, s two-dimensional structure element Erosion:
1 if (i, j ) s : I (r + i, c + j ) = 1 ( I s )(r , c) := 0 else
Dilation:
1 if (i, j ) s : I (r + i, c + j ) = 1 ( I + s )(r , c) := 0 else
Opening:
I o s := ( I s ) + s
Closing:
I s := ( I + s ) s
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example: Opening (I)
I-s
I-s
I o s := ( I s ) + s
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example: Opening (II)
I-s
I-s
I o s := ( I s ) + s
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example: Opening (III)
I-s
I-s
I o s := ( I s ) + s
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Equivalent definitions using min and max
Erosion:
( I s )(r , c) := min I (r + i, c + j )
( i , j )s
1 if (i, j ) s : I (r + i, c + j ) = 1 ( I s )(r , c) := 0 else
Dilation:
( I + s )(r , c) := max I (r + i, c + j )
( i , j )s
Define kernel function k
0 (i, j ) s k (i, j ) := 1 else
Then, erosion and dilation are given by:
k(i) i
( I k )(r , c) := min[I (r + i, c + j ) k (i, j )]
(i , j )
( I + k )(r , c) := max[I (r + i, c + j ) + k (i, j )]
(i , j )
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Erosion using k(i,j)
I k
( I k )(r , c) := min[I (r + i, c + j ) k (i, j )]
(i , j )
k(i) i
I-k
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Morphological operators for grey scale images (here, DSM)
DSM
Erosion
k(i) i Dilation
DTM
Opening
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Original DSM
(opening)
11x11 m2
15x15 m2
21x21 m2
2 31x31 m Claus Brenner
International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Original DSM
(opening)
11x11 m2
15x15 m2
21x21 m2
2 31x31 m Claus Brenner
International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Original DSM
DTM obtained by opening
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Modification: dual rank filters
Minimum / maximum may be problematic if outliers are present Use of rank filters is more robust Rank function: returns the mth element of sorted values
Rm ({I1 , I 2 ,..., I n }) := ( Sort ({I1 , I 2 ,..., I n }))[m]
Then, erosion and dilation become
( I m k )(r , c) := Rm ({I (r + i, c + j ) k (i, j ) (i, j )}) ( I + m k )(r , c) := Rn +1 m ({I (r + i, c + j ) + k (i, j ) (i, j )})
Note: n = # zeros in k ,
1 , +1 +
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Modification: points, irregular data
Erosion (previously):
e(r , c) = ( I k )(r , c) = min (I (r + i, c + j ) k (i, j ) )
(i , j )
pi
pj
Now:
e( pi ) := min (h( p j ) k (xij , yij ) )
p j A
k (xij , yij )
Definition of the DEM:
DEM := p j h( p j ) e( p j )
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Slope based filtering (Vosselman, 2000)
e( pi ) := min (h( p j ) k (xij , yij ) )
p j A
k (xij , yij )
h
hmax (d )
Interpretation of k
k (x, y ) := hmax
( x
+ y 2 = hmax (d )
h1
d1 Points at distance d1 can be lower by h1 d
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Slope based kernel function
hmax (d )
DEM := p j h( p j ) e( p j )
Kernel function effectively suppresses slopes larger than its own slope
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Derivation of suitable kernel functions hmax
Idea 1: assume a maximum slope, e.g. 30%
Commission VI Special Interest Group Technology Transfer Caravan
hmax (d ) := 0.3d
Since measurements are noisy, add confidence interval. Allow 5% of terrain points (with standard deviation ) may be rejected
hmax (d ) := 0.3d + 1.65 2
hmax (d )
d Arbitrary specification try to obtain from data
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Derivation of suitable kernel functions hmax
Idea 2: derive maximum height differences from data Training set with ground points only For each distance interval d, compute max(h) Also compute variance (of the maximum) for each d using cumulative probability distribution
Commission VI Special Interest Group Technology Transfer Caravan
Fmax (h) = F (h) N
Idea 3: minimize classification errors Effect of type I and type II errors is the same search for h where
P( pi DEM h, d , p j DEM) = 0.5
Requires training set with ground points and unfiltered data of the same area
2
(Source: George Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Derivation of suitable kernel functions hmax
5m h
Commission VI Special Interest Group Technology Transfer Caravan
d 0m 10 m
P( pi DEM h, d , p j DEM)
Black 0.0, white 1.0
-5 m
(Source: George Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Derivation of suitable kernel functions hmax
4
Allowed height difference (m)
Commission VI Special Interest Group Technology Transfer Caravan
3
Maximum Probabilistic
0 0 2 4 6 8 10
Distance between points (m)
(Source: George Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example results
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
(Source: George Vosselman) Laser point density 5.6 points/m2. 2 m grid (top), 0.5 m grid (bottom). Maximum filter. Height difference of ditches: 0.5 m.
Commission VI Special Interest Group Technology Transfer Caravan
Example results
(Source: George Vosselman) Perspective view. Laser point density 5.6 points/m2 (top), reduced to 1 point/16m2 (bottom)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Linear prediction and Hierarchic robust interpolation
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation using a summation of kernel functions
z
2.5 2
1.5
(x1,z1)
?
(xn,zn)
1 2 3 4 5
0.5
-0.5
Given: Heights z at positions x:
z = ( z1
x = ( x1
z2 L zn )
x2 L xn )
Find an interpolating function:
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation using a summation of kernel functions
Idea: describe overall function as a sum of basis functions
f ( x ) = ki ( x)
i =1
Simpler: as a sum of identical basis functions k depending only on the distance x-xi multiplied by a factor mi
f ( x) = mi k ( x xi )
i =1
Example k(d)
k(d)
1 0.8 0.6 0.4 0.2
d
1 2
-2
-1
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation using a summation of kernel functions
Interpolation f has to pass through the given points
z j = f ( x j ) = mi k ( x j xi )
i =1
Written in matrix form
k ( x1 x2 ) k ( x1 xn ) z1 k (0) k (0) k ( x2 xn ) z2 k ( x2 x1 ) = M O M z k(x x ) k(x x ) L k (0) n n 1 2 n
Or, shorter
m1 m2 M m n
z = Km
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation using a summation of kernel functions
Solution (note: linear; exact solution)
m = K 1z
Function f
Or, shorter
m1 n m f ( x) = mi k ( x xi ) = (k ( x x1 ) k ( x x2 ) L k ( x xn ) ) 2 M i =1 m n f ( x) = k T K 1z
Note: x variable k depending on x K z fixed
1
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example using triangular kernel function
2.5
2.5
1.5
1.5
0.5
0.5
1 -0.5
1 -0.5
x = (1, 2, 2.5, 3, 4 ) z = (1, 2, 1.75, 2, 0 )
m = K 1z = (1, 2.25, 0.5, 2.25, 0 )
2.5
f ( x)
1 0.8 0.6 0.4 0.2 -2 -1 1
1.5
k(d)
0.5
d
2
-0.5
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example using Gaussian kernel function
2.5
1.5
1
0.5
-2
-4
1 -0.5 2 3 4 5
-6
x = (1, 2, 2.5, 3, 4 ) z = (1, 2, 1.75, 2, 0 )
m = K 1z = ( 0.29, 5.07, 6.49, 5.76, 1.53)
f ( x) k (d ) = e d
-2 -1
2.5
1.5
2
1 0.8 0.6 0.4 0.2 1
1
d
2
0.5
1 -0.5
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Statistical interpretation of Gaussian kernel function
Interpretation as covariance of laser points Pi , Pk having distance d
C ( Pi Pk ) := C (d ) = C (0) e
d c
C(0)
C(d)
Statistical surface description: close points have high covariance Need to determine C(0), c
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Determination of parameters of covariance function
After removal of trend (see later), zi coordinates contain measurement error ri systematic error si
zi = si + ri
Variance of zi :
Vzz
1 1 ( si si + 2 si ri + ri ri ) z z = i i n n 1 ( si si + ri ri ) = Vss + Vrr n
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Determination of parameters of covariance function
Determination of empirical covariances Cj Sort point pairs into buckets, according to their distance
d j d
Cj = 1 nj
Pi Pk
< d j + d
1 nj
In each bucket, determine empirical covariances
zi z k
s s
i k
Determine C(0)
2 C (0) = Vss = Vzz Vrr = Vzz Z
(using estimate Z of height error)
Determine cj for each bucket from
C j = C ( 0) e
dj cj
solve for c j
Determine c as weighted mean of cj
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation and filtering
After having determined Gaussian kernel function, interpolation is just as before:
f ( P ) = c T C 1z c T = C ( PP C ( PP2 ) L C ( PPn ) 1)
z T = ( z1
z2 L zn )
C (0) C(P C(P n) 1P 2) 1P C ( P2 P C (0) C ( P2 Pn ) 1) C = O M C ( P P ) C ( P P ) L C (0) n 1 n 2
What happens if we replace C by
Vzz Vss = C (0)
C(d) d
Vzz C(P C(P n) 1P 2) 1P C ( P2 P Vzz C ( P2 Pn ) 1) C = O M C(P P ) C(P P ) L Vzz n 1 n 2
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Interpolation and filtering
Note from earlier:
2 Vzz = Vss + Vrr = C (0) + Z
C = C + z2 I n
2.5
using C
2.5
using C
1.5
1.5
0.5
0.5
1 -0.5
5
-0.5
Interpolation and filtering: considers measurement errors Allows weighting of measurements using individual Vzz ,i
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Hierarchic robust interpolation
Kraus & Pfeifer 1998, Pfeifer et al. 2001 Before application, remove trend surface, e.g. by estimation of a low-degree polynomial After trend removal, 3 stages of refinement: Interpolation + filtering as just explained Robust interpolation compute weights for individual points (see next slides) Hierarchic robust interpolation if gross errors occur in large clusters compute data pyramid, use surfaces obtained in coarse level to accept points within tolerance band in higher resolution level
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Robust interpolation
2 Initial interpolation using unit weights i2 = 0
Outlier, probably vegetation Interpolation follows outlier
Result of interpolation + filtering
(Source: I.P.F. TU Vienna)
Trend surface
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Robust interpolation
Calculate filter values = oriented distance from surface to measured point Compute histogram of filter values Usually, asymmetric: many points above surface, few points below surface
(Source: I.P.F. TU Vienna)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Robust interpolation
Use asymmetric weight function (a,b different for left & right branch)
pi =
1 + (a f i g )
, =
2 i
02
pi
a, b parameters, g shift determined from histogram Also remove points which are too far off the surface
cutoff
(Source: I.P.F. TU Vienna) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Robust interpolation
Initial interpolation
Refined interpolation
(Source: I.P.F. TU Vienna)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filter results in forested area
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
(Source: I.P.F. TU Vienna)
Commission VI Special Interest Group Technology Transfer Caravan
Progressive TIN densification
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
TIN densification (Axelsson, 2000)
Start using sparse seed points lowest points in a large grid, based on largest structure, e.g. 50-100 m Densify iteratively from below calculate required thresholds from points currently included in the TIN add points to the TIN if they are within thresholds Threshold computation based on median values of surface normal angles and elevation differences. Uses histograms for computation of median.
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
TIN densification
Add one point at a time in each triangle facet Accept based on distance and angle threshold Special case for discontinuous surfaces (urban areas) threshold values easily exceeded use mirroring of point at closest point in TIN triangle to compute deviation
d mirror d
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Segmentation based filtering
Note: the slides of this section were provided by George Sithole / George Vosselman based on their talk Filtering of airborne laser scanner data based on segmented point clouds given at the laser scanning workshop 2005 in Enschede
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Filter design
Problem analysis Smooth surface assumption does not hold Lack of context information Filter as a local operator Point-wise filtering
New filter approach Use continuous surface instead of smooth surface Filter continuous segments of points instead of points
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Segment based filtering
Texture based image segmentation
Point cloud segmentation into continuous surfaces
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Profile segmentation
Delaunay Delaunay Triangulation Triangulation
Minimum Minimum Spanning Spanning Tree Tree
Proximity Proximity Thresholding Thresholding
Remove Remove Dangling Dangling Edges Edges
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Profile classification
Raised Raised
Lowered Lowered
Terraced Terraced
High High
Low Low
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Combining profiles to segments
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Combining profiles to segments
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Segment classification
Based on majority of segment profile classifications
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Bridge detection
Select all terrain profiles Analyse profile segment classifications
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Results in urban area
Segment based filtering
Type I error Type II error
Alg. 1 Alg. 2 Three other algorithms of the ISPRS filter test
Alg. 3
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Results in quarry
Segment based filtering
Type I error Type II error
Alg. 1
Alg. 2
Alg. 3
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Quantitative results
Urban sites (error %) Alg 1 Average 5.6 Median 4.3
Alg 2 7.0 6.7
Alg 3 14.0 12.2
New alg 6.0 4.3
Rural sites (error %) Alg 1 Average 3.6 Median 2.9
Alg 2 9.5 7.9
Alg 3 15.6 17.2
New alg 5.4 6.2
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Conclusions for segment based filtering Segment-based filtering preserves discontinuities allows filtering of large objects can be combined with other filtering methods could be extended with other attributes (shape, size, colour) Segmentation in areas with low vegetation remains difficult Bridges can be recognised in bare earth segment Segmentation results may support manual editing
Claus Brenner Slide provided by George Sithole, George Vosselman International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
ISPRS filter test
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
ISPRS filter test
Comparison of filter algorithms, 2002-2004 8 sites, 8 participants Qualitative and quantitative evaluation
All filters do well on smooth terrain with vegetation and buildings. All filters have problems with rough terrain and complex city landscapes. In general, filters that compare points to locally estimated surfaces performed best. The problems caused by the scene complexities were larger than those caused by the reduced point density. Research on segmentation, quality assessment and usage of additional knowledge sources is recommended. Full report on http://www.geo.tudelft.nl/frs/isprs/filtertest/
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Extraction and modelling
Claus Brenner with contributions from George Vosselman and Juha Hyypp
Institute of Cartography and Geoinformatics University of Hannover, Appelstr. 9a, 30167 Hannover, Germany claus.brenner@ikg.uni-hannover.de www.ikg.uni-hannover.de
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example laser scan data
100
80
60
40
20
0 0 20 40 60 80 100
Data obtained by aerial laser scanning Example: approx. one measurement per m2 Regularized raster, mesh width 1m x 1m
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example laser scan data
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Main applications
Derivation of DEMs Forest inventory Extraction of man-made objects Flood modelling Mapping of linear structures: dikes, roads, power line clearance Classification
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Extraction and modelling
Introduction Feature extraction Derivatives Local polynomial fit and curvature analysis Planar faces Region growing, scan line grouping, RANSAC, Hough transform More complex shapes see terrestrial scanning Building extraction Examples (data driven, model driven, integration of existing knowledge) Future developments: constraints & generalization
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Derivatives
f ( x)
DSM seen as a grayvalue image derivatives can be used to detect jumps in the DSM second derivatives may be used to detect discontinuities in slope Derivative masks from digital image processing can be used Note: derivative has metric interpretation
x
f ( x) x
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Derivatives: discrete operators
Derivative operator based on difference quotient
df f ( x + x ) f ( x ) ( x) dx x
mask: (1 1) even mask length, linear phase noise: = 2 f 1.4 f Derivative operator based on average difference quotient
df 1 f ( x ) f ( x x ) f ( x + x ) f ( x ) f ( x + x ) f ( x x ) ( x) + = dx 2 x x 2 x
mask: 1 2 (1 0 1) = 1 2 (1 1) (1 1) odd mask length, zero phase noise: = 1 f 0.7 f
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Derivatives
Original DSM f ( x, y )
2 2 f ( x, y ) + f ( x, y ) x y
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Derivatives
Original DSM f ( x, y )
2 2 f ( x, y ) + f ( x, y ) x y
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Morphological operations: opening
300
300
250
250
200
200
150
150
100
100
50
50
0 0 50 100 150 200 250 300
0 0 50 100 150 200 250 300
Original DSM
DSM DTM
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Morphological operations: opening
DSM DTM Height > 5 m and footprint > 50 m2 Height > 5 m
Orthophoto
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Derivatives (especially second derivatives) are sensitive to noise Standard smoothing masks are not motivated geometrically Idea: for each discrete point, determine locally a best approximating polynomial (u ) function f then, derivatives f ( x) and f ( x) can be obtained from the derivatives (u ) and f (u ) of f
(u ) f
f (1)
u
M K
0 1K M
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
U = { M , M + 1,K 0,1,K , M }
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Scalar product
f , g := f (u ) g (u )
uU
Polynomial base functions up to second order
0 (u ) := 1 1 (u ) := u 2 (u ) := u 2
M ( M + 1) 3
Properties of base functions (orthogonality)
i , j = 0 i j 0 , 0 = 2 M + 1 =: p0 1 , 1 = 1 3 M ( M + 1)(2M + 1) =: p1 2 , 2 = K =: p2
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Definition of normalized base functions
bi :=
pi
i , b j = ij
(Kronecker)
Second order approximation for functions of one variable
(u ) = a (u ) f i i
i =0 uU
with
trick: no need to invert since functions are orthogonal
ai := f , bi = f (u ) bi (u )
Second order approximation for functions in two variables
(u , v) = f aij :=
i + j 2
ij
i (u ) j (v)
with
( u , v )U 2
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
f (u , v) bi (u ) b j (v)
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Derivatives:
(u, v) = a f 00 + a10u + a01v M ( M + 1) 2 M ( M + 1) + a20 u 2 + + a uv a 02 v 11 3 3
u v
(u , v) f (u, v) f
= a10 + a20 2u + a11 v = a01 + a02 2v + a11 u
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
f (0, 0) u f (0, 0) v 2 f (u, v) 2 u 2 f (u , v) u v 2 f (u , v) v 2
= a10 = a01 = 2a20 = a11 = 2a02
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Example:
M = 3 U = {3,K ,3} , p0 = 7, p1 = 28, p2 = 84
1 f u 1 ( ) 7 u =3 3 1 a1 = f , b1 = f (u ) u 28 u =3 a0 = f , b0 = a2 = f , b2 =
u =3
f (u )
1 2 (u 4) 84
From this, the following convolution masks are obtained:
1 (1 1 1 1 1 1 1) 7 1 d1 = ( 3 2 1 0 1 2 3 ) 28 1 d2 = ( 5 0 3 4 3 0 5 ) 84 d0 =
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Local estimation of polynomial functions
Two-dimensional convolution masks are obtained as follows:
T Du = d 0 d1 T Duu = 2d 0 d2 T Dvv = 2d 2 d0
Dv = d1T d 0
Duv = d1T d1
E.g. the second partial derivative with respect to u:
5 5 5 2 2 T * , 2 5 f D f D d d = = uu uu 0 2 2 7 84 u 5 5 5
0 3 4 3 0 5 0 3 4 3 0 5 0 3 4 3 0 5 0 3 4 3 0 5 0 3 4 3 0 5 0 3 4 3 0 5 0 3 4 3 0 5
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Differential geometry
x v
U
p q
2 3
Regular parametrized surface:
x : 2 U 3 U open, x differentiable, dxq injective
Normal vector
N (q) = xu xv (q) xu xv
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Differential geometry First fundamental form in local coordinates
I = E (u ) 2 + 2 F u v + G (v) 2 E = xu , xu , F = xu , xv , G = xv , xv
Second fundamental form in local coordinates
II = e (u ) 2 + 2 f u v + g (v) 2 e = N , xuu , f = N , xuv , g = N , xvv
Gaussian curvature and mean curvature
N (q) =
xu xv (q) xu xv
eg f 2 K = 1 2 = EG F 2 1 eG 2 fF + gE H = ( 1 + 2 ) = 2 EG F 2
1 , 2 main curvatures
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Differential geometry
DSM is given as a graph z = f(u,v) From this, the following simplifications are obtained:
z = f (u , v) u 1 0 , x = 0 , x = 1 x(u , v) = v u v f (u , v) fu fv E = xu , xu = 1 + f u2 etc. fu 1 f N= 2 v ( fu + f v2 + 1)1 2 1 f e = N , xuu = 2 uu ( fu + f v2 + 1)1 2 K, H
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
etc.
Commission VI Special Interest Group Technology Transfer Caravan
Surface types
Surfaces can be classified depending on the sign of K and H Both signs can be coded into a single number (KH sign map)
khs := 3 (1 + sgn H ) + 1 + sgn K
In practice, H=0 or K=0 will not be obtained, thus the following modified sign function is used:
1 x < sgn ( x) := 0 x 1 x >
sgn ( x)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Surface types
khs K<0 K=0 K>0
H<0 0 H=0 3 H>0 6 7 8 4 1 Not possible 2
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Application: curvature type classification
Type 03
Simple discrete derivative operators
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Type 68
Commission VI Special Interest Group Technology Transfer Caravan
Application: curvature type classification
Type 03
Local estimation of polynomial functions
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Type 68
Commission VI Special Interest Group Technology Transfer Caravan
Region based segmentation
Region based segmentation: partitioning of a region into disjoint subregions subregions evaluate true with respect to a given predicate P () subregions are maximal More precisely:
1.
UR
i =1
=R
2. 1 i n : Ri is connected 3. i j : Ri R j = 4. P ( Ri ) = true 5. i j : P ( Ri R j ) = false, if Ri , R j are neighbors
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Region based segmentation
1 5 9
2 6
3 7
4 8
1 5 9
2 6
3 7
4 8
R1 = {1, 2,3, 4, 7,8,12} R2 = {5, 6,10,11,15,16} R3 = {9,13,14}
10 11 12
10 11 12
13 14 15 16
13 14 15 16
How can the desired subregions be obtained? E.g.: cluster analysis split-and-merge region growing
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Region growing
Start
1 2 6 3 7 4 8 1 5 9 2 6 3 7 4 8 1 5 9 2 6 3 7 4 8
Search for seed region Found? Y Grow region as long as possible N End
5 9
10 11 12
10 11 12
10 11 12
13 14 15 16
13 14 15 16
13 14 15 16
1 5 9
2 6
3 7
4 8
1 5 9
2 6
3 7
4 8
1 5 9
2 6
3 7
4 8
10 11 12
10 11 12
10 11 12
13 14 15 16
13 14 15 16
13 14 15 16
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Region growing
Predicates for digital surface models distance of points from an estimated plane
P : z = ax + by + c distance: d (i ) = axi + byi + c zi
normal vector orientation
cos = N i , ( a, b,1)
T
Disadvantages: the order of selection of seed regions affects the result iterative estimation of plane equation is time consuming Application: detection of planar regions in DSM, e.g. roof faces
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Region growing: examples
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping (Jiang & Bunke, 1992) Subdivide each line into segments (e.g. using DouglasPeucker) Build seed region using consecutive segments Grow seed region by adding segments Postprocess
y0+2 y0+1 y0
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping (Jiang & Bunke, 1992) Subdivide each line into segments (e.g. using DouglasPeucker) Build seed region using consecutive segments Grow seed region by adding segments Postprocess
y0+2 y0+1 y0
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping (Jiang & Bunke, 1992) Subdivide each line into segments (e.g. using DouglasPeucker) Build seed region using consecutive segments Grow seed region by adding segments Postprocess
y0+3 y0+2 y0+1 y0
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping (Jiang & Bunke, 1992) Subdivide each line into segments (e.g. using DouglasPeucker) Build seed region using consecutive segments Grow seed region by adding segments Postprocess
y0+3 y0+2 y0+1 y0
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping segmentation: examples
DSM (Stuttgart, 1m)
Segmentation
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Scanline grouping segmentation: examples
DSM (Stuttgart, 1m)
Segmentation
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
RANSAC (Random Sample Consensus, Fischler & Bolles 1981)
Algorithm: Select minimum number of observations randomly (e.g. 3 points for a plane, 2 points for a line) = random sample Compute parameters based on these observations Find out the number N of compatible observations = consensus Select solution which has largest N
There is a formula for minimum number of draws required Very powerful algorithm, easy to implement
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
RANSAC example: find linear segments
z
x z
x z
x
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
RANSAC example: find linear segments
z
x z
x z
x
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
RANSAC for planar segmentation
etc.
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Examples: region growing, RANSAC
Region growing
RANSAC
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Examples: region growing, RANSAC
RANSAC
Region growing
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Hough transform (PVC Hough, 1962)
6
(x0,y0)
cos N = sin
c
4 2
one specific line
1 2 3 4 5 6
x cos + y sin + c = 0
c = ( x0 cos + y0 sin ) = c( )
x
-2 -4
Hough space
-6
high count
4 2
1 -2 -4
x
-6
accumulator
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Hough transform
Can be used for any parameterized object: planes, cylinders, Higher dimensions may become impractical (space, time) Sometimes sequential Hough transforms of lower dimension are feasible Global 3D Hough transform may be problematic
(source: George Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Building Reconstruction
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
(Source: Sony press release)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Non photorealistic rendering (NPR)
Source: Prof. Dllner, Computer Graphics Systems, Hasso-Plattner Institute, Potsdam
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Augmented reality car navigation
Source: press release, Siemens AG, 30.09.2005
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Engravings by Merian
Matthus Merian d. ., 1593-1650 Martin Zeiller Topographia, 1642ff., 30 Bd., 100 maps, 2150 views
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Partial tasks for building reconstruction
Raw data Result
building reconstruction
Detection
Structuring
Geometric Reconstruction
Semantic Attributation
Gebude {{ Gebude ID == 541 ID 541 Nutzungsart == Gewerblich Nutzungsart Gewerblich Gebude { Gebude { Stockwerke ==55 Stockwerke ID == 541 ID 541 Stellpltze == 22 Stellpltze Nutzungsart = Gewerblich Nutzungsart = Gewerblich Fassadenmaterial == {{ Gebude { Fassadenmaterial Gebude { Stockwerke ==55 Stockwerke F1 == KH315 ID == 541 F1 KH315 ID 541 Stellpltze == 22 Stellpltze F2 == KH221 Nutzungsart == Gewerblich F2 KH221 Nutzungsart Gewerblich Fassadenmaterial == {{ Fassadenmaterial F3 = KH315 Stockwerke ==55F3 = KH315 Stockwerke F1 == KH315 F1 KH315 F4 == EF951 Stellpltze == 22 F4 EF951 Stellpltze F2 == KH221 F2 } } KH221 Fassadenmaterial == {{ Fassadenmaterial F3 == KH315 F3 KH315 = { ffentlich F1 = KH315 ffentlich ={ F1 = KH315 F4 == EF951 F4 EF951 { {Artztpraxis, Link @3398472 } F2 = KH221 F2 } = KH221 Artztpraxis, Link @3398472 } } { Restaurant, Link @0274832 }} F3 == KH315 Restaurant, Link @0274832 F3 KH315 {= ffentlich {{ ffentlich = }} F4 == EF951 F4 EF951 { {Artztpraxis, Link @3398472 }} Link @3398472 } Artztpraxis, }} } {{ Restaurant, Link @0274832 } Restaurant, Gebude { { Link @0274832 } ffentlich = {{ ffentlich = } } Gebude ID = 542 { {Artztpraxis, Link @3398472 }} ID = 542 Link @3398472 } Artztpraxis, } Nutzungsart == Wohn {{ Restaurant, Link @0274832 }} Nutzungsart Wohn Restaurant, Link @0274832 Gebude { Gebude { Stockwerke ==22 }} Stockwerke ID = 542 ID = 542 Stellpltze == 00 }} Stellpltze Nutzungsart = Wohn Nutzungsart = Wohn } Gebude { Gebude { } Stockwerke ==22 Stockwerke ID == 542 ID 542 Stellpltze == 00 Stellpltze Nutzungsart == Wohn Nutzungsart Wohn }} Stockwerke ==22 Stockwerke Stellpltze == 00 Stellpltze }}
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Geometric building models
Building Model
Parametric
General
Primitive
Combined
Prismatic
Polyhedral
Ruled
Freeform
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Boundary representation vs. CSG
Topology hard
easy
Boundary representation (BREP)
Constructive solid geometry (CSG) Claus Brenner
International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Data driven reconstruction
Object contains straight edges Object contains rectangles Object is red
Original image Edge extraction Grouping into rectangles Filtering using spectral signature
Object has minimum size
Filtering using size, grouping
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Model driven reconstruction
Model database Original image
Explicit models
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example: data driven
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Data driven approach Assumptions: Roof described by planar faces Height jump edges parallel or perpendicular to main building orientation
Steps: Plane detection Initial face outlining in TIN Reconstruction of building outline Reconstruction of roof face edges
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Initial roof faces
Height data Connected components
Rough face outlines
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction of roof outline
Union of faces
Approximation by straight lines main building direction minimum edge size most points inside building
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction of face edges
Ridges and valleys Intersection of planes of adjacent roof faces Roof outline Intersection of planes with adjacent walls Height jumps inside roof surface Straight lines aligned to main building directions
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction of 3D building Merging edges to faces Joining parallel edges Intersection of other edges Extraction of terrain height
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example: model driven
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Demo: ATOP
Claus Brenner Can be downloaded from: http://www.ikg.uni-hannover.de/3d-citymodels International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Integration of existing knowledge: Using existing 2D ground plans
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Using existing 2D ground plans
Solves detection problem Helps with structuring
Helps to select model in model driven approach (How?)
Helps with geometric reconstruction
Boundaries, orientations
Problems:
Inaccurate maps Outdated maps Reconstruction of structures for which no hint appears in the ground plan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Idea 1: Canonical reconstruction of roof based on ground plan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Roof construction
split event
Medial axis
Straight skeleton (canonical roof)
edge event
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction based on canonical roof Build roof from straight skeleton, assuming equal slopes Project into plane (= hypothesise) Test for evidence using DSM (= test) Set planes for with no evidence upright Build skeleton again, using new slopes Fit to DSM strong dependency on ground plan, limited roof shapes 1997
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Different roofs raised on the same ground plan & same planes
(canonical roof)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Idea 2: Subdivide ground plan into primitives
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Subdivision into primitives
4 2
3 1
3 4 2 1
3 4 2 4 2 1
Flat
Desk
Ridge
Hipped
Ground plan subdivision, selection of 3D-primitive, parameter estimation more complex roofs, but still strong dependency on ground plan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example results
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Idea 3: Subdivide ground plan at concave vertices (Vosselman)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Decomposition of ground plans
Ground plan
Decompositions
Building primitives on partitions
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Combining maps with laser data
Processing steps: Detection of planar faces Initial 3D model (Model refinement)
Ground plan refinement Roof face reconstruction
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Detection of planar faces
3D Hough transform in each ground plan segment Growing and merging of initial planar faces
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Refinement of ground plan segmentation
One plane per segment Detection of intersection lines Detection of height jump lines Constrained to segment orientation Not near segment edge
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction of roof face outlines
Best fitting plane per segment Merging of segments of same plane
(Slide provided by George Vosselman) Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Analysis
Starts from ground plan Ability to subdivide segments by planar segmentation (3D Hough transform) Ability to merge segments of the same plane less dependency on ground plan, stronger role of DSM
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Idea 4: Relate planar patches to ground plan using a grammar
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Determination of relevant regions
What criteria can be used? General criteria (Size, shape) Hints from ground plan
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Labelling of regions
Ground plan
c compatible l left r right p previous n next a opp. previous b opp. next
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example for labels
{ r,n,a } {c}
{ l,p,b }
{c} { l,p,b } {c} { r,n,a } {c} {c} { l,p,b } { r,n,a } {c}
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Acceptance rules
Contained pattern <p+a+c+ c+b+n+> <p+ * n+> l+r+
Accepted pattern <p+a+ b+n+> <p+ and n+> l+r+
All remaining c+ are accepted
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example
Aerial image
All regions of segmentation
Accepted regions
Roof built from accepted regions
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
EuroSDR test on building extraction
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Test Sites Senaatti Hermanni Espoonlahti Amiens
Senaatti
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Espoonlahti
Hermanni
Commission VI Special Interest Group Technology Transfer Caravan
Hermanni, position accuracy
point deviations in plane IQRs of point deviations
0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
IG N la se r+ ae ri a l IC C la N eb se r el +P ar tn er Aa lb or g +B Te ch ni k D re sd en FO Io ut li n es i ty St ut tg ar t yb er C D el ft FO I
CyberCity
Stuttgart
IGN
2m 0m -2 m
ICC laser+aerial Nebel+Partner C+B Technik
IQR Height IQR North IQR East
ICC laser
1 out
Aalborg
FOI outlines
Delft
Dresden
FOI
1 out
Aerial images, low autom.... Laser data, high autom.
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
IC C
(Slide provided by Juha Hyypp)
Commission VI Special Interest Group Technology Transfer Caravan
Some Conclusions
Cybercity can be considered as a reference to others in terms of quality and detailness Fully automatic laser scanning gives 4 times higher errors than CC, but time spent is 5%, depends on pulse density, building size. Errors of laser-based results can be explained by non accurate determination of building outlines Laser good at height and roof inclination determination Aerial images good at building outline determination Integration of laser and aerial imagery optimal, techniques relative simple at this moment Some more complex laser models extremely good in quality Laser pulse density major factor to explain differences between test sites (within laser based models) Level of automation is a key factor to explain the difference of results.
Slide provided by Juha Hyypp Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Future developments
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Reconstruction Aspects Topological correctness Faces are correctly joined, no holes Geometric constraints Parallelism, rectangularity, surfaces having same slope, surfaces meeting in one point, Generalization Acquisition generalization: which objects / object parts are to be modeled LoD generalization: derive another model from a given one
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Geometric Constraints
CSG Primitives are constrained implicitly No implicit constraints across primitives Sometimes: "snap"
B-rep: Constraints have to be added explicitly
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Example constraint equations (2D)
ax + by + c = 0 a2 + b2 1 = 0 ax + by + c = 0
a1a2 + b1b2 = 0
( x1 x 2 ) 2 + ( y1 y 2 ) 2 d 2 = 0
ax + by + c = d
( x x0 ) 2 + ( y y 0 ) 2 r 2 = 0
a1b2 a 2 b1 = 0
Logic
a1a2 + b1b2 cos = 0 a1b2 a2b1 sin = 0
Metric
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Weak primitives
Fields External constraint equations
(xc,yc) h
Internal Constraint Equations
Points Lines
Two lines perpendicular
Internal representation
(x2,y2) (x3,y3) (x1,y1) (x0,y0)
Internal Constraint Equations
Points Lines
Point on line
Internal representation
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Weak primitives demonstrator
Claus Brenner Can be downloaded from: http://www.ikg.uni-hannover.de/3d-citymodels International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Containers
Form hierarchy Objects are primitives they contain geometry or Objects are containers they contain other containers or primitives Implement layout functionality Linear, grid, irregular Container: Grid layout New: induced by formal grammar
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Generalization
CSG
Implicit generalization
B-rep:
Region sizes? Rules?
Generalization during capture
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Level of Detail (Definition according to Sig3D)
LoD 0
Regional No roofs
Texture, ortho photo, land use
LoD 1
City / Site Flat roofs
Block model
LoD 2
City / Site Roof type & orientation
Textured model, differentiated roofs, vegetation (trees)
LoD 3
City / Site Real roof shape
Architectural model, vegetation, street furniture
LoD 4
Interior Real roof shape
Walkable architectural models
>5m / >5m Pos./Height
See http://www.citygml.org/
5m / 5m
2m / 1m
0,5m / 0,5m
0,2m / 0,2m
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
In 2D: elementary generalization operations
s n +1 s n -1 s n -2 sn s n +2
gi
Monika Sester, ikg
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Elementary generalization operations
ik i1 m P P n P i0 P ... P P g0 g1 g k 1
or
Generalization chain Maximum representation: P n P Minimum representation: P m Number of polygon edges: i0 = n
mn
ik = m
Elementary generalization operations: g j
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Elementary generalization operations
P P P g 1
m ik
k 1
i k 1
n P P 1 ... 1 g g i0
k 2 0
or
Inverse generalization chain Pre-computed Can be used for progressive transmission 1 j Each g j is associated with a parameter Parameters j are decreasing (inverse chain)
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Continuous generalization demo
Claus Brenner Can be downloaded from: http://www.ikg.uni-hannover.de/3d-citymodels International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Generalization in 3D?
Original
Cut
Fill
Final step
Frank Thiemann, ikg
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Generalization by incremental modelling
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Generalization by incremental modelling
+ +
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Conclusions
Methods available for the extraction of discontinuity and continuity Availability of 3D information makes relatively simple extraction processes possible Laser scanning good at heights and roof inclination Still no fully automatic extraction systems available
Problem: reliability Integration of ground plan information Automation will come in the form of small enhancements
New challenges
Interoperability requires rich descriptions Expression of relations (constraints) between objects Automatic generalization
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Literature
Wehr, A., Lohr, U. (1999): Airborne laser scanning an introduction and overview. ISPRSJ, Vol. 54, 68-82. Baltsavias, E. P. (1999a): Airborne laser scanning: basic relations and formulas. ISPRSJ, Vol. 54, 199-214. Baltsavias, E. P. (1999b): Airborne laser scanning: existing systems and firms and other resources. ISPRSJ, Vol. 54, 164-198. Hug, C., Ullrich, A., Grimm, A. (2004): Litemapper-5600 A waveform-Digitizing LIDAR Terrain and Vegetation Mapping System, Proc. ISPRS WG VIII/2, Freiburg, Germany, Oct. 3-6, 2004. IAPRS Vol. XXXVI, Part 8/W2. Vosselman, G. (2000): Slope based filtering of laser altimetry data, IAPRS Vol. 33 Part B3, 935-942. Kraus K., Pfeifer, N. (1998): Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS JPRS Vol. 53, 193-203. Pfeiffer, N., Stadler, P., Briese, Chr. (2001): Derivation of digital terrain models in the SCOP++ environment, Proc. OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Digital Elevation Models, Stockholm, March 1-3. Axelsson, P. (2000): DEM generation from laser scanner data using adaptive TIN models, IAPRS Vol. 33 Part B4, 110-117. Sithole, G., Vosselman, G. (2005): Filtering of airborne laser scanner data based on segmented point clouds. Proc. ISPRS Workshop Laser scanning 2005, Enschede, IAPRS Vol. 36 Part 3/W19, 66-71.
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
Commission VI Special Interest Group Technology Transfer Caravan
Cited web material
Riegl LMS (2005): LMS-Q560 Airborne laser scanner for full waveform analysis. Preliminary data sheet, 23.09.2005. www.riegl.co.at. Optech (2006): ALTM 3100EA brochure. www.optech.ca/prodaltm.htm. Riegl LMS (2006): http://www.riegl.co.at/airborne_scannerss/airborne_scanners_literature_/downloads/advantages_of_echo_digitizati on_and_full_waveform_analysis.pdf. Last accessed 22.03.06.
For manufacturer (and other) link lists, see http://www.commission3.isprs.org/wg3/
Claus Brenner International Summer School Digital Recording and 3D Modeling, Aghios Nikolaos, Crete, Greece, 24-29 April 2006
You might also like
- Crit PathDocument6 pagesCrit PathSanjay TiwariNo ratings yet
- German Universities CSDocument9 pagesGerman Universities CSqayxarNo ratings yet
- Leica ScanStation C5Document3 pagesLeica ScanStation C5bbutros_317684077No ratings yet
- Underground Pipe Stress Check - UGP 2: Design CalculationDocument9 pagesUnderground Pipe Stress Check - UGP 2: Design CalculationSana UllahNo ratings yet
- Silent Sound TechnologyDocument2 pagesSilent Sound TechnologybingwazzupNo ratings yet
- Pulsed Microwave TechnologyDocument2 pagesPulsed Microwave TechnologybingwazzupNo ratings yet
- Telepathy and The Technology of Mind ControlDocument18 pagesTelepathy and The Technology of Mind Controlbingwazzup100% (2)
- Apollo CommandsDocument10 pagesApollo CommandsJed GarciaNo ratings yet
- GPA CalculatorDocument10 pagesGPA CalculatorMuhammad RashidNo ratings yet
- Tile Hatch Creator3Document2 pagesTile Hatch Creator3Henrique Sesana PimentaNo ratings yet
- Retaining WallDocument32 pagesRetaining WallDhenz AdHi PoernamaNo ratings yet
- Gann Square of 9 CalculatorDocument3 pagesGann Square of 9 CalculatorSrinivasan SubramanianNo ratings yet
- Cost Estimate Sheet: TECO Industrial Park, Mabalacat, PampangaDocument5 pagesCost Estimate Sheet: TECO Industrial Park, Mabalacat, PampangaCivil Design EngineerNo ratings yet
- Design of Reinforced Concrete BeamsDocument16 pagesDesign of Reinforced Concrete Beamsabdul kareeNo ratings yet
- Seismic CalcDocument2 pagesSeismic CalcJhundel Factor PajarillagaNo ratings yet
- Foundation Design of Lamp PostDocument1 pageFoundation Design of Lamp PostMayank AgrawalNo ratings yet
- Foundation Engineering PITDocument24 pagesFoundation Engineering PITxyxyquazNo ratings yet
- Design of Base Plate in PH Rib FoundationDocument2 pagesDesign of Base Plate in PH Rib Foundationblisscutest beagleNo ratings yet
- Project:: Path: File:///var/www/apps/conversion/tmp/scratch - 1/354705375Document2 pagesProject:: Path: File:///var/www/apps/conversion/tmp/scratch - 1/354705375tkofaiNo ratings yet
- Axial Load Capacity For Deep Foundations Piles: Sand Input ResultsDocument8 pagesAxial Load Capacity For Deep Foundations Piles: Sand Input Resultsacidrisamuel2656No ratings yet
- Reaction SheetDocument2 pagesReaction SheetRakesh SharmaNo ratings yet
- Road ConcretingDocument58 pagesRoad ConcretingHerbee ZevlagNo ratings yet
- Xela Consult: Design Parameters Mar-05 Design Information Proposed Crown Towers DevelopmentDocument4 pagesXela Consult: Design Parameters Mar-05 Design Information Proposed Crown Towers DevelopmentAlexious DemideNo ratings yet
- Sesmic Load at Floor LevelDocument14 pagesSesmic Load at Floor LevelJennifer PearsonNo ratings yet
- Material C 25 Assuming For Shear Wall Material S 300Document12 pagesMaterial C 25 Assuming For Shear Wall Material S 300ephremNo ratings yet
- Structural SectionsDocument45 pagesStructural SectionsIgnatius SamrajNo ratings yet
- Expansion Tank Selection CalculatorDocument17 pagesExpansion Tank Selection Calculator185412No ratings yet
- Dyke Wall Expansion JointDocument2 pagesDyke Wall Expansion Jointruhul43No ratings yet
- Project CharterDocument27 pagesProject CharterAkhtar AnsariNo ratings yet
- OneSteel Reinforcing Area CalculatorDocument12 pagesOneSteel Reinforcing Area CalculatormingmingminglesNo ratings yet
- Spice Parameter CalculatorDocument14 pagesSpice Parameter Calculatorhamid_kh_56No ratings yet
- Concrete Slab DesignDocument3 pagesConcrete Slab DesignjowarNo ratings yet
- Design of Slab: Two WayDocument2 pagesDesign of Slab: Two WayTLSNo ratings yet
- BEAMCOL9Document10 pagesBEAMCOL9Richard FallegaNo ratings yet
- Mat FoundationDocument38 pagesMat FoundationLouisse May GeminaNo ratings yet
- Design of StairDocument7 pagesDesign of StairMainali IshuNo ratings yet
- Design of Stair As Per BS 8110: Input DataDocument2 pagesDesign of Stair As Per BS 8110: Input DataABITHANo ratings yet
- Tie Rod Tieback SystemsDocument12 pagesTie Rod Tieback SystemsVicces P. EstradaNo ratings yet
- Formulas SD354 A2Document31 pagesFormulas SD354 A2Liza StewartNo ratings yet
- Sarpanta LemnDocument4 pagesSarpanta LemnEla TeodorescuNo ratings yet
- Rust Build CalcDocument2 pagesRust Build CalcMihai AlexandruNo ratings yet
- SHEAR (Vertical Reaction) : SolutionDocument4 pagesSHEAR (Vertical Reaction) : SolutionxtianNo ratings yet
- Design of Staircase 1.DATADocument3 pagesDesign of Staircase 1.DATAAnonymous TADKvCnNo ratings yet
- RCC11 Element DesignDocument6 pagesRCC11 Element DesignCioabla BogdanNo ratings yet
- Sheet1: B D Cover Dia of Bar MuDocument8 pagesSheet1: B D Cover Dia of Bar MuVenkateshNo ratings yet
- Corbel DesignDocument2 pagesCorbel DesignFrederick TanNo ratings yet
- Catalogue 02 02Document26 pagesCatalogue 02 02Alejandro GilNo ratings yet
- Type 1 New Jersey' Style Median Barrier: Product No: 7-0070Document17 pagesType 1 New Jersey' Style Median Barrier: Product No: 7-0070EiflaRamosStaRitaNo ratings yet
- Ex MathcadDocument8 pagesEx MathcadRija HossainNo ratings yet
- Controlling Forces Wind FactorDocument3 pagesControlling Forces Wind FactorRajib MaharjanNo ratings yet
- Portal Design Moments: W (KN/M) B CDocument1 pagePortal Design Moments: W (KN/M) B CSharyn PolleyNo ratings yet
- I BeamDocument1 pageI Beamasmerom2011No ratings yet
- 148841505-Verificare-StalpDocument50 pages148841505-Verificare-StalpkrmeenNo ratings yet
- Design of RCC Column: DataDocument3 pagesDesign of RCC Column: DataamokeNo ratings yet
- Beam DesignDocument2 pagesBeam DesignAnonymous FxmcZ1KxEXNo ratings yet
- Argus Antenna CPX410RDocument1 pageArgus Antenna CPX410RYuma M DasukiNo ratings yet
- Squeeze CementDocument1 pageSqueeze CementscrbdgharaviNo ratings yet
- Compresiune Excentrica - Cazul 1Document11 pagesCompresiune Excentrica - Cazul 1Puiu Ioan DanielNo ratings yet
- Cap.8 - Calculul Si Armarea ScarilorDocument2 pagesCap.8 - Calculul Si Armarea ScarilorStefania OlareanuNo ratings yet
- 3pile PilecapDocument4 pages3pile Pilecapsivaraju1100% (1)
- Earth Pressure CalcDocument3 pagesEarth Pressure Calcsuman_civilNo ratings yet
- ASCE710IDocument15 pagesASCE710IMina MagdyNo ratings yet
- An UWB Through-The-Wall Radar With 3D ImagingDocument4 pagesAn UWB Through-The-Wall Radar With 3D ImagingMarc SchortgenNo ratings yet
- Refection of National Geodetic Infrastructure Using Gnss TechniqueDocument43 pagesRefection of National Geodetic Infrastructure Using Gnss TechniqueMohamed Chakib SAFAR BATINo ratings yet
- Csat 11Document52 pagesCsat 11Mossad NewsNo ratings yet
- Ip Multicast Part1Document18 pagesIp Multicast Part1Pallab PalNo ratings yet
- Implementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPDocument26 pagesImplementing A Digital Tracker For Monopulse Radar Using The TMS320C40 DSPbingwazzupNo ratings yet
- Ultrasonic Interrogating System and Exciter-Detector Circuit ThereforDocument12 pagesUltrasonic Interrogating System and Exciter-Detector Circuit ThereforbingwazzupNo ratings yet
- DEW Electromagnetic SpectrumDocument3 pagesDEW Electromagnetic SpectrumbingwazzupNo ratings yet
- Directed Energy WeaponsDocument368 pagesDirected Energy WeaponsPete Santilli100% (1)
- The Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteeDocument14 pagesThe Use of RFID For Human Identification A DRAFT REPORT From DHS Emerging Applications and Technology SubcommitteespectabearNo ratings yet
- The Invisible Third World War by W. H. Bowart and Richard SuttonDocument35 pagesThe Invisible Third World War by W. H. Bowart and Richard Suttonhisroyalslynessone2funkNo ratings yet
- Apparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsDocument18 pagesApparatus and Methods Using Acoustic Telemetry For Intrabody CommunicationsbingwazzupNo ratings yet
- Random Noise Monopulse Radar System For Covert Tracking of TargetsDocument10 pagesRandom Noise Monopulse Radar System For Covert Tracking of TargetsbingwazzupNo ratings yet
- The Radio Armateur Microwave Communications HandbookDocument192 pagesThe Radio Armateur Microwave Communications HandbookRapee Dev100% (1)
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- Radio Direction FinderDocument78 pagesRadio Direction Finderbingwazzup100% (1)
- An Overview of Acoustic TelemetryDocument11 pagesAn Overview of Acoustic TelemetrybingwazzupNo ratings yet
- Model of A Monopulse Radar Tracking System For Student LaboratoryDocument6 pagesModel of A Monopulse Radar Tracking System For Student Laboratorybingwazzup100% (1)
- An Investigation On The Physiological and Psychological Effects of Infrasound On PersonsDocument6 pagesAn Investigation On The Physiological and Psychological Effects of Infrasound On Personsbingwazzup100% (1)
- Biological AmplificationDocument2 pagesBiological AmplificationbingwazzupNo ratings yet
- Infra SoundDocument7 pagesInfra Soundbingwazzup100% (1)
- Cloning The EmotionsDocument2 pagesCloning The Emotionsbingwazzup100% (1)
- Electromagnetic Weapons TimelineDocument6 pagesElectromagnetic Weapons Timelinebingwazzup100% (1)
- Most Common Known Electronic Low FrequencyDocument4 pagesMost Common Known Electronic Low Frequencybingwazzup100% (1)
- NI-Tutorial-14516-En - Noise Analysis in MultisimDocument10 pagesNI-Tutorial-14516-En - Noise Analysis in Multisimwert1a2No ratings yet
- Social Change - Refers To An Alteration in The Social Order of A Society. It May Include Changes in NatureDocument2 pagesSocial Change - Refers To An Alteration in The Social Order of A Society. It May Include Changes in NatureLee-Ann LimNo ratings yet
- FIN9 Shrimp Prawns - International TradeDocument82 pagesFIN9 Shrimp Prawns - International TradeAnn Camille JoaquinNo ratings yet
- Gmail - Order Confirmation Email For Metrobank Math Challenge 2020 - Form 1Document2 pagesGmail - Order Confirmation Email For Metrobank Math Challenge 2020 - Form 1Jayson TV100% (1)
- Spontaneity: Decrease in The Enthalpy A Criterion For Spontaneity ?Document11 pagesSpontaneity: Decrease in The Enthalpy A Criterion For Spontaneity ?Prakhar GuptaNo ratings yet
- XJ700N NC 1985Document64 pagesXJ700N NC 1985jcgiovatto1No ratings yet
- Bidding Document Banking Reconciliation System - 0Document9 pagesBidding Document Banking Reconciliation System - 0Usman AmjadNo ratings yet
- Fedex Ratesheets: Proposal No.: 9819742 1 / 11Document11 pagesFedex Ratesheets: Proposal No.: 9819742 1 / 11nanananacmonNo ratings yet
- SEDA (Application Form) Manual 425kWp Up To 1MW - 140514Document13 pagesSEDA (Application Form) Manual 425kWp Up To 1MW - 140514raghuram86No ratings yet
- Basic Paragraph Format: Parts of A ParagraphDocument6 pagesBasic Paragraph Format: Parts of A ParagraphfarishaNo ratings yet
- Unit 8 Article Review SubmitDocument4 pagesUnit 8 Article Review SubmitVirginia TownzenNo ratings yet
- Project Report On Marketing Strategies of HP in India Mayank ThakurDocument16 pagesProject Report On Marketing Strategies of HP in India Mayank Thakurradhay mahajanNo ratings yet
- The Diocese of Bacolod v. Commission On Elections, G.R. No. 205728, January 21, 2015 Separate Concurring Opinion, Carpio J.Document6 pagesThe Diocese of Bacolod v. Commission On Elections, G.R. No. 205728, January 21, 2015 Separate Concurring Opinion, Carpio J.Justice Antonio T. CarpioNo ratings yet
- Online Vs in Person School Final Essay 1Document3 pagesOnline Vs in Person School Final Essay 1api-520481368No ratings yet
- Global Supply Chain ManagementDocument24 pagesGlobal Supply Chain ManagementThanh Phương NguyễnNo ratings yet
- 1 TransformerDocument3 pages1 TransformerSyed Noman AhmedNo ratings yet
- Fee Management SystemDocument44 pagesFee Management SystemSangeetha G67% (3)
- HydroststicsDocument35 pagesHydroststicstirupatiNo ratings yet
- Filipino Creativity and Contributions To The World: By: Xandra RuamDocument13 pagesFilipino Creativity and Contributions To The World: By: Xandra RuamXandra PaulineNo ratings yet
- Music B2Document13 pagesMusic B2angelitzhkNo ratings yet
- Thesis RsDocument22 pagesThesis RsS WaghNo ratings yet
- Yoga Teachings - Sun Salutation / Surya NamaskarDocument3 pagesYoga Teachings - Sun Salutation / Surya NamaskarGurudevi, Satguru Shri MahashaktianandaNo ratings yet
- Starting Downloads With IDMDocument2 pagesStarting Downloads With IDMAnonymous JZFSB3D0% (1)
- 1ST SUMMATIVE TEST FOR G10finalDocument2 pages1ST SUMMATIVE TEST FOR G10finalcherish austriaNo ratings yet
- Developing Servo Indexing System Using Timing Screw For Automatic Liquid Filler in Manufacturing EnvironmentDocument17 pagesDeveloping Servo Indexing System Using Timing Screw For Automatic Liquid Filler in Manufacturing EnvironmentLoc HuynhNo ratings yet
- Finman Answer TypeDocument8 pagesFinman Answer TypequeeneNo ratings yet
- Engine Equipment TableDocument2 pagesEngine Equipment TableFandy MaulanNo ratings yet
- Water Balance - Mar23pdfDocument1 pageWater Balance - Mar23pdfSetiawan HatmajiNo ratings yet
- % Chapter 2: Human Responsibilities For The EnvironmentDocument33 pages% Chapter 2: Human Responsibilities For The EnvironmentK CNo ratings yet