You might also like
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Major Parts of Color TVDocument9 pagesMajor Parts of Color TVmark david sabellaNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Cuk Converter State SpaceDocument5 pagesCuk Converter State SpaceEdu Daryl MacerenNo ratings yet
- Cooling Water SystemDocument3 pagesCooling Water SystemJamil AhmedNo ratings yet
- TUTORIAL COSIMIR - Es.en PDFDocument53 pagesTUTORIAL COSIMIR - Es.en PDFasdasdaNo ratings yet
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDocument7 pagesA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALNo ratings yet
- MTU Gendrive S4000 NOMENCLATURE PDFDocument9 pagesMTU Gendrive S4000 NOMENCLATURE PDFmohsen_cumminsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Oregon WMR300 PDFDocument15 pagesOregon WMR300 PDFsibo100% (1)
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNo ratings yet
- Sliding Mode Control For Stabilizing DC-link of DC-DC Converter in Photovoltaic SystemsDocument5 pagesSliding Mode Control For Stabilizing DC-link of DC-DC Converter in Photovoltaic SystemsAnonymous A3NZoENo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Chattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlDocument6 pagesChattering Phenomenon Supression of Buck Boost DC-DC Converter With Fuzzy Sliding Modes ControlVenkata SubramanianNo ratings yet
- A Feedback Linearization Based Control Strategy For VSC-HVDC Transmission ConvertersDocument10 pagesA Feedback Linearization Based Control Strategy For VSC-HVDC Transmission ConvertersĐỗ TrườngNo ratings yet
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 pagesA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşNo ratings yet
- Slidig Mode in Buck PDFDocument6 pagesSlidig Mode in Buck PDFAmar SajiNo ratings yet
- Ram6n: Sliding Mode Controller For The Boost InverterDocument6 pagesRam6n: Sliding Mode Controller For The Boost InverterskrtamilNo ratings yet
- Presentation Paper On DGDocument5 pagesPresentation Paper On DGAlok Bikash SadangiNo ratings yet
- Multiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachDocument6 pagesMultiple Controllers For Boost Converters Under Large Load Range: A GA and Fuzzy Logic Based ApproachDaltonVidorNo ratings yet
- Adaptive Sliding Mode Control Method For DC-DC ConvertersDocument10 pagesAdaptive Sliding Mode Control Method For DC-DC ConvertersTran Cuong HungNo ratings yet
- Slide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelDocument6 pagesSlide Mode Control Current Mode Control in DC-DC Converters: Cristina MorelJaramillo Rojas IsaacNo ratings yet
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Document6 pagesApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDocument7 pagesDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniNo ratings yet
- Master-Slave Sliding-Mode Control Design in Parallel-Connected InvertersDocument8 pagesMaster-Slave Sliding-Mode Control Design in Parallel-Connected Invertersvirus101No ratings yet
- Optimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EduDocument6 pagesOptimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EdursrtnjNo ratings yet
- Buck BoostDocument6 pagesBuck BoostAngel MarianoNo ratings yet
- Design of Fuzzy Sliding Mode Control For DC-DC ConverterDocument6 pagesDesign of Fuzzy Sliding Mode Control For DC-DC ConverterXime Mendez FloresNo ratings yet
- Epe 2010Document7 pagesEpe 2010Meral AltinayNo ratings yet
- Slidin Mode Research PaperDocument33 pagesSlidin Mode Research PaperAnimesh JainNo ratings yet
- Non-Linear Controller Applied To Boost DC-DC ConvertersDocument8 pagesNon-Linear Controller Applied To Boost DC-DC ConvertersC_hakan_CNo ratings yet
- Computer Science Textbook Solutions - 32Document7 pagesComputer Science Textbook Solutions - 32acc-expertNo ratings yet
- Robust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power SystemDocument9 pagesRobust Iterative PID Controller Based On Linear Matrix Inequality For A Sample Power Systemsjo05No ratings yet
- Researches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsDocument4 pagesResearches Regarding Functional Stabilization of Electro-Hydraulic Servo-SystemsMaria Gabriela BusteloNo ratings yet
- Discrete Time Synergetic Control For DC-DC Converter: N M N×N N×MDocument6 pagesDiscrete Time Synergetic Control For DC-DC Converter: N M N×N N×MAnonymous KhhapQJVYtNo ratings yet
- Wind Energy Research PaperDocument4 pagesWind Energy Research PaperKumail Hasan NaqviNo ratings yet
- An Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemDocument8 pagesAn Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemG. ANo ratings yet
- Designing SMC Boost Converter For DVR Using VSI To Mitigate Voltage Disturbances and HarmonicsDocument6 pagesDesigning SMC Boost Converter For DVR Using VSI To Mitigate Voltage Disturbances and Harmonicssri261eeeNo ratings yet
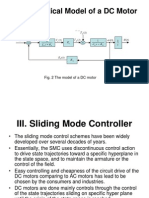
- Fig. 2 The Model of A DC MotorDocument10 pagesFig. 2 The Model of A DC MotorFatih SalihovicNo ratings yet
- A Double Input DC/DC Converter For Photovoltaic/Wind SystemsDocument5 pagesA Double Input DC/DC Converter For Photovoltaic/Wind SystemswidepermitNo ratings yet
- Unit 7 and 8Document32 pagesUnit 7 and 8Alton S H ChenNo ratings yet
- An Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangDocument5 pagesAn Adaptive Fuzzy Pid Control of Hydro-Turbine Governor: Xiao-Ying Zhang, Ming-Guang ZhangPadmo PadmundonoNo ratings yet
- TCSC Damp SadikovicDocument14 pagesTCSC Damp SadikovicsathyakalyanNo ratings yet
- High Performance DCDC Buck Converter Using SlidingDocument9 pagesHigh Performance DCDC Buck Converter Using SlidingArivalakan Joyal2002No ratings yet
- Annamalai PaperDocument9 pagesAnnamalai PaperPrabu BaskaranNo ratings yet
- Voltage-Oriented Vector Control of Induction Motor-Principle andDocument10 pagesVoltage-Oriented Vector Control of Induction Motor-Principle andDaniel GutierrezNo ratings yet
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNo ratings yet
- Modeling of VSC-HVDC and Control Strategies For Supplying Both Active and Passive SystemsDocument6 pagesModeling of VSC-HVDC and Control Strategies For Supplying Both Active and Passive SystemssunitharajababuNo ratings yet
- A Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterDocument7 pagesA Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterSriharsha SanthapurNo ratings yet
- C. Buck-Boost Converter Modeling D. Cuk Converter Modeling: Di V DT L TDT Qon DV V DT C RDocument6 pagesC. Buck-Boost Converter Modeling D. Cuk Converter Modeling: Di V DT L TDT Qon DV V DT C RTeja VaitlaNo ratings yet
- DC-DC Converters Via Matlab/SimulinkDocument8 pagesDC-DC Converters Via Matlab/SimulinkAnonymous XXqrTWWNo ratings yet
- 2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaDocument3 pages2010 - State Space Controller For Bidirectional DC-DC Converter Buck Mode - OcilkaWGSNo ratings yet
- Custom9 PDFDocument7 pagesCustom9 PDFVenkat SubramanianNo ratings yet
- Simulation of Synchronous Machine in Stability Study For Power SystemDocument6 pagesSimulation of Synchronous Machine in Stability Study For Power SystemZawmin TunNo ratings yet
- 23D AdvanceDocument8 pages23D AdvancePATEL SWAPNEELNo ratings yet
- DC-Link Voltage Control of A Single-Phase Photovoltaic InverterDocument6 pagesDC-Link Voltage Control of A Single-Phase Photovoltaic Invertertinhmaixatoi2006No ratings yet
- Position Control of An Electro-Hydraulic Servo System Using Sliding Mode Control Enhanced by Fuzzy Pi ControllerDocument14 pagesPosition Control of An Electro-Hydraulic Servo System Using Sliding Mode Control Enhanced by Fuzzy Pi ControlleralbertofgvNo ratings yet
- Simulation of Electric Machine and Drive Systems Using Matlab and SimulinkDocument17 pagesSimulation of Electric Machine and Drive Systems Using Matlab and SimulinkSamuel Alves de SouzaNo ratings yet
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CNo ratings yet
- Bifurcation Analysis of PWM-1 Voltage-Mode-Controlled Buck Converter Using The Exact Discrete ModelDocument11 pagesBifurcation Analysis of PWM-1 Voltage-Mode-Controlled Buck Converter Using The Exact Discrete Modelrohit17088No ratings yet
- SMC BDC ConvertersDocument10 pagesSMC BDC ConvertersJakdaksh HarshNo ratings yet
- Michał KNAPCZYK, Krzysztof PIEŃKOWSKIDocument12 pagesMichał KNAPCZYK, Krzysztof PIEŃKOWSKIMahmoud FawziNo ratings yet
- Modeling of The State Transition Equations of Power Systems With Non-Continuously Operating Elements by The RCF MethodDocument6 pagesModeling of The State Transition Equations of Power Systems With Non-Continuously Operating Elements by The RCF Methodkanda71No ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- MOTION-LVIEW ManualDocument22 pagesMOTION-LVIEW ManualGOST TECH GOST-технологияNo ratings yet
- CD File.Document30 pagesCD File.Aditya PugaliaNo ratings yet
- Fundamentals of Risk Management BrochureDocument5 pagesFundamentals of Risk Management BrochureAnonymous q2xeC58dNo ratings yet
- EC Centrifugal Fans RadiPac PDFDocument136 pagesEC Centrifugal Fans RadiPac PDFcoolguy19895No ratings yet
- Gkt-Battery System-0709Document5 pagesGkt-Battery System-0709rajan25No ratings yet
- SAP PS - Project Profile 10Document4 pagesSAP PS - Project Profile 10tarini acharyaNo ratings yet
- College Magazine ReportDocument37 pagesCollege Magazine ReportAlish Zidan50% (2)
- Business Process UtilitiesDocument7 pagesBusiness Process UtilitiesSourin MukherjeeNo ratings yet
- IEEE Transformer PresentationDocument20 pagesIEEE Transformer PresentationKarthik Joshi100% (1)
- Adab of A Digital CitizenDocument54 pagesAdab of A Digital CitizenNije MohdNo ratings yet
- Ultramax 73Document46 pagesUltramax 73Al DoNo ratings yet
- Accelerate Operational Efficiency & Agility in ManufacturingDocument11 pagesAccelerate Operational Efficiency & Agility in ManufacturingscoutyNo ratings yet
- Vision: VDA Infosolutions Private LimitedDocument18 pagesVision: VDA Infosolutions Private LimitedsudhakaremcNo ratings yet
- Expt 4 Title: Dismantle & Assemble Hermetically Sealed CompressorDocument6 pagesExpt 4 Title: Dismantle & Assemble Hermetically Sealed CompressorHritik Mali PatilNo ratings yet
- JNTUH B.Tech 3 Year CSE R16 SyllabusDocument40 pagesJNTUH B.Tech 3 Year CSE R16 SyllabusPallavi BottuNo ratings yet
- Fault Codes For CASE Wheel Loaders (PDF, EnG, 125 KB)Document5 pagesFault Codes For CASE Wheel Loaders (PDF, EnG, 125 KB)Henry Huayhua100% (1)
- 10-5 Installing Software AG ProductsDocument84 pages10-5 Installing Software AG ProductsFrank zmNo ratings yet
- Conceicao (Sa) Technoeconomic Paradigms and Latecomer IndustrializationDocument27 pagesConceicao (Sa) Technoeconomic Paradigms and Latecomer IndustrializationAntonio MuñozNo ratings yet
- Department of EducationDocument2 pagesDepartment of EducationYanika BarasNo ratings yet
- SJ5000x Elite Manual 2016 - ENDocument17 pagesSJ5000x Elite Manual 2016 - ENdaveymgNo ratings yet
- W8 Technology HumanityDocument38 pagesW8 Technology HumanityJerald BacacaoNo ratings yet
- EC6405-Control Systems EngineeringDocument17 pagesEC6405-Control Systems EngineeringAjju K AjjuNo ratings yet
- Chapter 7-01 Reliability and MaintainabilityDocument30 pagesChapter 7-01 Reliability and MaintainabilityMuket AgmasNo ratings yet
- Basic Process RigDocument4 pagesBasic Process RigNatashah Ashraf100% (1)
- Darlene MannDocument17 pagesDarlene MannRamj123No ratings yet