Professional Documents
Culture Documents
Algebra Lineal Con Aplicaciones - Gareth Williams
Uploaded by
Felipe Javier Ruiz Rivera83%(6)83% found this document useful (6 votes)
1K views663 pagesCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Attribution Non-Commercial (BY-NC)
Available Formats
Download as PDF or read online from Scribd
83%(6)83% found this document useful (6 votes)
1K views663 pagesAlgebra Lineal Con Aplicaciones - Gareth Williams
Uploaded by
Felipe Javier Ruiz RiveraCopyright:
Attribution Non-Commercial (BY-NC)
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 663
sce Fike neat
con ee ae
ferret fac)
(rica Wary
Algebra lineal
con aplicaciones
GARETH WILLIAMS
STETSON UNIVERSITY
Traduccion:
Ma. del Carmen Hano Roa
Jorge Yescas Milanés
Traductores profesionales
Revision técnica:
M.C. Abel Valdés Ramirez
Jefe de Matematicas
Escuela Superior de Ingenieria Quimica ¢ Industrias Extractivas
Instituto Politécnico Nacional
McGRAW-HILL
MEXICO * BUENOS AIRES * CARACAS * GUATEMALA * LISBOA * MADRID
NUEVA YORK + SAN JUAN « SANTAFE DE BOGOTA + SANTIAGO * SAO PAULO
"AUCKLAND * LONDRES + MILAN * MONTREAL + NUEVA DELHI
SAN FRANCISCO * SINGAPUR ® ST. LOUIS * SIONEY * TORONTO
Gerente de producto: Francisco E. Vargas Reyes
Super Felipe Heméndez Carrasco
Supervisor de produceién: Zeferino Garcia Garcis
ALGEBRA LINEAL CON APLICACIONES
Prohibida la reproduccién total o parcial de esta obra,
or cualquier medio, sin autorizacién escrita del editor
DERECHOS RESERVADOS © 2002, respect ala primera edicién en espafiol por
McGRAW-HILL/INTERAMERICANA EDITORES, S.A. DE C V.
A Subsidiary of The McGraw-Hill Companies
Cedro Nim. 512, Col. Atampa
Delegacin Cuauhtemoc,
06450, México, DF.
Miembro de la Cémara Nacional de la Industria Bitorial Mexicana, Reg, Num, 736
ISBN 970-10-3838-X
‘Translated from the fourth English edition of
Linear Algebra with Applications
Gareth Williams
Copyright © 2001, by Jones and Barlett Publishers, Inc
All rights reserved
ISBN 0-7637-1451-8
34567890 09876542103
Impreso en México Printed in Mexico
Esta obra se tering de
‘imprinon Diciembre dl 2003 en
UTOGRAFICA INGRAMEX
Cenieno Nim 162-1
Dolegacion tnapalapa
CP 08610 Meso OF
Dedico esta obra a Justin
El comité del Undergraduate Program in Mathematics (CUPM), en sus recomendaciones
para Reshaping of College Mathematics. precisa que, para gran parte de Tas matemtich)
vtcadas moderas, ese gebra fines, por lo menos tan fundamental como el ealevo,
zebra inal es prerequisito para muchos otros cursos. El report contin sugirend qv
aunque la abstacciGn debe seguir siendo un propésito valiosa en ls cursos introdycos
sjeigebra lineal una meta importante debe sor el hacer énfasis en tas aplicaciones y Jos
ae eaee de ealculo, abriendo el curso al gran grupo de estudiantes que necesitan del uso
del algebra lineal
sacarejoce en estas recomendaciones, ete libro esté disefiado como un curso jntro-
luctario a algebra lineal. Es una mezcla flexible de teora,(éenieas de eileulo importantes
$ aplicacions interesante. Los maestros pueden seeccionar Tos tema gus den af 0 1
Tertpectva que ells deseen yasignar com Teetras generals temas ue den a estan
tuna idea més completa de Ia materia.
Firtenciones y objetivos
‘sar Jos fundamentos matematicos sétidos de algebra lineal.
npo. Es importante,
ar Jos algoritmos
Introducir algunos aspectos importantes de los cileutos en este
por ejemplo, que los estudiantes sean capaces de entender y ana
involucrados.
|. Tratar algunas aplicaciones interesantes de manera que los estudiantes sepan cme
adhd aplicar el dlgebra Tineal. Las aplicaciones se han tomado de diferentes éreay
Como arqucologia, teorfa de cédigos, geometria fractal y relatividad
Organizacién El libro estd organizado en alrededor de 26 secciones centrale En estas
oraermes se wratan tenicas numéricas y aplicaciones, Un curso te6rico se puede bas
sien ccciones centrale. Espero que a los estudiantes de un curso con interés {e660
coe able también de consideraciones relativas a 10s eéeulos y a las aplicaciones, Per
a ese, un curso orientado mas a los aspectos del edleulo 0 fas aplicaciones puede
toca geramente partes de Ia teorfa de estas secctones centales, ¢incluir. también, varios
temas de las secciones opcionales.
Matematicas El slgebra lineal es una materia fundamental en los cursos de matemdlics
eaare rr ecneiatura Hay temas importantes que se deben tocar en este curso, por eemple
‘ependencia lineal base, producto interno y trnsformacién lineal debiendo Ser WI total
¥cuidadosamente, Estos temas no sélo son importantes en dlgebra neal sino Gut también
Xen prerrequisitos para otros cursos como el de ecuaciones diferenciales, En este libro se ha
puesto gran cuidado en presentar los temas “estindares” del Sgebra lineal
“Fosnapng Calpe Mathematics, Un groecto elcome Undergrad, Program im Matera MAA
Haener icc 18 paging 21, The Mathematical Assocation of America, 1989,
viii
Prefacio
Con frecuenci, para los estudiantes éste es el primer curso sobre mateméticas
abstractas. No se debe abrumar al lector con demostraciones, sin embargo, sf hay que
tensefiarle cémo demostrar teoremas. Se dan las demostraciones de algunos teoremas, que
resultan instructivas; algunas demostraciones se dan en forma esbozada y otras se omiten,
Hay que introducir a los estudiantes de manera lenta y cuidadosa en el arte de desarrollar
¥ escribir demostraciones. Esta habilidad es esencial en matemiticas. Se debe entrenar
al estudiante para pensar matematicamente. Por ejemplo, el concepto de si y silo si es
muy importante en mateméticas y en el dgebra lineal surge de manera muy natural. Se
introduce este concepto con un ejemplo que demuestra que el producto AB de dos matrices
simétricas A y B del mismo tamaio, es simétrico si y s6lo si AB = BA. Nuevamente, el
lector se encuentra después con este concepto en varias ocasiones.
Una raz6n por la que el curso de algebra lineal es un curso adecuado para introducir el
pensamiento matemiitico abstracto es que gran parte del material tiene una interpretacién
geométrica; el estudiante puede visualizar los conceptos. De manera reciproca, el algebra
lineal ayuda a desarrollar el instinto geométrico del estudiante, En este curso, la geometria
y el Algebra van de la mano, El proceso de empezar con hechos conocidos del espacio
bidimensional y gencralizarlos am dimensiones surge en forma natural. He intentado
censefiar el arte de desarrollar axiomas,
Computacién Aunque cl algebra lineal tiene su lado abstracto, también tiene su lado
numérico. Algoritmo es una palabra con la que el estudiante debe haberse familiarizado
al final del curso. El estudiante participa en el proceso de determinar exactamente dénde
unos algoritmos son mejores que otras, Por ejemplo, se discute el algoritimo de Strassen
para la multiplicacién rapida de matrices. El lector debe saber que se sigue haciendo
investigacion para encontrar algoritmos mas répidos para la manipulacién de matrices.
La computadora se usa con frecuencia al aplicar el :ilgebra. El lector tiene la
‘oportunidad de pensar en hacer matemyticas en la computadora, Por ejemplo, se le pide al
estudiante predecir et resultado que obtendrii en una computadora si se aplica un programa
de climinacién de Gauss-Jordan a una matriz de 3 X 3. Se estudia el error de redondeo en
Ja computadora. Se le pregunta al estudiante si una computadora tiene mayor capacidad
para dar una solucién de un sistema de ecuaciones lineules que no tiene solucién, ©
viceversa, Las computadoras nos estan permitiendo reflexionar sobre la manera de enserar
el algebra lineal. EI maestro puede enseiar la materia consciente de la capacidad de las
computadoras como se vio arriba sin necesidad de usar una computadora,
Para aquellos que quicran integrar la computadora al curso se incluye en el apéndice
un manual de MATLAB. MATLAB es el software més usado para trabajar con matrices.
EI manual consiste de 27 secciones vinculadas con el material del curso. Al principio
de cada seccién se da un breve resumen de las mateméticas relevantes. Se introducen
funciones de MATLAB, tales como inv(A) para encontrar la inversa de una matriz, y
también se proporcionan programas escritos en el lenguaje de MATLAB. Los programas
incluyen no s6lo los que hacen célculos, como por ejemplo, eliminacién de Gauss-Jordan
con opeién para mostrar todos los pasos. también hay programas con aplicaciones a
igrafos, a cadenas de Markov y un viaje simulado en el espacio-tiempo, Aunque este
manual se presenta en términos de MATLAB, las ideas serdn de interés general, y se
pueden usar como una guia para integrar cualquier paquete de software al curso, Los
elercicios se pueden hacer con cualquier software para dlgebra de matrices.
Ahora también se usan en dlgebra lineal ealculadoras graficadoras, Hay calculadoras
para llevar a cabo célculos con matrices y para caleular formas escalonadas reducidas. En
el apéndice C se presenta un manual para integrar la calculadora al curso.
Prefacio ix
‘Aplicaciones EI élgebra lineal es un tema amplio de matemaéticas. Su espectro se extiende
desde lo abstracto, a través de técnicas numéricas, hasta innumerables aplicaciones.
He tratado de dar al lector una visidn de la gran cantidad de aplicaciones interesantes,
Estas aplicaciones van desde las te6ricas, como el uso del lgebra lineal en ecuaciones
diferenciales y el anilisis de minimos cuadrados, hasta diversas aplicaciones prcticas en
campos como la arqueologia, la demografia, la ingenieria eléctrica, el andlisis del trfico, la
‘geometria fractal, la relatividad y la historia. Todas estas aplicaciones son independientes,
Yy muchas ayudan a realizar proyectos en grupo.
He tratado de estimutar el interés del lector al seleccionar una gran variedad de
aplicaciones de la vida real. Estas van desde observar el trafico en el centro de Jacksonv' ille
hasta predecir el tiempo en Tel Aviv. Se presenta también una discusion sobre las razones
posibles para que Mosct haya sido la capital de Rusia. El lgebra lineal se usa en teorfa de
Ta relatividad para predecir que una persona que haga un viaje redondo a Alfa Centauro
(0.8 veces la velocidad de Ia luz envejeceré 6 afios, mientras que una persona en Ja Tierra
‘envejecera 10 aiios. ;Aqui debe haber algo que interese a la mayoria de las personas!
He tratado de involucrar al lector en las aplicaciones mediante ejercicios que amplian
tos tratados, Para la mayoria de las personas no resulta fécit aplicar las matematicas;
tienen que ser entrenadas en este arte, y zdénde mejor que en un curso de élgebra lineal
‘con su caudal de aplicaciones?
Caracteristicas nuevas de esta edicién El libro conserva la filosofia de las ediciones
anteriores que ¢s integrar mateméticas, cdtculos y aplicaciones de manera flexible. Se
hhicieron muchos cambios pequefios para mejorar las explicaciones, actualizar las fechas y
los hechos y mejorar los ejercicios. Los cambios principales son los siguientes.
« Introduccién a los métodos de eliminacién Se da una mejor introduccién al
‘método de Gauss-lordan, Se ilustra el método usando de manera paratela la ecuacién
yy la matriz, Este método no es, por supuesto, la manera més eficiente de resolver
tun sistema de ecuaciones lineales (se precisa esto) pero es el método més directo
inicialmente. Aun cuando los estudiantes pronto hardn uso de la tecnologfa para calcular
Formas escalonadas reducidas, me parece que es necesario una buena comprensién
de este método (un método) porque esto lleva, después, a una mejor comprensién de
‘otros, En términos de este método se pueden presentar ideas de gran valor relacionadas
con los caleulos.
= Elespacio vectorial R" Este capitulo se reescribié totalmente, Ahora contiene
tuna introduccién a los conceptos de producto punto, dngulo, magnitud y
‘También conticne una introduccién a las transformaciones lineales con aplicaciones
1 gréficas por computadoras y fractales.
« Espacios vectoriales en general Los conceptos de combinacisin lineal de vectores,
dependencia lineal y dimensién se presentan ahora en este capitulo, dentro del contexto
de espacios vectoriales en general, y no en R" como en ediciones anteriores. Los
maestros que quieran dar un curso enfocado a R” pueden omitir lo tratado sobre
espacios de funciones y matrices.
«Valores propios y veetores propios Ahora se dedica un capitulo especial a estos
cconceptos importantes. Su empleo trata de fenémenos con tendencias a largo plazo
y en diagonalizacién de matrices.
= MATLAB y caleuladora graficadora En ediciones anteriores se habl6 de esto &
Jo largo de todo el libro. Ahora este material se ha reunido en manuales separacos
Pretacio
al final de éste. El material se puede integrar al curso, si asf se requiere, pero se
hha colocado todo junto para una referencia facil. La presentacién fue mejorada
¥ Se agregaron programas. Ahora se pueden bajar los programas (M-files) de
wwwstelson.edu/ gwillianv/mfiles.htm,
El flujo del material Todo el libro conticne matemsticas junto con aplicaciones intere-
santes. El estudiante se encuentra con las aplicaciones en forma natural. El método que
he seguido es desarrollar primero las mateméticas y después dar las aplicaciones. Esto,
creo,,da al texto una presentacién clara. Sin embargo, es probable que los maestros
guieran ver primero las aplicaciones y usar éstas como motivacién para las mateméticas
Histéricamente, las matematicas se han desarrollado a través de su interrelacién con I
aplicaciones. Por ejemplo, el anilisis del comportamiento de un modelo de cadenas de
Markov para analizar los movimientos de poblaciGn entre las ciudades y los suburbios
en Estados Unidos a largo plazo: se puede usar para motivar los conceptos de valores
propios y vectores propios. Aungue no se debe exagerar en el uso de esta metodologi
ésta puede ser muy instructiva,
Capitulo 1 El lector es conducido desde la solucién de sistemas de dos ectraciones
lineales a la solucién de sistemas en general, Se presenta el método de eliminacién de
Gauss-Jordan como el método estindar del curso, por ser un algoritmo “claro y sin
complicaciones” para los pequefios sistemas presentados aqui, Es importante que desde
este momento el estudiante domine el método porque se usard con frecuencia a lo largo
del curso. El capitulo termina con tres aplicaciones. Ajustar un polinomio de grado n — |
am datos conduce a un sistema de ecuaciones lineales que tienen una solucidn dinica, De
paso, hacemos notar que si el polinomio es de grado mayor a1 ~ 1, hay muchas solucio-
nes, mientras que si el polinomio es de grado menor an ~ 1, en general, no hay solucisn
(El lector encontrar el método de minimos cuadrados més adelante en el curso.) El
andlisis de redes eléctricas y del flujo del trafico dan lugar a sistemas que tienen un:
solucién tiniea y muchas soluciones. respectivamente. El modelo para el flujo del tréfico es
semejante al de las redes eléctricas, pero tiene menos restricciones, lo que conduce a mayor
libertad y de esta manera a muchas soluciones en lugar de una sola
Capitulo 2 En el primer capitulo se usaron matrices para trabajar con sistemas de
ecuaciones. Esta aplicacién motiva el desarrollo algebraico de la teorfa de matrices en
este capitulo. Ademés del desarrollo de las propiedsdes de Ia suma de matrices, de li
multiplicacién escalar, de la multiplicacién de matrices y del inverso de una matriz, se
presentan ideas interesantes sobre los calculos. Por ejemplo, verde! lector que la propiedad
asociativa de la multiplicacién de matrices permite reducir hasta en un 50% la cantidad
de célculos al multiplicar tres matrices, Se presenta el algoritmo de Strassen para la
multiplicacin répida. Se presenta también una breve, pero bella, aplicacién de las matrices
a la arqueologfa, que ilustra la importancia de la multiplicacién de matrices, de la inversa
y de las matrices simétricas. EI lector puede prever, debido a razones fisicas, por qué el
producto de una matriz.y su transpuesta tiene que ser una matriz simétrica, y después
Hegar a esto matematicamente. jEsto es lo mejor de as matemiticas! El capftulo termina
con tres secciones opcionales de aplicaciones que resultarén muy atractivas. Se usa el
modelo de entradas y salidas de Leontief para economia, para analizar la interdependencia
de las industrias. Wassily Leontief recibié el premio Nobel en 1973 por su trabajo en
esta area, Un modelo de cadenas de Markov se usa en demografia y genética, y se san
digrafos en comunicacién y sociologéa. EI maestro que no pueda incluir estas secciones en
su tiempo de clase, debe recomendar a los lectores que revisen estas secciones. Todos estos
temas son independientes y se pueden dar como proyectos o tareas,
Prefacio xi
Capitulo 3 Los determinantes y sus propiedades se presentan tan ripida y fécilmente
como sea posible, Se dan algunas pruebas que pueden omitirse si el maestro asf lo desea,
Capitulo 4 Este capitulo contiene una introduccién a R®. Se presentan la adicién de
vectores y la multiplicacin escalar, asentando ast las bases para la introduccin posterior
a espacios vectoriales abstractos. El producto punto conduce a la geometria en RM: las ideas,
de angulo, magnitud y distancia se desarrollan a partir del producto punto. Este capitulo
contiene también una introduccidn a las transformaciones lineales. El lector ve eémo se
puede usar una transformacién matricial para dibujar un helecho fractal
Capitulo 5 En este capitulo ya se tienen los cimientos para un planteamiento més
te6rico. Se desarrolla la estructura de espacios vectoriales abstractos. Se presentan Tos
conceptos de subespacio, independencia lineal, bases y dimensin. Siempre que es posible
se les da a estas ideas una interpretacién geométrica. La ultima seccidn sobre el rango,
reiine muchos de los conceptos anteriores. El lector verd que inversa de una matriz,
determinante, rango y unicidad de la solucién estén relacionados,
Capitulo 6 Se presentan valores propios, vectores propios y aplicaciones de éstos.
Se considera también espacios propios y diagonalizacién de matrices. Los estudiantes ven
cl papel de os valores propios y de los vectores propios en aplicaciones como el andlisis
de las tendencias a largo plazo de los movimientos de una poblacin, Ia prediccién del
tiempo y la determinacién de modos normales de sistemas oscilantes.
Capitulo 7 Este capitulo se basa en la introduccién de transformaciones lineales,
en R®, tratada con anterioridad en el capitulo 4. Se encuentra que las transformaciones,
lineales son las estructuras que preservan mapeos de espacios vectoriales. Se presentan
temas centrales como niicleo, rango y el teorema de rango y nulidad. Se le ha dado gran
atencién a la notacién al hablar de representaciones matriciales. Aquf (y en realidad en
todas las matematicas) una buena notacién puede significar una buena conceptualizacién.
Se le aclara al lector que dominar la notacién es una parte importante del entrenamiento,
matematico. Se usan las transformaciones lineales, eI nicleo y el rango para darle al lector
‘una imagen geométrica del conjunto de soluciones de ecuaciones lineales homogéneas
© no homogéneas.
Capitulo 8 Este capitulo es una continuacién natural del proceso de pensamiento
desarrollado en los capitulos anteriores. Las estructuras algebraicas y geométricas del
espacio vectorial R” se extienden a otros espacios como los espacios de matrices y
funciones. Se dan los axiomas de espacios con producto interno, La teoria se aplis
al problema de aproximar funciones mediante polinomios. Se trata la importancia de
estas aproximaciones para el software de computadoras. No pude resistir la tentaci6n de
presentar el uso de la teoria de espacios vectoriales en la deteccién de errores de c6digos.
Se presenta el cédigo Hamming. cuyos elementos son vectores sobre un campo finito.
‘También se introduce al lector « la geometrfa no euclidiana, lo que lleva a una discusién
independiente del modelo de relatividad especial del espacio-tiempo. Después de haber
desarrollado el espacio general con producto interior, el lector encuentra que este marco
no es apropiado para la descripcién matemética de espacio-tiempo. El axioma de mattiz.
determinada positiva se descarta, abriendo la puerta, primero para el seudoproducto
interior, que se usa en relatividad especial, y después, para uno que describe la gravedad en
relatividad general. En este momento resulta adecuado, primero, hablar de la importancia
de dominar las estructuras matemidticas estndar, como por ejemplo el producto interior, y
después, indicar que con frecuencia en Ia investigacién matemitica es necesario cambiar
los axiomas de tales estructuras
Las aplicaciones que se encuentran en este capitulo puede que sean las mas interesantes
de todo el curso. Se usa el concepto de matriz. seudoinversa para Hegar a la solucién,
xii
Prefacio
mediante minimos cuadrados, de un sistema de ecuaciones sobredeterminadas. Esta
herramienta se usa después para determinar la curva de minimos cuadrados para datos
dados. Aqui se revinen de manera elegante y poderosa varios resultados te6ricos, para
producir una importante herramienta de cileulo.
Capitulo 9 Este capitulo sobre técnicas numéricas es importante
practican el algebra lineal en los ambientes compatacionales de hoy dia, He incluido la
eliminacién gaussiana, la descomposiciéin LLU, y los métodos iterativos de Gauss-Seidel y
de Jacobi. Se discuten las ventajas de los diferentes métodos para resolver sistemras lineales
Ademis, se discuten los temas estindar de error de redondeo, pivoteo y escalamiento
Me parecié importante y adecuado presentar dentro del dmbito de este curso el concepto
de condicionamiento. Es muy interesante volver a algunos de los sistemas de ecuaciones
presentados antes en el curso y ver cusn confiable es Ia solucién. Por ejemplo. la matriz
de coeficientes de un problema de minimos cuadrados es, con frecuencia, una matriz de
Vandermonde que lleva a un sistema condicionado. El capitulo concluye con métoxios
iterativos para encontrar valores y vectores propios dominantes, Esta discusién lleva, de
manera natural, a una discusién sobre las técnicas que usan los ge6grafos para medir la
accesibilidad relativa de nodos en una red
Capitulo 10 Este tltimo capitulo da al estudiante una breve introduccién a las ideas
de programacién lineal. Este campo, desarrollado en 1947 por George Dantzig y su equipo
cn el departamento de la fuerza aérea de Estados Unidos, es hoy ampliamente usado en
Ja industria, y tiene sus fundamentos en el Algebra lineal. Los problemas se describen
mediante sistemas de desigualdades lineales. B! lector verd que sistemas pequefios pueden
ser resueltos geométricamente, pero sistemas grandes se resuelven usando operaciones en
Jos renglones de las matrices mediante el algoritmo simplex,
ia aquellos que
[Beracteristicas de los capitulos
+ Cada seccién empieza con una motivacién introductoria que vincula el material con
los temas aprendidos previamente.
+ Ladificultad del libro aumenta gradualmente, Conforme el estudiante madura materi
ticamente, las explicaciones se van volviendo mas sofisticadas,
6n se desarrolla gradualmente, Es importante que en este nivel fa notacidn sea
{in mejora la comprensidn,
+ Lanot
estindar, pero se deja alguna flexibilidad, Una buena nota
una mala notacién da una imagen confus,
+ Términos en negritas resaltan Jos términos importantes y las definiciones.
+ Los conceptos s¢ ilustran mediante muchos ejemplos cuidadosamente explicados.
+ El libro contiene una cantidad abundante de ejercicios, Los primeros son por lo
general ejercicios de céleulos, después se vuelven mas te
+ Muchos de fos ejercicios, pero no todos, se basan en los ejemplos dados en el libro,
Es importante que el estudiante tenga la maxima oportunidad de desarrollar sus
hhabilidades creativas.
+ Los ejercicios de repaso al final de cada capitulo se han seleccionado cuidadosamente
para dar al estudiante una visién general de lo visto en ese capitulo.
Prelaco xii
Buptementos
«Un manual de soluciones completo, Soluciones detalladas de todos los ejercicios.
= Manual de soluciones para el estudiante, Respuestas completas a los ejercicios
seleccionados.
«Programas en MATLAB para aquellos que deseen integrar MATLAB al curso
(Disponibles en www stetson.edu/~gwilliam/mfiles htm.)
[Beconocinientos
un placer conocer la ayuda que hizo posible est libro, Mi mas profundo agradecimiento
‘a mi colega Wanda J. Mourant que ley6 ¢ hizo criticas constructivas al manuscrito y que
forganiz6 el manual del instructor para su edicién final, Agradezco a mis colegas Lisa
Coulter, Dennis Kletzing y Michael Branton de Stetson University por sus sugerencias para
hacer de éste un mejor libro. Un especial agradecimiento a Lisa Coulter por desarroltar el
software, Muchos de sus M-files se usan en el apéndice de MATLAB, Agradezco a Carol
J, Harrison de la Susquehanna University y @ Matt Lunsford de la Union University por
sus comentarios constructivos sobre el texto.
‘Agrade7co a la National Science Foundation por su donativo dentro del Curriculum
Development Program para el desarrollo de gran parte del software de MATLAB.
‘Como siempre agradezco a mi esposa Donna por toda su colaboracién matemstica y
computacional y por su continuo apoyo.
Finalmente, una mencidn especial de todos los estudiantes que pasaron por MS 245
y MS 345 en Ia Stetson University donde se probs este material, Sus reacciones y aportacio-
nes a lo largo de los afios han sido invaluables.
Content
Capitulo 1
MW
12
13
Capitulo 2
2
25
26
27
Capitulo 3
31
Prefacio vii
Sistemas de ecuaciones lineales 1
Matrices y sistemas de ecunciones lineales 2
Muchos sistemas 11
Eliminacién de Gauss-Jordan 16
Sistemas homogéneos de ecuaciones lineales 23
Ajuste de curvas. redes eléctricas y flujo de trifico 28
Ajuste de curvas 28
Andlisis de redes eléctricas 30
Flujo de tratico 34
Matrices 43
AdiciGn, multiplicaci6n escalar y multipl de matrices 44
Adicién de matrices 45
Multiplicacién por un escalar de matrices 45
Negacién y sustraccién 46
Multiplicacién de matrices 47
‘Tamafio de una matriz producto 50
Notacién matricial y sistemas de ecuaciones 52
Multiplicacién répida de matrices 52
Propiedades de las operaciones con matrices $7
Potencias de matrices 62
Matrices simétricas y seriacién en arquologia 65
Matrices con elementos complejos 70
Seriacién en arqueologia 72
La inversa de una matriz y
Notacign 79
Eliminacién de Gauss-Jordan para encontrar la inversa de una matriz. 80
Criptografia 85
EI modelo de entradas y salidas de Leontief en economia 89
Cadenas de Markov, movimientos de poblacién y genética 95
Un modelo de comunicacién y relaciones de grupo en sociologia 104
Distancia en un digrafo 107
Relaciones de grupo en sociologia 108
iptogratia 78
Determinantes 119
Introduceién a los determinantes 120
CAlculo de determinantes de matrices de 2x 2y 3.x 3. 124
Definicién alternativa de determinante 125
xvi
32
33
34
Capitulo 4
4a
42
43
44
Capitulo 5
SL
52
53
34
5S
56
7
Contenido
Propiedades de los determinantes 129
Evaluacién numérica de un determinante 136
Evaluacién numérica de un determinante 137
Determinantes, matrices inversas y sistemas de ecuaciones lineales 141
El espacio vectorial R° 153
Inroduccién a los vectores 154
Vector cero 158
Vector negative 159
Sustraccién 159
Vectores columna 162
Producto punto, norma, éngulo y distancia 164
Norma de un veetor en R® 165
Angulo entre vectores 169
Distaneia entre puntos 173
Introduceién alas transformaciones Tineales 178
Composicién de las transformaciones matriciales 182
Transformaciones mairiciales, gdficas por computadoray fractales 185
Rotacién con respecto al origen 185
Representacién matricial 187
Dilatacién y contaccion 188
Reflexign 190
Transformaciones definidas por matrices no singulares 191
Translaciones y tansformaciones afines 193
Transformaciones en gréficas por computadora_ 196
Imgenes de la naturaleza por medio de fracales 198
Espacios vectoriales generales 207
Espacios vectoriales 208
Espacios vectoriales de matrices 209
Espacios vectoriales de funciones 210
El espacio vectorial complejo C" 211
Subespacios 213
Combinaciones lineales de vectores 220
Dependencia ¢ independencia lineal 231
Dependencia lineal de {v,, ¥,) 234
Dependencia lineal de (v,, V3. V5) 235
Bases y dimension 238
Rango de una matriz 248
Vectores ortonormales y proyecciones en R” 257
Proyeccién de un vector sobre otro vector 260
Proyeccién de un vector sobre un subespacio 264
Distancia de un punto a un subespacio 267
Matrices ortogonales 269
Capitulo 6
6A
62
63
64
Capitulo 7
uW
72
73
14
Capitulo 8
8
82
83
84
Contenido wii
Valores propios y vectores propios 275
Valores propios y vectores propios 276
Cleulo de los valores propios y de los vectores propios 276
Demografia y prediccién del tiempo 283
Diagonalizacién de matrices 289
Diagonalizacién de matrices simétricas 295
Diagonalizacién ortogonal 296
Formas cuadriticas, ecuaciones en diferencia y modos normales 300
Rotacién de coordenadas 300. -
Formas cuadréticas 302
Ecuaciones en diferencia 305
SueesiGn de Fibonacci 308
Modos normales de sistemas oscilantes 309
Transformaciones lineales 317
‘Transformaciones lineales, nicleo y rango 318
Terminologia 327
‘Transformaciones y sistemas de ecuaciones lineales 333,
Ecuaciones homogéneas 334
Ecuaciones no homogéneas 335,
Muchos sistemas 338
Vectores de coordenadas 341
Notacién 342
Cambio de bases 345
Isomorfismos 348
Representaciones matriciales de transformaciones fineales 351
Importancia de las representaciones matriciales 355
Relaciones entre representaciones matriciales 358
Representacién matricial diagonal de un operador lineal 360)
Espacios con producto interno 367
Espacios con producto interno 368
Norma de un vector 371
Angulo 372
Vectores ortogonales 373
Distancia 373
Producto interno en C* 374
Geometria no cuclidiana y relatividad especial 378
Relatividad especial 380
Aproximacién de funsiones y teoria de cédigos 385
Aproximaciones de Fourier 388
Teoria de cédigos 390
Curvas por minimos cuadrados 392
Curvas por minimos euadrados 395
xvi
Capitulo 9
94
92
93
94
95
Capitulo 10
10.1
102
103
Apéndice A
Apéndice B
Apéndice C
Apéndi.
Contenido
Técnicas numéricas 409
Bliminacin gaussiana 410
Comparacién de la eliminacién de Gauss-Jordan y la eliminacién gaussiana 413,
EI método de descomposicién LU 416
Método de descomposicién LU. 418
Construccién de una descomposicién LU de A 421
Dificultades précticas en ta solucidn de sistemas de ecuaciones 424
EI niimero de condicisn de una matriz 424
‘Téenicas de pivoteo y de escalamiento 429
Procedimientos de pivoteo y de escalamiento 432
Métoxios iterativos para la solucién de sistemas de ecuaciones lineales 436
Método de Jacobi 436
Método de Gauss-Seidel 438
Comparacién entre Ia climinacién
Valores propios mediante iteracién:
Deflacién 446
Indice de uccesibilidad de una red 446
wussiana y Gauss-Seidel 440
‘onectividad de redes 441
Programacién lineal 453
Introduecién geométrica a fa programacién lineal 454
Un problema de programacién lineal 456
Valor minimo de una funcién 459
Andlisis del método 461
Método simplex 464
Explicacién geomeétrica del método simplex 471
Producto cruz 479
Ecuaciones de planos y de rectas en tres dimen
Manual para calculadoras graficadoras 499
Manual de MATLAB 513
Respuestas a los ejercicios seleccionados 575
indice 639
Sistemas de ecuaciones
lineales
SE Memsicas son, por supuesto, una disciplina. Sin embargo, también es
una herramienta que se usa en muchos campos. El algebra lineal es una rama de
las matematicas modernas que juega un papel central y que también tiene una
iemportancia cada vee mayor ert la ingenieria y en la fisica, en las clencias sociales
y del comportamiento, En este curso aprender’ matematicas y se le enseftard
también el arte de aplicar las matematicas; el curso es una mezcla de teoria,
tecnicas numéricas y aplicaciones. Por ejemplo, extenders la geometria euclidiana
de dos dimensiones a.n dimensiones y generalizara despues estos resultados para
llegar a la geometria no euclidiana, Desarrollara modelos matematicos, es dec,
“representaciones” matematicas de problemas y vera cémo esas descripciones
pueden llevar a una comprension mas profunda de los problemas
Entre las aplicaciones estaran las que se hacen a la industria aeroespacial,
4 circuitos eléctricos, a redes de comunicacién, a la arqueologia, a la prediccion
del tiempo, @ movimientos de poblacion, a la relatividad y al analisis de rutas
mercantiles en Rusia. El propésito del curso es dar un conacimiento de las areas
|e ES
Sistemas de ecuaciots hin
2 Capitulo 1
principales del algebra lineal, desarrollar la habilidad de aplicar las matematicas, y
al mismo tiempo, ensefar ai lector a pensar matematicamente
Cuando se usan las matematicas para resolver un problema, con frecuencia
resulta necesario encontrar 'a solucién de un llamado sistema de ecuaciones
lineales. Histéricamente el eigebra lineal se ha desarrollado por la necesidad de
tan
estudiar métodos para resolver tales ecuaciones. En este capitulo se pres
métodos para resolver sistemas de ecuaciones lineales y se dan ejemplos de
problemas que se reducen a resolver tales ecuaciones, Las técnicas de este capitulo
se usarén a través del resto del curso.
Matrices y sistemas de ecuaciones lineales
A una ecuacién como la ecuacién x + 3y = 9 se le Hania una ecnacivin finewl, La
aréfica de esta ecuacién es una linea recta en el plano yy. Considere un sistema de
dos ecuaciones lineales,
A un par de valores de x y y que satisfacen ambas ecuaciones es a lo gue se le tama
una solueién, Por sustitucién se puede ver que.x = 3 y y = 2 es una solucidn de este
sistema. Una solucidn de uno de estos sistemas seri un punto en el que las grificas de las
dos rectas se intersecten. Estos sistemas de ecuaciones pueden presentar res posibilida
des, como se ilustra en Jos siguientes ejemplos. Puede haber una solucisn tiniea, ninguna
solucién o muchas soluciones.
Nuestro objetivo en este capitulo es analizar sistemas de ecu
ecuacién Hineal en n variables tiene la forma
jones grandes, Una
yk, + dgty + ayy + Hat, =
Solucién tinica
rtive9
Detye 4
Ls hineas se ntrsetan en el punto (3.21
SoluciinGnica, x = 3.9 =
Figura 1.1
‘Ninguna solucién
-aty=3
aes dpa?
Las lneas son paralelas. No hay punt
Ue inlersseisn. No hay solic
Figura 1.2
‘Muchas soluciones
Ade 6
oro
Amas eeuseione sh misma gre,
“Todo punto dl estes os uns slain,
Muchas sluciones,
| / wees
Figura 13
DEFINICION
1.1 Mateicesy sistemas de ecuaciones lneales
donde los coeficientes a). dy, dy... 4, ¥ b son niimeros reales. El siguiente es un ejemplo
de un sistema de tres ecuaciones Tineales.
yt yt y= 2
Qypt3gt = 3
‘Una ecuacidn lineal con tres variables corresponde a un plano en el espacio tridimensional
Las soluciones al sistema serdn puntos que se encuentren en los tres planos. Para estos
sistemas, como para los sistemas de dos ecuaciones, puede haber una solucidn Gnica,
muchas soluciones o ninguna soluciGn. En la figura 1.4 ilustramos algunas de las distintas
posibilidades
Conforme el mimero de variables aumenta, la interpretacién geométrica de tales
sistemas se hace mas complicada, Cada ecuacisn representaré un espacio dentro de un
espacio ms grande, Las soluciones serdn puntos que se encuentren en todos estos espacios
dentro de un espacio mas grande, El método geoméirico para visualizar las soluciones
resulta poco prictico. Debemos apoyarnos inicamente en los métedos algebraicos.
Presentamos un método para resolver sistemas de ecuaciones lineales, conocido como
climinacién de Gauss-Jordan.!
En esta seccidn veremos cémo se aplica este método a sistemas de ecuaciones que
tienen una solucién Gnica. Estos sistemas se presentan coménmente en tas aplicaciones,
¥y merecen una atencién especial. Con frecuencia, se sabe de antemano, que un sistema
de ecuaaciones tiene una solucién Gnica debido a fa situaciGn que describe. Veremos, por
tejemplo, que las corrientes en una red se encuentran resolviendo uno de estos sistemas de
‘cuaciones lincales. En el método de eliminacién de Gauss-Jordan se eliminan de modo
sistemético las variables de las ecuaciones. En la seccidn siguiente extenderemox el estudio
del método a sistemas de ecuaciones lineales mds generales.
Para describir sistemas de ecuaciones lineales usaremos arreglos de nimeros Hamados
terminologia necesaria
matrices. Ahora, se introduce
Una matriz es un arreglo rectangular de niémeros. A los ntimeros en el arreglo se Tes
Hama elementos de la matri.
"Gar Fricarich Gauss (1777-1855) fue un de los matemaicos mis grandes de todos ls tiempos, Fue profesor
dornte 47 aos en la Universidad de Gottingen, Alemania, ¢ hizo contibuciones a fa teria de nimeros,
ta pido, tw estacay a I era de fancies. Descubris wn manera de caleulr las its de los
aaercnden A Gaus se le dexcibi “no como un fsica en ct sentido de invesigar nuevos fendmenos sino mis
Tor come un matemtico que wataba de formula en tminos matemsticos exactos lox resuliados experimcotales
Joven Su ida personal fe tga, suff los distrbios politicos y fs problems fnancierns relacionados
Te revolucign ranceaay 1a revolucion Jemoctiica de Alemania. Wilhelm Jordan (1842-1899) fue profesor de
recta en fa Universidad Técnica de Karlsruhe, Alemania Su obra principal fue wn manut sobre geodesia
aemtcnta wa tabajo sae sistemas de ecuaciones, A Tordan se le considers un excelente profevor y itor
4 Capitulo 1 Sistemas de ecuaciones ineales
Solueién tinica sige
c id
Las ues planos A By Cac intrsetan en un solo punt P, A
corresponde ana solucién nics
Los panos A.B y Cno tienen puntos en comin,
No hay soli
; fs
Muchas soluciones.., "
Los tres planos A,B y Ce inersectan
ena linea PO. Cualquer punto de Ie linea
es una solcién,
‘Las tres ecuaciones representan el mismo ,
plano, Cvalqies punts en el plano es
tna solucidn: a)
8
1.1 Matrices y sistemas de ecuacioneslineales
Las matrices se denotan generalmente con letras maytisculas. Los siguientes son
ejemplos de matrices en la notacién estindar
Renglones (filas) y columnas Las matrices constan de renglones filas) y de columnas.
Los renglones (filas) se numeran de arriba hacia debajo, y las columnas de izquierda a
derecha. La matriz siguiente tiene dos renglones y tres eolumnas
Bcf
Los renglones son:
ba-d O s-3
reoglin ia) eng ile)2
Las columas son
2 js -4]
7 ls 1
columa! colina 2 eolumn3
Submatriz Una submatriz de una matriz dada es un arreglo que se obtiene eliminando
algunos renglones (filas) y columnas de ta matriz. Por ejemplo, considere la siguiente
matriz A. Las matrices P,Q y R son submatrices de fa matriz A.
17 4| 7 7
A=|2 3g) 3 Q=-|3
s 1-2 1) 1
rmatriz A submatrices de A
Tamajioy tipo El tamafio de una matriz se define especificando el némero de renglones
(filas) y de columnas de Ia matriz. Por ejemplo, una matriz que tiene dos renglones ¥
tres columnas se dice que es una matriz 2 X 3; el primer niimero indica el niimero de
renglones, y el segundo indica el niimero de columnas. Si el niimero de renglones es igual
‘al numero de columnas se dice que la matriz es cuadrada. A una matriz.que tiene un solo
renglén sé le llama matriz renglén. A una matriz que tiene una sola columna se le Tama
matriz columna, Las matrices siguientes son del tamafo y tipo que se indica.
Capitulo 1 Sistemas de ecuaciones hneales
- > fas? i
poy [eee \
be 44 “35 8 L
wmarig 2x3 marie 3 3 matt 3 x |
matriz cuadrada matriz columna
Posicién La posicién de los elementos en una matriz se especifica dando el renglin y ka
columna en los que se encuentra el elemento. Por ejemplo, en la matriz siguiente:
2 3-4)
7 5-1)
El elemento 7 esti en el renglin 2, columna 1. Decimos que esté en la posicisin (2, 1)
El elemehio en la posicion (1. 3) es —4. Observe que la convencisn consiste en dar el
renglén en el que se encuentra el elemento, seguido de Ja columna,
matriz identidad es una matriz cuadrada con unos en las
3), ete. de Ia diagonal y ceros en todas las demas posiciones
Matrices identidad Un:
posiciones (1, 1), 22),
Representamos con J, a la matriz identidad 1% n, Las matrices siguientes son mi
identidad.
Ahora ya estamos listos para continuar con nuestro estudio de Jos sistemas de ectstciones
Tineales,
Para describir los sistemas de ecuaciones lineales se usan matrices. Hay dos matrices
asociadas a cada sistema de ecuaciones lineales, Los coeficientes de las variables o incég
nitas forman una matriz Hamada matriz de coeficientes del sistema, Los coeficientes,
Junto con los términos constantes, forman una matriz llamada matriz, aumentada del
sistema. Por ejemplo, la matriz de los coeficientes y la matriz aumentada del sistema de
jones lineales siguientes son:
mt oyt ye 2 ae) ee
203 4] bag
dx ++ x | P 3
2h
: u-1-3) I-12 -6
~ yy = -6
> matriz de coeicientes_matriz aumentada
Observe que 1a matriz de coeticiemtes es una submatriz de la matriz aumentada, La
‘matriz aumentada describe completamente el sistema.
Se pueden usar transformaciones Mamadas transformaciones elementales para
transformar un’ sistema de ecuaciones lineales en otro sistema de ecuaciones lineales
que tiene la misma solucién, Estas transformaciones se usan para resolver sistemas de
7
1.1 Matrices y sistemas de ecuaciones ineales 7
ecuaciones lineales mediante eliminacién de las variables. En la prictica es més facil
trabajar en términos de las matrices usando operaciones equivalentesllamadas operaciones
lementales en los renglones. No es necesario escribir las variables 1, xy. ¥y, en cada
paso. En las computadoras se escriben y se manipulan sistemas de ecuaciones ineales en
Términos de estas matrices, Estas transformaciones son las siguientes.
‘Transformaciones Operaciones elementales
elementales en los renglones
1, Intercambiar dos ecuaciones. 1. Intercambiar dos renglones de una matrz.
2, Multiplicar ambos lados de una ecua- 2. Multiplicar los elementos de un renglén
cin por una constante distinta de por una constante distinta de cero,
3, Sumar un méltiplo de una ecuacién 3. Sumar un maltiplo de Tos elementos de un
a otra ecuacién, rengldn a los elementos correspondientes
de otro renglén.
Las transformaciones elementales preservan Is solucién porque el orden de las ecuaciones
ro afecta a la soluciGn, multiplicar toda una ecuacién por una constante distinta de cero
no cambia la igualdad, y sumar cantidades iguales a ambos lados de una igualdad da
como resultado una igualdad.
‘A Jos sistemas de ecuaciones relacionados mediante transformaciones elementales.
¥ que por lo tanto tiene las mismas soluciones, se les llama sistemas equivatentes. El
Simbolo ~ se usa para indicar que dos sistemas de ecuaciones son equivalentes. El método
de climinacién de Gauss-Jordan usa transformaciones elementales para eliminar variables:
se puede usar el método porque cada sistema de ecuaciones tiene 1a misma solucién que el
sistema original, ustramos el método de eliminacién de Gauss-Jordan usando ecuaciones
Y al lado la realizacién andloga del método usando matrices en el ejemplo siguiente: FL
lector observard, en el lado izquierdo, Ia manera sistemitica en que se van eliminando
las variables de las ecuaciones. AL mismo tiempo observard, en el lado derecho, eémo
se hace esto en términos de matrices, creando ceros en ciertas posiciones. De aqui en
‘adelante seguiremos ef método usando matrices.
Resuelva el sistema de ecuaciones lineales siguiente
nt metus 2
2x $3 + y= 3
ny yy = 6
(Blicion
Método usando las ecuaciones | Método andlogo usando la matriz
Sistema inicial Matriz aumentada
mt yt as 2
rhe rt 3
2x t Bayt = 2313)
= 2x, = -6 1-1-2 -6)
2
Capitulo 1 Sistemas de ecuaciones lneales
Eliminamos x, de la 2a. y 3a. ecuaciones:
- nt nts 2
Ee? + (~2)Ee1 ny
Fe3+(-DBel 2x, = 34x, = -8
Eliminamos x, de la la. y 3a, ecuacio
+22 3
Fel + (“E27
Ec3 + (2)Be2 Sx, = -10
En la 3a, ecuacién convertimos en 1 el
coeficiente de x, (es decir, despejamos
ah
Hye 3
Hoye
¥/5)Ee3
ye
Eliminamos x, de la 1a. y 2a. ecuaciones:
Eel +(-2)E3 =
Fe? + Be3 n= 2
La solucién es x) = ~1, xy
La soluci6n es x, = —1, x,
Creamos ceros en ta columna I:
- bud
R2+C-IRI |g
RO (-DRI
Creamos los ceros correspondientes en la
columna 2:
102
RIC DRE) ror ot)
ROR [0 0-5-1)
Convertimos en 1 el elemento (3, 3) (es
decir, “normalizamos” el elemento):
or-t
loot
Creamos ceros en la columna 3
1/5)Be3
" =-t
Ixy = 2,
Geométricamente, cada una de las ecuaciones originales de este ejemplo representa un
plano en el espacio tridimensional. El hecho de que se tenga una sola solucién significa que
los tres planos se intersectan en un solo punto. La solucién (1, 1. 2) da las coordenadas
de este punto en el que se intersectan los tres planos. A continuacién damos otro ejemplo
para entender n
-jor el método.
Resuelva el siguiente sistema de ecuaciones lineales
xy 2x t4xy = 12
2x,
ay Sn, = 18
wry + 3x)- 34, = -8
1.1 Matrices y sstemas de ecuaciones Ines 9
BBSblucion
Empezamos con la matriz aumentada y usamos el primer rengl6n para crear ceros en
la primera columna. (Esto corresponde a usar la primera ecuacién para eliminar x, de
la segunda y tercera ecuaciones.)
1-2 41 - [2 4
2-1 518) R2+(-DRI 0 3-3-6
-1op-3-8) 0 R3ERI
Después, se multipica el rengl6n 2 por § para converiren 1 el elemento (3, 3). (Esto
corresponde a convertr en 1 el cocficente de x, de la segunda ecuacién.)
- faag
yee [0 dha
Ro
& oO 1 4
Se crean ceros en la segunda columna como sigue. (Esto corresponde a usar la segunda
ecuacién para eliminar x, de la primera y tercera ecuaciones.)
- 1023)
RI + ()R2 Jo -1 -2]
R3+(-DR2 [0 0 2 6)
Moltipticamos el renglén 3 por 4. (Esto corresponde a convertir en 1 el coeficiente de
15 dela tercera ecuacién,)
~ fio2a
1 jo 1-1-2
2)R3
& oo13
Por iltimo, creamos ceros en la tercera columna. (Esto corresponde a usar a tercera
ecuacién para eliminar x, de la primera y segunda ecuaciones.)
- 1003
RI+(-2)R3 Jo 1 0
R24 R3 joo 1 3
Esta matriz. coresponde al sistema
4 =2
=]
a3
La solucién es x, = 2,4) = Ly =3.
10 Capitulo 1 Sistemas de ecuaciones ineales
EI método de Gauss-Jordan para resolver sistemas de ecuaciones lineales usando
ices emplea la creacién de unos y ceros en ciertas posiciones de las matrices. Estos
ruimeros se erean de manera sistemitica, columna por columna. El ejemplo siguiente
muestra que algunas veces es necesario intercambiar dos renglones para poder proceder
como hemos explicado,
Bee oe cael site
4xy+ 8x5 12x, = 44
Bisolucion
Empezando con la matriz aumentada se procede como sigue, (Note el uso del cero en kt
‘atriz.aumentada como coeficiente de la variable que falta x,, en la tercera ecuacién. )
4 8-2 4 - fa ui]
13 6-8 3} ey 3 6-8 2
[-2 -1 0-7) 1 0-7
~ 12-3 4]
R2*(-3)RI |g 0 dat
RI+2R1 | 0 3-6 15,
Para continuar es necesario un elemento distinto de cero en ka posicisn (2, 2). Para
esto intercambiamos el segundo renglén con el tercer renglin (un renglin posterior) y
después continuamos,
~ flea . fi 2-3) |
0 3-6 is) , bias
R24 R3 ° G)R2 |
loo 1-1 : oo 1-4
- fiend ~ re
ki e(-DRo o 1-205 RI + (-1)R3 lo 1 0 3
La solusiines4y = 2.45 = 3g = 1
A continuacién se da una sintesis del método de Gauss-Jordan para resolver un sistem
de n ecuaciones con nm variables, que tiene una solucién tinica. La matriz aumentada
esté formada por la matriz A de coeficientes y por una matriz. columna, B, de téminos
1.1 Matrices y sistemas de ecuacioneslineales "1
constantes, Eseribiendo esta matriz. como [4:8]. Para transformar gradualmente esta
tmatriz, columna por columna, en una matriz (/,:X]. donde /, es la matriz identidad n
nn, se usan operaciones en tos renglones.
[apy se = :X1
‘A ta matriz fina (/,:X) se le Hama la forma escalonada reducida de la matriz aumentada
original. La matriz de coeficientes del sistema de ecuaciones final ex J, y X es a matr
columna de términos constantes. Esto implica que los elementos de X son la solucién
linica, Observe que [A:B] se ha transformado en [J,:X]. A se ha transformado en /,,
Por lo tanto
SiA sla matriz de coeficientes de un sistema de n ecuaciones con n variables que tiene
una solucidn Gna, entonces A es equivalente por renglones 2 J,
Si no se puede transformar [A:B] en [J,:X1. entonces el sistema de ecuaciones no tiene una
En la seceidn siguiente se dira mas acerea de tales sisten
soluciGn dnica
[ptuchos sistemas
En ciertas aplicaciones hay que resolver varios sistemas de ecuaciones lineales, todos
con la misma matriz A de coeficientes. Sean estos sistemas,
[AB I. | AByhe | AB)
Los términos constantes By, By. .... B, pueden ser, por ejemplo, datos de prueba. ¥ se
‘quiere saber qué soluciones Hevarian a estos resultados, Con frecuencia Ia situacién
indica que la solucién debe ser tinica. Por supuesto que uno puede seguir el método de
climinacién de Gauss-Jordan con cada uno de los sistemas, y resolver cada sistema de
manera independiente. Este procedimiento Hevaria a las formas escalonadas reducidas
Ugh UX os eid
y las soluciones serian X,, X. Se repetiria la misma reduccién de A a /,,con cada
Sistema: esto ocasionaria una gran cantidad de trabajo duplicado innecesariamente, Los
sistemas se pueden representar mediante una matriz aumentada [A:B, By“ B,]. y se puede
aplicar el método de Gauss-Jordan a esta nica matri2. Asf obtendrfamos
Web, By By) =
Jo que nos Hlevaria a la sotuciones X,. Xs.
Capitulo 1 Sistemas de ecuacones inales
Resuelva los siguientes tres sistemas de ecuaciones lineales, sistemas que tienen todos
a misma matriz de coeficientes.
a
xy- tx = fal fo a fol fg
By tty by peo Lilt 3) espectivamente
BiSolucion
Construimos la matriz aumentada que describe a los tres sistemas y encontramos la forma
escalonada como sigue.
3 8 0 3) ~ f=
fo 03
2-1 4 not 3 R2+(-2)R1 oon 1-3)
la a-a-in aq wert |p para 2
- fio rsid
aim 38
merce [oo 12
~ in oo 1
riers lo 1 0-1
R+2R3 0 1 2
Las soluciones de los tres sistemas de ecuaciones estin dadas por las tres tltimas columnas
de la forma escalonada reducida, Las soluciones son
En esta seccién se ha limitado el estudio a sistemas de n ecuaciones con n variables
y que tienen una solucién tinica. En la seccién siguiente extenderemos nuestro estudio del
meétodo de climinacién Gauss-Jordan a otros sistemas que tienen una solucién tnica, y
también a sistemas gue tienen muchas soluciones 0 ninguna solucién,
1.1 Matrices y sistemas de ecuacioneslneales B
Rea ete aes
1. Dé el tama de las matrices siguientes “0
123 fo 9
*@ Jor 2 mbes
453 -3 @
froaol 7
vo [P23 @ ly
lio] l4
“
129-8 7
we la 2s 72
4-6 4 0 ol
o
© b-34 7
#2, DE tos lementos (I, 1), 2. 3.2.4),
(6,2) de a sipuiente mate
®
nel
3. DE fos elementos (2, 3), ¢ 3.14 4 ee ee
(3,1) dela sigiente mati, fy) bbq 8a as
fiad 4 Stig st = 0
245
an 6 tnterprete fs matrices siguientes como matrices aumen-
5 oe tadas de sistemas de ecuaciones.Eseribadebajo de cada
6904 una el sistema de ecuaciones
4. Bsoriba la mati identidad 1,
5, Determine la matrz de cosficentesy ia mates aumen- p23 ho
@ “wy
tada correspondientes a los sistemas de ecuaciones lasd 64
siguientes.
t@) stage 7 wo fed
2x, - 5m = 3 50 2
0) Sx, 42m = ayy =
Sx + 2m = ayy as-d
ayt3n ton 4 62 4
30
8
“@) ls
4x, + 6x) — 9x, = 7 »
‘Las respuesas alos ejericios mareados con un asterisco sedan al final de libro,
ae
14 Capitulo 1 Sistemas de ecuacionesineales
6. continuacién,
-3 6 4
5-23)
240
fo-2 4
wo fs 7a)
|
12-1 4
amo 1 4. S|
io 1-3
7. En los ejrcicios siguientes se da una maiz seguida de
luna operacién elemental en los renglones. Determine
fen cada caso Ia maiz que se obtiene.
WR
oi
Rie?
He RI+RE
R3+(-2R1
oo RI + (-2)R2
R34 4R2
I o4 -
Me Jo p32) RE (aR:
foo a RO aR
1a 2 4 -
Mor s-3
lo 0-2 +
8, Interprete cada una de las siguientes operaciones en fos
renglones como un paso para obtener la forma escalo-
hada reducida de una matriz. «Por qué se escogieron
lus operaciones que se indican? ¢Cul es et objetivo
particular que se busea, en términos del sistema de
‘ecuaciones lineales que representan las matrices?
freaag ~
say 217 5)
400 ~36)
aa 4
bas
oats 1)
fea}. ;
los 6 gy :
os a8 ql
fase 0 fh aca
woo 6 :
90-2 6 gags 81 aw
bia lo 0-2 4
fre so]
tdi j0 1 2 3} RE + (= 2)R2
lo-sn-a} R34 ape
bod ¢
| ! |
oa
oo au
9. Interprete cada una de las siguientes operaciones en fos
Fenglones como un puso para obtener fa forma escalor
nada reducida de una matte. «Por qué se ese
estas operaciones?
Fo 24 - roa
way lo 1-1 a} RE*C-20R3 fo 105)
oo 1 RRS foot}
; ;
pred 2 fad
o > =x D>
yd? Rier2 | 2404
s-7 12 Is-71 2
ox . fros a
; |
tat py fora 2
n26 loo 1-3]
j= fioo-a|
wo xa} RIOR oto 5}
loo 1a] R2+1-RI Lo 0 1-3)
1.1 Matrices y sistemas de ecvacioneslneales 15
10. Todos los sistemas de ecuaciones siguientes tienen
tuna solucién dnica. Resuelva estos sistemas usando el
rétodo de eliminacién de Gauss-Jordan
Ma) 2m = 8
2xy-3xy = “11
() 2x, 42x) = 4
Bx 42 = 3
On tye B
2ey- 2x, = 4
nods 5
@ x4 tin = 6
9
Qe + yt 6x = IN
ay t 2x tary
He) oy tan = 3
Bay ay tay = 2
Bx ty 2
© ont y- ye
Bt Qt y= 10
4n 42x 435 = 4
11. Todos tos sistemas de ecusciones siguientes tienen
una solucién nica. Resuelva estos sistemas usando el
método de eliminaci6n de Gauss-lordan.
a gta = 8
dnt? = 6
yt nt nes
ox
ay $x + 10x, = 21
2x, -3q- Sy = =
~2xy- 4x, = -9
"O x t2yt3y = M4
2x, + Sx 48x, = 36
xn oe =-4
@ > ye
2x, +6x, + 10x, = It
en
Qyt yt Gy = 9
*@) 2x) t 2-44 = 14
Bet nt ye 8
2x, — y+ 2ay = -1
12, Los siguientes ejercicios incluyen muchos sistemas de
ecuaciones lineales con solucién Ginica, que tienen ta
misma matriz de coeficientes. Resuelva los sistemas
‘empleando el método de eliminacién de Gauss-Jordan
42 una gran matriz aumentada que describa varios sis-
Dod FB = 1S
ay t Tay = xy = 45
ds HS
Hb) 3x) — 6x = 15x
ntiet ins 4d
m2 bao Fay
(©) 3x, 46% -ay = 3
ny t3xy- 4, = 12
Ayr ttl 8B
2x; + 3x, 8
s@) + 2x + 2x, + Say
2x, + 4x, + 2x, 48x = 14
xy t 3x, tay H Bey = 19
yo mtn = 2
te nt tlt bye
2x; + 3x, 46x) + 19%, = 36
Bx, + 4x, 41S, = 28
7 Oy = 2
13, En los ejercicios siguientes se tienen muchos sistemas
de ecuaciones lineales con solucién tnica y una misma
rmatriz de coeficientes, Resuelva los sistemas aplicando
el método de eliminacién de Gauss-Jordan a una matriz
aumentada grande que deseriba a todos los sistemas.
16 Capitulo 1 Sistemas de ecuacioneslineales
13, continuaciGn 0) x)= 2x, 43x = by
a) Qt 2 = dy
2a, = 34 + 6%
fal [> {4
ole seperate ova | = | sh
by
) x + 2xy
Bx #5xy = Py
3] respectivamente
ot mh
2x, +34, = by
mt) Blm—
ia
espectivamente
Eliminacién de Gauss-Jordan
En Ia seccién anterior usamos el método de eliminacién de Gauss-Jordan para resolver
sistemas de n ecuaciones con n variables que ten‘an una solucién tinica. Ahora estudiaremos
el método de una manera mds gencral, el niimero de ecuaciones puede scr distinto del
numero de variables y puede haber una solucién nica, muchas soluciones 0 ninguna
solucién. Una vex més, empezaremos con la matriz aumentada del sistema dado. y
Hevaremos a cabo una serie de operaciones elementales en los renglones que darn como
resultado una matriz mas simple (la forma escalonada reducida), que nos conducitd
directamemte a la solucién,
Daremos la definicién general de la forma escalonada reducida. El lector puede
observar que la forma escalonada reducida tratada en secciones anteriores, conforman
esta definicién,
DEFINICION Una matriz. esta en forma escalonada reducida si
1. Todo renglén que conste tnicamente de ceros esté en la parte inferior de la max
wiz,
i 2. Bl primer elemento distinto de cero en cada uno de los otros renglones es 1. A este
elemento se le llama I principal.
3. BI principal en cada uno de los renglones, después del primer renglén, se encuentra
@ la derecha de los | principales de los renglones anteriores.
4, Todos los demés elementos en una columna que contiene un 1 principal, son cero.
1.2. Eliminacion de Gauss-Jordan 7
Las siguientes matrices estin en forma escalonada reducida,
ros] [room fisod frase
012} loroa looro |ooo1
loool loo19 = =oo01 § joood
rosoos} fi2z0304
017009) 001207
000105, joooors
000014 looooaa
Las siguientes matrices no estén en forma escalonada reducida,
1204) 12030 1002] 1708|
joo00) oo 340 joord 0103)
0013) ooo0L 0103) oo 12)
0000)
tun engin de enelrenglén 2.c1 ent renglin 3el_ sobre el
ceeros que no esté —primerclemento I principal no esté principal del
cena parte inferior distinto de cero aladerecha del 1 renglin 2 hay un
‘de la matriz noesun | principal elemento distinto
del renglén 2 de cero
Hay diferentes secuencias de operaciones en los renglones que pueden usarse para
transformar una matriz dada en la forma escalonada reducida —sin embargo. todas
ellas Hlevan a Ia misma forma escalonada reducida—. Se dice que la forma escalonada
reducida de una matriz es nica. El método de eliminacién de Gauss-Jordan es un método
sistemético importante (Ilamado un algoritmo) para llegar a la forma escalonada reducida,
Este método se puede programar en una computadora. Ahora damos el método resumido
yy después, un ejemplo de aplicacién.
Eliminacién de Gauss-Jordan
1, Escribir la matriz. aumentada del sistema de ecuaciones lineales.
2. A partir de la matriz aumentada y usando operaciones elementales en Ios renglones,
obtener Ia forma escalonada reducida, Esto se leva a cabo creando, columna por
columna, empezando con la primera columna, los unos principales, y después los
ceros sobre y debajo de cada uno principal.
3. Eseribir el sistema de ecuaciones correspondiente a la forma escalonada reducida,
Este sistema da la solucin,
‘Se hace énfasis en Ja importancia de dominar este algoritmo. No s6lo es importante
obtener la solucién correcta, el método para llegar a la solucién es también importante.
Interesa, por ejemplo, laeficiencia de este algoritmo (el niimero de sumas y multiplicaciones
‘que se usan) y compararlo con otros algoritmos que pueden usarse para resolver sistemas
de ecuaciones.
18 Capitulo 1 Sistemas de ecvaciones lineales
0 0 2-2 2
33-3 912
Gana
BBSBlucion
Paso Si es necesario, intercambiar renglones para llevar un elemento distinto de cero
la parte superior de la primera columna distinta de cero, A este elemento distinto de
cero se le Hama pivote.
~ fore og
Rl R2 00 2-22
la ang
Paso 2 Crear un | en la posicién del pivote, multiplicando el renglén del pivote por
H
woe
~- 11-1 3 4]
qe 0 9 2-2 2
* 4 4-2 1
Paso 3 Crear ceros en todas las dems posiciones de la columna pivote, sumando
miltiplos adecuados del renglén pivote a todos los dems renglones de la matriz,
. bias |
0 0 2-2 2
w+ (-#9R1
secon PT]
Paso 4 Cubrir el renglén pivote y todos los renglones arriba de él. Repetir los pasos 1
y 2.con la parte restante de la matriz. Repetir el paso 3 en toda la matriz. Continuar hasta
alcanzar fa forma escalonada reducida,
[ecumenical Lat
0 0 2-2 2) ~ 0 0
fo 0 2-1-4 oo
phowe
primera columna distinc
de cero dea submatri2
- ri-13 4
oo 1-r 1
lo 0 2-1 ~4)
1.2 lminacion de Gauss-Jordan 19
- LAlpo 25
RI+R2 OcOeb -1 1
R3+(-2)R2_ [0 0 0 Pe
pivote
~ fi. o on
RI+(-2)R3 lo 0 1 0-5
R2+R3 [0 0 0 1-6
La matria resultante es de la forma escalonada reducida para la matriz dada,
Ahora vea cémo se usa este método para resolver distintos sistemas de ecuaciones. El
ejemplo siguiente ilustra cmo resolver un sistema de ecuaciones lineales que tiene muchas.
soluciones. Se obtiene la forma escalonada reducida, Después, es necesario interpretar la
forma escalonada reducida, expresando las distintas soluciones obteni
ot
BBBalcion
‘Se empieza con la matriz aumentada y se aplica el algoritmo de Gauss-Jordan. Los pivotes
¥ los unos principales estén encerrados en citculos.
@-3 39 =
zal 4g ri
3-5-1 7
= r-1 13 - it 034
recor fo @ 2) RIFR2 fo 121
R3+(-3)R1 fo -2 -4-2] 3 4¥2R2 |o 0 0
‘Se llega a la forma escalonada reducida. El sistema de ecuaciones correspondiente es
“ tn, sh
ny tea ?
ntmmei ol wy
20 Capitulo 1
Hay muchos valores para x), y x, que satisfacen al sistema de ecuaciones. Este es un
sistema de ecuaciones que tiene muchas soluciones. A x se le Hlama variable principal
de la primera ecuacidn y x, es la variable principal de la segunda ecuacién. Para expresar
las diversas soluciones, se escriben la s variables principales de cada ecuacién en términos
de las variables restantes, Asi se tiene que:
3x, +4
ny = 72a +1
Se le asigna a x, un valor arbitrario r. La solucién general del si
tema es
ays Br $4 = Wt haya
Como r puede ser cualquier niimero real, se obtienen muchas soluciones. Se dice que r
es un parmetro. Déndole distintos valores a r se pueden obtener soluciones especttficas.
Por ejemplo,
parar= 1, setiene x, = 1, 4) =e
parar= 2, setiene x, = 10,x,= 5,
3 Resuelva el sistema de ecuaciones
2x) ~ 4x + 12x, - 10x, =
+ 2x)
Bx, t Qny = 14
2x 4a + 9x Ory = 44
MBBBucion
Empezando con la matriz. aumentada se obtiene
@-4 12-10 si ~ @-2 6-5 2
“12-3 2-14) yg, f= 2-3: 2-14
2-4 9 -6 44) 2 2-4 9-6 44
~ 1-2 6-5 29) = [1-2 6-s 29]
+RI - -
R2+R 9 0@-3 15) pp [0 9 D-1 5
R3+(-2R1 [9 0-3 4-14) 0 0-3 4-14)
~ 1-2 0 1-1) ~ 1-2 0 0-3
Ri+(-6R2 fo oO 1-1 3} RE+CDRS |p 0 1 0 6)
R3+()R2 lo o 0 1 4 R2+R3 [0 O01 1
1.2. Eliminacion de Gauss-loedan 2
Fsta es la forma escalonada reducida, El sistema de ecuaciones correspondiente es
xy 72% =-2
5 = 6
X
Hay muchas soluciones. Una vez. més escribiendo la variable principal en términos de
las variables restantes se obtiene
ape 2g 2 Haye!
Asignando ax, el valor arbitrario r. La solucién general es
ig 2
= ny 6K= 1
Dindole a r diversos valores se pueden obtener soluciones especificas.
LO 4 Este ejemplo ilustra que en algdn paso puede ser necesario intercambiar renglones
Resuelva el sistema de ecuaciones,
apt dx — at Sey t ts =
2x + 4g
4
o
4 + 64y + 385 =
Hdryt ay~ yt 35 =
WBRicion
‘Aplicando el algoritmo de Gauss-Jordan se obtiene
2 ~ para
6 R2+(-2R1 Jo 0 0 0 1 2
4 +R fo 0 0@4 6
~ - 12-1313
R2ER3 ge °° 923
joo 0012
- 12-1 0-5 -7| ~ 12-1 00 3)
oo 0123 Ri+sR3 |g 0 0 1 0-1
Ri + (—3)R2
o oo 0 O@ 2 R2+(-2)R3 [0 0 O Of
22 Capitule 1 Sistemas de ecuacioneslineales
Se tiene la forma escalonada reducida. El sistema de ecuaciones correspondiente es
ay + 2x) = xy =
x 1
7
Expresando las variables principales en términos de las vatiables restantes se ob:
tiene
2 by $3,
Dando los valores arbitrarios r a.x, y s a x,, La solucién general es
Wt st3,
5 Este ejemplo ilustra un sistema que no tiene solucisin. Tratemos de resolver el sistema
ayo xy t2ky
2x, ~2xytSey = 4
xy t2n- x = -3
2x +2, = 1
WiSolucion
Partiendo de Ja matriz aumentada se obtiene
M-1 2 j ~
iS ; s) R24 CRI
TES rae (oer
bia Beco
R2ORS
G)R2
12. Eliminacisn de Gauss-loedan 23
~ rod
lo 1-1-2]
Ri+R2
Ré+(-2)R2 0 9 O-2
oo 45
- 100 3
RI+(-DR3 /y 1 9 —a)
R2+R3 Jo o 1-2]
R4+(~4)R3 [oo oa
100 3)
- 0 1 0-4
GIR4 fo 0 1-2
jo 0 0
Esta matriz. atin no esté en ta forma escalonada reducida; todavia hay que crear ceros
sobre el I del tltimo renglén. Sin embargo, en situaciones como éstas, en las que en una
‘matriz el tltimo renglén que no consta dnicamente de ceros es de la forma (0.0: 01), no
hay necesidad de seguir adelante. El sistema no tiene soluciGn. Para ver esto escribamos
Ia ecuacién que corresponde al tiltimo renglén de la matriz,
Ox, + Or, + Ox,
No hay valores para xy, x; y x5 que satisfagan esta ecuacién. El sistema de ecuaciones
no tiene solucién.
[Bétemas homogéneos de ecuaciones lineales
Se dice que un sistema de ecuaciones es homogéneo si todos los términos constantes
son cero. Conforme avancemos en el curso vamos a ver que los sistemas homogéneos
de ecuaciones lineales tienen muchas propiedades importantes y tienen un papel clave
cn este estudio,
EI siguiente sistema de ecuaciones es un sistema homogéneo de ecuaciones Tineales
xy #2ay~ Sy = 0
2x, — 3x, + 6x, = 0
Observe que x, = 0, x, = 0.x, = 0 es una solucién de este sistema. Es claro que esto
es cierto para Cualquier sistema homogéneo de ecuaciones.
You might also like
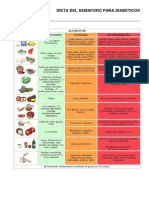
- Diabetes. Dieta Del SemaforoDocument1 pageDiabetes. Dieta Del SemaforoFelipe Javier Ruiz Rivera100% (2)
- Maestria en Sistemas EmbebidosDocument372 pagesMaestria en Sistemas EmbebidosFelipe Javier Ruiz Rivera100% (1)
- Optimizacion Matematica Con R Volumen IDocument161 pagesOptimizacion Matematica Con R Volumen IFelipe Javier Ruiz RiveraNo ratings yet
- MORALES ALQUICIRA ANDRES Introduccion Al Algebra Lineal y deDocument325 pagesMORALES ALQUICIRA ANDRES Introduccion Al Algebra Lineal y deFelipe Javier Ruiz RiveraNo ratings yet
- Comercio ElectronicoDocument278 pagesComercio ElectronicoFelipe Javier Ruiz RiveraNo ratings yet
- Matematicas I Algebra LinealDocument0 pagesMatematicas I Algebra LinealFelipe Javier Ruiz RiveraNo ratings yet
- Glosario de La ComplejidadDocument75 pagesGlosario de La ComplejidadFelipe Javier Ruiz Rivera100% (1)