You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ION-M Master User ManualDocument100 pagesION-M Master User Manualacouch88No ratings yet
- An Eye For An Eye: A Single Camera Gaze-Replacement MethodDocument8 pagesAn Eye For An Eye: A Single Camera Gaze-Replacement MethodAshitha EdisonNo ratings yet
- Efficient Joint 2D and 3D Palmprint Matching With Alignment RefinementDocument7 pagesEfficient Joint 2D and 3D Palmprint Matching With Alignment RefinementAshitha EdisonNo ratings yet
- 409983Document81 pages409983Ashitha EdisonNo ratings yet
- Multidimensional MUSIC DOA Estimation Using Ant Colony Optimization AlgorithmDocument4 pagesMultidimensional MUSIC DOA Estimation Using Ant Colony Optimization AlgorithmAshitha EdisonNo ratings yet
- HJGHJGDocument205 pagesHJGHJGtrsghstrhsNo ratings yet
- BQ 25185Document32 pagesBQ 25185nomimak.mobileNo ratings yet
- BOQ SpecsDocument38 pagesBOQ SpecsSubodh KhandekarNo ratings yet
- Technical Speci Cation: Product SpecificationDocument2 pagesTechnical Speci Cation: Product SpecificationMiguel GarzaNo ratings yet
- PPT10-super and UltracapacitorDocument22 pagesPPT10-super and UltracapacitorChaudhari Jainish100% (1)
- Floor Heating Controls Wiring Instructions For Ba ControlsDocument12 pagesFloor Heating Controls Wiring Instructions For Ba Controlsjamppajoo2No ratings yet
- August Smart Door LockDocument6 pagesAugust Smart Door LockaswaniNo ratings yet
- Operating System Project 4Document7 pagesOperating System Project 4Nihar DongaraNo ratings yet
- 2100 In012 - en PDocument128 pages2100 In012 - en PAlvaro CastilloNo ratings yet
- Sprint 350Document2 pagesSprint 350Joyan FernandesNo ratings yet
- Length Cutting Detector SensorDocument8 pagesLength Cutting Detector Sensoraks5884No ratings yet
- FMR51Document110 pagesFMR51Shishir JhaNo ratings yet
- Vienna Instruments PRO Manual English v2.71Document66 pagesVienna Instruments PRO Manual English v2.71iantraderNo ratings yet
- Joysticks Series CJDocument6 pagesJoysticks Series CJFolkwin LapNo ratings yet
- CS1Bh Lecture Note 7 Compilation I: Java Byte CodeDocument8 pagesCS1Bh Lecture Note 7 Compilation I: Java Byte CodeAnkur GuptaNo ratings yet
- Lc4.3e Ab 312278515352Document131 pagesLc4.3e Ab 312278515352berndstadlerNo ratings yet
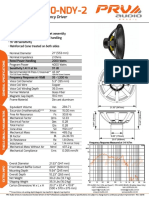
- 21SW4000-NDY-2: Professional Low Frequency DriverDocument1 page21SW4000-NDY-2: Professional Low Frequency DriverChrisNo ratings yet
- Variable Speed Drives Altivar 31 Programming Manual (English)Document78 pagesVariable Speed Drives Altivar 31 Programming Manual (English)alfan maulanaNo ratings yet
- Ex60-5 Elec (E)Document1 pageEx60-5 Elec (E)Canhoto100% (1)
- User Manual: Allen-BradleyDocument117 pagesUser Manual: Allen-BradleyOleg YaniNo ratings yet
- Business ProposalDocument2 pagesBusiness ProposalGelber E ElisangelaNo ratings yet
- Ba3240 PDFDocument11 pagesBa3240 PDFJoe Jairo Huillca HerreraNo ratings yet
- Design and Analysis of Hybrid Stepper MotorDocument16 pagesDesign and Analysis of Hybrid Stepper MotorARVIND100% (2)
- Orion Electronics Ltd. GPS Technical Reference GuideDocument142 pagesOrion Electronics Ltd. GPS Technical Reference GuidejimdigrizNo ratings yet
- Ssimplex: 4100 Fire Alarm Annunciator and Miniplex Transponder ProgrammingDocument42 pagesSsimplex: 4100 Fire Alarm Annunciator and Miniplex Transponder ProgrammingEng M ElseaidyNo ratings yet
- Electric DiagramsDocument72 pagesElectric DiagramsIgnacio Alejandro Jose Helo Varela100% (1)
- D64Rp18 Series B1 Digital Ground Fault Relay D64Rp18 Instruction ManualDocument17 pagesD64Rp18 Series B1 Digital Ground Fault Relay D64Rp18 Instruction ManualCarlosNo ratings yet
- NetatmoDocument48 pagesNetatmoJuli SánchezNo ratings yet
- Backtrack 3 WEP TutorialDocument7 pagesBacktrack 3 WEP TutorialSorin-Adrian LearschiNo ratings yet