Professional Documents
Culture Documents
Baka Lark A Final
Uploaded by
rutkiskaccsaOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Baka Lark A Final
Uploaded by
rutkiskaccsaCopyright:
Available Formats
MASARYKOVA UNIVERZITA
PR
RODOVE
DECKA
FAKULTA
U
STAV MATEMATIKY A STATISTIKY
Bakalarska prace
BRNO 2013 ANNA PENIAS
KOVA
MASARYKOVA UNIVERZITA
PR
RODOVE
DECKA
FAKULTA
U
STAV MATEMATIKY A STATISTIKY
Model draveckorist
s funkcn odpoved
Hollingova II. typu
Bakala rska pra ce
Anna Peniaskova
Vedouc prace: RNDr. Lenka Pribylova, Ph. D. Brno 2013
Bibliogracky zaznam
Autor: Anna Peniaskova
Pr rodovedecka fakulta, Masarykova univerzita
U
stav matematiky a statistiky
Nazev prace: Model draveckorist s funkcn odpoved Hollingova
II. typu
Studijn program: Matematika
Studijn obor: Statistika a analy za dat
Vedouc prace: RNDr. Lenka Pribylova , Ph. D.
Akademicky rok: 2012/2013
Pocet stran: xi +39
Klcova slova: Model draveckorist; Populacn dynamika; Hollingova
funkcn odpoved
II. typu; Hopfova bifurkace; Transkri-
ticka bifurkace; Paradox dostatku; Loka ln stabilita
Bibliogracky zaznam
Autor: Anna Peniaskova
Pr rodovedecka fakulta, Masarykova univerzita
U
stav matematiky a statistiky
Nazov prace: Model draveckorist s funkcnou odpoved
ou
Hollingovho II. typu
S
tudijny program: Matematika
S
tudijny odbor: S
tatistika a analy za da t
Vedu ci prace: RNDr. Lenka Pribylova , Ph. D.
Akademicky rok: 2012/2013
Pocet stran: xi +39
Kl
u cove slova: Model draveckorist; Populacna dynamika; Hollingova
funkcna odpoved
II.typu; Hopfova bifurka cia; Transkri-
ticka bifurka cia; Paradox dostatku; Loka lna stabilita
Bibliographic Entry
Author: Anna Peniaskova
Faculty of Science, Masaryk University
Department of Mathematics and Statistics
Title of Thesis: Preypredator model with Holling type II functional
response
Degree Programme: Mathematics
Field of Study: Statistics and Data Analysis
Supervisor: RNDr. Lenka Pribylova , Ph. D.
Academic Year: 2012/2013
Number of Pages: xi +39
Keywords: Predatorprey Model; Population Dynamics; Hollings
II. type Functional Response; Hopf Bifurcation; Transcri-
tical Bifurcation; Paradox of Enrichment, Local Stability
Abstrakt
V teto bakala rske pra ci se venujeme analy ze modelu draveckorist s funkcn
odpoved Hollingova II. typu, zna memu jako Rosenzweigu vMacArthuru v mo-
del. Analy za modelu probehla v za vislosti na zvolenemparametru m ry u mrtnosti
dravcu . Podarilo se na m naj t analo gii paradoxu dostatku pre tento parameter,
kterou jsme nazvali paradoxem za niku.
Abstrakt
Vtejto bakala rskej pra ci sa venujeme analy ze modeludraveckorists funkcnou
odpoved
ou Hollingovho II. typu, zna memu ako RosenzweigovMacArthurov
model. Analy za modelu prebehla v za vislosti na zvolenom parametri miery u -
mrtnosti dravcov. Nasli sme analo giu paradoxu dostatku pre tento parameter. Jav
sme nazvali ako paradox za niku.
Abstract
In this thesis we study RosenzweigMacArthur predatorprey model with
Hollings type II functional response. We have analyzed the local qualitative be-
haviour of the model with respect to the death rate of the predator. An interesting
phenomenon has appeared, the paradox of extinction, as an analogy to paradox
of enrichment.
Pod
akovanie
Na tomto mieste chcem pod
akovat vedu cej bakala rskej pra ce RNDr. Lenke
Pribylovej Ph. D. za mnozstvo casu, ktore mi venovala pri zodpovedan ota zok
spojeny ch s bakala rskou pra cou, za jej odborne vedenie, pripomienky, na vrhy a
trpezlivost. Moja vd
aka patr aj mojej rodine a priatel
om za ich mora lnu podporu.
Prohlasen
Prohlasuji, ze jsem svoji bakala rskou pra ci vypracovala samostatne s vyuzit m
informacn ch zdroju , ktere jsou v pra ci citova ny.
Brno 23. kvetna 2013 . . . . . . . . . . . . . . . . . . . . . . . . . .
Anna Peniaskova
Obsah
U
vod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
Kapitola 1. Spojite dynamicke systemy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Dynamicke systemy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Invariantne mnoziny dynamicky ch systemov . . . . . . . . . . . . . . . . . 2
1.3 System diferencia lnych rovn c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Linea rny system diferencia lnych rovn c . . . . . . . . . . . . . . . . . . 4
1.3.2 Klasika cia hyperbolickeho rovnova zneho
bodu v rovine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Loka lne bifurka cie nelinea rnych spojity ch
systemov v rovine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4.1 Jednoparametricke loka lne bifurka cie spojity ch
nelinea rnych systemov v rovine . . . . . . . . . . . . . . . . . . . . . . . . 8
Kapitola 2. Modely populacnej dynamiky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1 Populacna rovnica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Modely jednodruhovy ch popula ci . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Malthusov model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Model s logisticky m rastom . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Dvojdruhovy system typu draveckorist:
LotkovVolterrov system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Zjednodusuju ce predpoklady . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.2 LotkovVolterrov model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Hollingove typy funkcny ch odpoved preda cie . . . . . . . . . . . . . . . . 21
2.4.1 Hollingova rovnica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4.2 Typy funkcny ch odpoved . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5 Modika cie Volterrovho systemu . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Kapitola 3. RosenzweigovMacArthurov model draveckorist . . . . . . . . . . . . 24
3.1 Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Za kladna analy za systemu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.1 Nulkl ny systemu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.2 Rovnova zne body systemu . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 Bifurkacna analy za systemu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
viii
3.3.1 Transkriticka bifurka cia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3.2 Hopfova bifurka cia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Paradox dostatku a paradox za niku . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.1 Paradox dostatku . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.2 Analo gia paradoxu dostatku . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Zaver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Zoznam pouzitej literatu ry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
U
vod
Matematicke modelovanie sa zaobera modelovan m rea lnych procesov. Mate-
maticky mo zeme modelovat ako fyzika lne a biologickoekologicke javy, tak aj
chemicke reakcie alebo ekonomicke procesy. Modelovanie s rozvojom vy poctovej
techniky z skava sta le vacsie vyuzitie. Svedc o tom aj skutocnost, ze pomocou
matematicky ch modelov sa zacali vysvetl
ovat nasta vaju ce javy v spolocensky ch
veda ch ako psycholo gia alebo sociolo gia. Behom casu sa meniace deterministicke
systemy mo zeme modelovatdiferencia lnymi rovnicami.
Modely popisuju ce vy voj popula ci zivoc chov alebo l
ud sa nazy vaju populacne
modely. Uz od objavenia sa prvy ch taky ch modelov (napr. Malthusov model) je
im venovana vel
ka pozornost, vel
a vy skumov a obrovske mnozstvo vedeckej li-
teratu ry. Vysvetlovatto mo zeme ty m, ze je ich pomerne jednoduche otestovat:
sledovatpopula cie zivoc chov (v modeloch draveckoristsu casto pouz vane per-
loocky a riasy) pri laborato rnych podmienkach a spra vanie sa systemu porovnat
s predikciami modelu. Populacne modely vyvola vaju pozornost aj kvo li tomu,
ze l
udstvo si viac uvedomuje hroziacu ekologicku katastrofu a dba o na sledky
svojho rozhodovania. Je vel
a smutny ch pr kladov, kedy t , ktor mali v ruka ch
rozhodnutie, nevypoculi ekolo gov a matematikov a ich predikcie o negat vnych,
casto neodvra titel
ny ch na sledkoch daneho rozhodnutia.
Ta to pra ca je venovana populacnemu modelu interakcie draveckorists Hollingo-
vou funkcnou odpoved
ou preda cie typu II. Model je zna my pod menom Rosen-
zweigovMacArthurov model draveckorist. Tento dvojdimenziona lny system
vykazuje necakane spra vanie sa, na ktore upozornil Rosenzweig a jav pomenoval
ako paradox dostatku (paradox of enrichment), kedy do jde pri zvy sen kapacity
prostredia k za niku popula ci . Ta to pra ca sa bude venovatanaly ze toho modelu a
za vislosti dynamiky na inom parametru, na miere u mrtnosti preda tora. Na jdeme
analo giu paradoxu dostatku pre tento parameter systemu. Z tohoto pohl
adu je
pra ca autorska .
Pra ca je rozdelena do troch kapitol. Prva kapitola je venovana teo rii ty kaju cej
sa spojity ch dynamicky ch systemov a jednoparametricky ch loka lnych bifurka ci ,
ktoru pri vysetrovan vlastnost systemu vyuz vame. Vpra ci su popisovane len tie
jednoparametricke loka lne bifurka cie, ktore sa odohra vaju v Rosenzweigovom
MacArthurovom modeli. V druhej kapitole su vysvetlene niektore pojmy ty kaju ce
sa populacny chmodelov a je podany strucny prehl
ado vy voji samotneho modelo-
x
U
vod xi
vania popula ci . V tretej kapitole je vykonana samotna analy za Rosenzweigovho
MacArthurovhomodeludraveckorist. Je vysetrena stabilita rovnova znychbodov
a bifurka cie, ktore sa odohra vaju pri zmene hodnoty parametra. Za parameter je
zvolena miera u mrtnosti dravcov, ako uz to bolo spom nane. Boli sme zvedav , ci
sa odohra va jav podobny paradoxu dostatku aj pre tento parameter. Zistili sme,
ze taky to jav nastane a nazvali sme ho paradoxom za niku.
Pre vy pocty potrebne k analy ze systemu je pouzity vy poctovy matematicky soft-
ver Maple. Fa zove portrety a bifurkacne diagramy su vykreslene v programe XPP
a AUTO a na sledne gracky upravene v grackom editore CorelDRAW.
Kapitola 1
Spojite dynamicke systemy
1.1 Dynamicke systemy
Existuju systemy modeluju ce ro zne javy (biologicke, fyzika lne, chemicke, eko-
logicke), ktory ch vy voj v budu cnosti a spra vanie sa v minulosti je mozne urcit
na za klade pociatocneho stavu a za konov, ktory mi sa vy voj daneho systemu riadi.
Ked
sa za kony casom nemenia, hovor me o deterministickych dynamickych syste-
moch. Deterministicky dynamicky system je jednoznacne urceny jeho stavovym
priestorom, mnozinou casu a za konmi vy voja systemu.
1.1.1 Dencia. Stavovy priestor (fazovy priestor) dynamickeho systemu je mnozina
vsetky ch mozny ch stavov, ktore system nadobu da v case.
Podl
a toho, ci sa system vyv ja plynule alebo po krokoch, rozl sime dva pr pady
dynamicky ch systemov. Ked
mnozina casu T = R, hovor me o spojitom dynamic-
kom systeme. Ked
T = Z, hovor me o diskretnom dynamickom systeme.
1.1.2 Dencia. Evolucny operator systemu je zobrazenie
t
: X X na stavovom
priestore X pre dane t T, ktore pociatocny stav x
0
X transformuje na stav
x
t
X v case t: x
t
=
t
x
0
.
Poznamka (Vlastnosti evolucny ch opera torov). Evolucne opera tory maju nasledu-
ju ce dve za kladne vlastnosti:
0
= id, (1.1)
t+s
=
t
s
. (1.2)
Prva vlastnost 1.1 zarucuje, ze system nemen svoj stav sponta nne. Po uplynut
casu t = 0 system zostane v po vodnom stave. Systemy spl
n aju ce vlastnost1.2 su
autonomne systemy. Ich vy voj neza vis od casu t.
Ked
zna zorn me spra vanie sa dynamickeho systemu v case, jeho stavovy priestor
pripom na pru dtecu cej vody. Aj kvo li tej podobnosti triedyevolucny chopera torov
_
t
_
tT
spojiteho dynamickeho systemu nazy vame tok (ow).
1
Kapitola 1. Spojite dynamicke systemy 2
1.1.3 Dencia. Dynamicky system je trojica
_
T, X,
t
_
, s mnozinou casu T, stavo-
vy m priestorom X a s triedou evolucny ch opera torov
t
: X X s parametrom
t T, kde evolucny opera tor ma vlastnosti 1.1 a 1.2.
1.1.4 Dencia. Trajektoria (orbita) vycha dzaju ca z bodu x
0
je usporiadana pod-
mnozina stavoveho priestoru X:
Or(x
0
) =
_
x X : x =
t
x
0
, pre v setky t T tak, ze
t
x
0
je de f inovan y
_
Trajekto rie spojity ch dynamicky ch systemov su krivky, ktore zachytia zmenu x
so zmenou casu. Trajekto rie spolocne tvoria fazovy portret dynamickeho systemu
na stavovom priestore X. Z fa zoveho portretu dostaneme predstavu o kvali-
tat vnych vlastnostiach systemu, o pr tomnosti rovnova znych bodov, atraktorov
a cyklov.
1.1.5 Dencia. Bod x
X je rovnovaznym(pevnym) bodomsystemu, ak
t
x
= x
pre vsetky t T.
1.1.6 Dencia. Cyklus je periodicka orbita, oznacme ako L
0
, kde pre kazdy bod
x
0
L
0
plat
t+T
0
x
0
=
t
x
0
pre nejake T
0
> 0, pre vsetky t T. Najmensie
take T
0
je perio da cyklu L
0
. Cyklus spojiteho dynamickeho systemu, v ktorej okol
neexistuje ziadny d
als cyklus, je limitnym cyklom systemu.
1.2 Invariantne mnoziny dynamicky ch systemov
1.2.1 Dencia. Invariantna mnozina dynamickeho systemu
_
T, X,
t
_
je taka pod-
mnozina stavoveho priestoru S X, kde ak x
0
S, potom
t
x
0
S pre vsetky
t T.
Evolucny opera tor
t
na stavovom priestore X vieme zu zitna invariantnu mnozi-
nu S a d
alej pracovatso systemom
_
T, S,
t
_
, kde
t
je zobrazenie na mnozine S.
Z den cie vyply va, ze kazda orbita je invariantnou mnozinou. Ak na invariant-
nej mnozine existuje nejaka metrika, hovor me o uzavretej invariantnej mnozine.
Rovnova zne body a cykly su uzavrety mi invariantny mi mnozinami.
1.2.2 Dencia (Stabilna uzavreta invariantna mnozina). Majme dynamicky sys-
tem
_
T, X,
t
_
s u plny m metricky m stavovy m priestorom X a s uzavretou inva-
riantnou podmnozinou S
0
X. Podmnozina S
0
je:
Ljapunovsky stabilna, ak pre l
ubovol
ne male okolie U S
0
existuje okolie
V S
0
tak, ze
t
x U pre vsetky x V a vsetky t > 0.
Asymptoticky stabilna, ak pre okolie U S
0
plat , ze
t
x S
0
pre vsetky
x U, pri t .
Kapitola 1. Spojite dynamicke systemy 3
1.3 System diferencialnych rovnc
Spra vanie sa dynamicky ch systemov popisujeme pomocou diferencia lnych rov-
n c. Stavovy priestor systemu je X = R
n
a za kony vy voju su funkcie f
i
:
x
i
= f
i
(x
1
, x
2
, . . . , x
n
), i = 1, 2, . . . , n
alebo vo vektorovom tvare
x
= f(x), (1.3)
kde vektorova funkcia f : R
n
R
n
je dostatocne hladka . Tento system neza vis
na case t, preto je autono mnym ndimenziona lnym systemom. Existenciu riese-
nia pravy ch stra n rovn c zarucuje nasleduju ca veta o existencii a jednoznacnosti.
(Formula ciu vety a jej do kaz na jdeme v [8], str. 385392)
Veta 1.3.1 (O existencii a jednoznacnosti). Majme system obycajnych diferencialnych
rovn c s pociatocnou podmienkou
x
= f(x), x R
n
, x(0) = x
kde f : R
n
R
n
a je C
1
a x
R
n
. Potom existuje jednoznacne urcene riesenie x
pociatocneho problemu a nejake > 0 tak, ze
x : (, ) R
n
a spl
n a pociatocnu podmienku x(0) = x
.
1.3.1 Dencia. Rovnovazny bod (singularny bod, stacionarny bod, pevny bod) x
sys-
temu 1.3 spl
n a f(x
) = 0.
Rovnova zne body su uzavrety mi invariantny mi mnozinami systemu, ktore lezia
na prieniku nulkl n. x
j
-ta nulkl na systemu 1.3 spl
n a
f
j
(x
1
, . . . , x
n
) = 0, j = 1, . . . , n
1.3.2 Dencia. Riesenie x
(t), t t
0
, ) systemu 1.3 je ljapunovsky stabilne (sta-
bilne), ak kukazdemu > 0 a kazdemu t
1
t
0
existuje = (t, ) > 0 tak, ze kazde
d
alsie riesenie x(t) systemu 1.3, ktore spl
n a x(t
1
) x
(t
1
) < , je denovane
pre vsetky t t
1
a plat x(t) x
(t) < pre vsetky t t
1
. Riesenie, ktore nie je
stabilne, je nestabilne.
1.3.3 Dencia. Riesenie x
(t) systemu 1.3 je asymptoticky stabilne ak plat , ze x
(t)
je stabilne a pre kazde t
1
t
0
existuje = (t
1
) > 0 tak, ze pre riesenie x(t)
systemu 1.3, ktore spl
n a x(t
1
) x
(t
1
) < , plat lim
t
x(t) x
(t) = 0.
1.3.4 Dencia. Rovnova zny bod x
systemu 1.3 je pozitivny atraktor, ak existuje
jeho okolie Otak, ze pre l
ubovol
ne riesenie x(t) systemu1.3, ktore spl
n a x(t
0
) O,
plat lim
t
x(t) = x
. Ak plat ta to vlastnostpre rovnova zny bod x
pre t ,
rovnova zny bod x
je negat vnym atraktorom systemu.
Kapitola 1. Spojite dynamicke systemy 4
1.3.5 Dencia. Limitny cyklus je izolovane periodicke riesenie systemu1.3. Perio da
limitneho cyklu T je dana vztahom f(x(t)) = f(x(t + T)), kde T znac najmensiu
perio du cyklu.
Limitny cyklus je stabilnym limitnym cyklom, ked
vsetky bl zke trajekto rie su n m
pritahovane. Naopak, je nestabilnym limitnym cyklom, ak bl zke trajekto rie smeruju
prec od neho. Ako do sledok PoincareBendixsonovej vety (znenie vety aj jej do kaz
na jdeme v [8], str. 225226 ) plat , ze ked
uzavreta kladne invariantna mnozina
neobsahuje rovnova zne body, mus obsahovatlimitny cyklus.
1.3.1 Linearny system diferencialnych rovnc
Majme linea rny autono mny system:
x
j
= f
j
(x
1
, . . . , x
n
), j = 1, . . . , n (1.4)
ktory mo zeme zap sat konstantnou rea lnou regula rnou maticou A = (a
ij
)
n
i,j=1
nasleduju cim spo sobom:
x
= Ax, (1.5)
kde x R
n
.
1.3.6 Dencia. Perturbovanym systemom k systemu 1.5 je
x
= Ax + g(x), (1.6)
kde A je rea lna regula rna matica typu n n, g(x) = g
j
(x
1
, . . . , x
n
), j = 1, . . . , n a
g(0) = 0.
1.3.7 Dencia. Vlastnym vektorom matice A je nenulovy vektor v, pre ktoru plat
Av = v pre nejake C. Konstanta sa nazy va vlastne c slo matice A pr slusne
k vlastnemu vektoru v. Vlastne vektory su rieseniami charakteristickej rovnice
(AI) v = 0.
Veta 1.3.2. Predpokladajme, ze v je vlastnym vektorom matice A s pridruzenou vlastnou
hodnotou . Potom funkcia x(t) = e
t
v je riesen m systemu x
= Ax.
1 Do kaz. Deriva cia funkcie x je x
(t) = ve
t
. U
pravami bude x
(t) = e
t
(v).
Z predpokladu, ze v je vlastny m vektorom plynie
x
(t) = e
t
(Av) = A(e
t
v) = Ax(t).
Rovnova znym bodom systemu 1.5 je pociatok. Podl
a [4], str. 151, je pociatok
asymptoticky stabilny m rovnova znym bodom, ak vsetky vlastne hodnoty mati-
ce A maju za pornu rea lnu cast. Ak aspon jedno vlastne c slo ma kladnu rea lnu
zlozku, bod je nestabilny.
Kapitola 1. Spojite dynamicke systemy 5
Poznamka (Lineariza cia). Majme system 1.3. Predpokladajme, ze ma rovnova zny
bod v x
= 0 (co mo zeme dosiahnut posunut m). D
alej predpokladajme, ze f(x)
je spojite diferencovatel
na v okol rovnova zneho bodu a determinant Jacobiovej
matice v rovnova znombode je nenulovy. Potommo zeme systemprep satdo tvaru
1.6, kde lim
x0
g(x)
x
= 0. System x
= J(x
)x = J(0)x je linearizovany system
pr slusny k 1.3.
1.3.8 Dencia. Rovnova znybodx
sa nazy va hyperbolicky, akrea lne casti vsetky ch
vlastny ch c siel Jacobiovej matice J(x
) su nenulove. Ak aspon jedno vlastne c slo
Jacobiovej matice lez na imagina rnej osi, rovnova zny bod je nehyperbolicky.
K do lezitej vete a vztahu nelinea rneho systemu a pr slusnej lineariza cie potrebu-
jeme nadenovatpojem loka lnej topologickej ekvivalencie:
1.3.9 Dencia. Dynamicky system
_
T, R
n
,
t
_
je loka lne topologicky ekviva-
lentny v okol rovnova zneho bodu x
s dynamicky msystemom
_
T, R
n
,
t
_
v okol
rovnova zneho bodu y
, ak existuje medzi nimi homeomorzmus h : R
n
R
n
,
ktora zobrazuje trajekto rie prveho systemu na trajekto rie druheho systemu, plat
d
alej, ze h(x
) = y
a homeomorzmus h zachova va smer casu.
Veta 1.3.3 (GrobmanovaHartmanova). Predpokladajme, ze x
je hyperbolickym rov-
novaznymbodomsystemu 1.3. Potomexistuje take okolie bodu x
, kde system1.3 je lokalne
topologicky ekvivalentny so svojou linearizaciou
x
= J(x
).
Vetu a jej do kaz na jdeme v [4], str. 22. Loka lna topologicka ekvivalencia zna-
mena , ze fa zovy portret nelinea rneho systemu a pr slusneho linearizovaneho
sa podoba v bl zkosti rovnova zneho bodu. O stabilite hyperbolickeho rov-
nova zneho bodu nelinea rneho systemu vieme rozhodnu t na za klade stability
rovnova znehobodupr slusnej lineariza cie. Do kaz nasleduju cej vetyna jdeme v[4],
str. 21.
Veta 1.3.4. Nech je x
rovnovaznym bodom systemu 1.3 a vsetky realne casti vlastnych
c siel pr slusnej linearizacie J(x
) su zaporne. Potom rovnovazny bod x
je asymptoticky
stabilny.
Dva systemyvokol ichrovnova znychbodovsu loka lne topologickyekvivalentne,
ak ich lineariza cie maju v rovnova znych bodoch ten isty pocet vlastny ch c siel
s kladny mi a so za porny mi rea lnymi castami.
1.3.2 Klasikacia hyperbolickeho rovnovazneho
bodu v rovine
Majme dvojrozmerny system1.5 s hyperbolicky mrovnova znymbodom(x
, y
) =
(0, 0). Potom existuje regula rna matica transforma cie P tak, ze x = Py, kde y
=
P
1
APy = Qy, kde Q = P
1
AP je v Jordanovom kanonickom tvare. Majme
vlastne c sla matice A tvare
1,2
=
1,2
i
1,2
. Mo zu nastatnasleduju ce pr pady:
Kapitola 1. Spojite dynamicke systemy 6
1
,
2
R
sgn
1
= sgn
2
1
< 0 a
2
< 0, preto lim
t
e
1
t
= 0 , lim
t
e
2
t
= 0. Riesenia kon-
verguju k (x
, y
) na dostatocne malom jeho okol . Bod (x
, y
) je stabilnym
uzlom. Male perturba cie zaniknu v (x
, y
), preto je dokonca asymptoticky
stabilny m uzlom.
1
> 0 a
2
> 0, preto lim
t
e
1
t
= , lim
t
e
2
t
= . Trajekto rie opustia
okolie bodu(x
, y
), vlastne vektory v
1
, v
2
smeruju prec odneho. Bod(x
, y
)
je nestabilnym uzlom.
sgn
1
= sgn
2
Rovnova zny bod (x
, y
) je sedlovym bodom. Dve zo styroch
trajekto ri idu smeromod rovnova zneho bodu, dve smeruju k nemu. Sedlo je vzdy
nestabilny bod.
1
,
2
C Komplexna zlozka reprezentuje rota ciu proti smeru hodinovy ch
ruciciek o radia nov, ak > 0 a v smere hodinovy ch ruciciek o radia nov, ak
< 0.
= 0 Ak rea lna zlozka je nulova , rovnova zny bod je stred.
< 0 Ak rea lna zlozka je za porna , rovnova zny bod je stabilne ohnisko.
> 0 Ak rea lna zlozka je kladna , rovnova zny bod je nestabilne ohnisko.
V pr pade, ze
1,2
R, potom pr slusne vlastne vektory v
1,2
urcuju smer, aky m
sa riesenie bl zi k, alebo sa vzd
aluje od rovnova zneho bodu. Ked
je kladna ,
riesenie vycha dza z rovnova zneho bodu a ide prec od neho, ky m v pr pade, ze
je za porna , riesenie sa bl zi k rovnova znemu bodu.
Charakteristica rovnica Jacobiovej matice J systemu 1.5 v rovnova znom bode
(x
, y
) je tvaru
2
+ = 0. Vlastne c sla
1,2
su koren mi rovnice, kde
= tr J =
1
+
2
a =
1
2
= det J. Na za klade toho mo zu nastatnasleduju ce
pr pady:
det J < 0 Rovnova zny bod je sedlo.
det J > 0
tr J < 0 Rovnova zny bod je stabilny
tr J
2
< 4 det J stabilne ohnisko
tr J
2
> 4 det J stabilny uzol
tr J > 0 Rovnova zny bod je nestabilny
tr J
2
< 4 det J nestabilne ohnisko
tr J
2
> 4 det J nestabilny uzol
Kapitola 1. Spojite dynamicke systemy 7
Obr. 1.1: Fa zovy portret stabilneho
uzla
Obr. 1.2: Fa zovy portret nestabilneho
uzla
Obr. 1.3: Fa zovy portret stabilneho
ohniska
Obr. 1.4: Fa zovy portret nestabilneho
ohniska
Obr. 1.5: Fa zovy portret sedla Obr. 1.6: Fa zovy portret bodu typu
stred
Kapitola 1. Spojite dynamicke systemy 8
1.4 Lokalne bifurkacie nelinearnych spojity ch
systemov v rovine
Majme dynamicky system za visly na parametroch:
x
= f(x, ) (1.7)
kde x R
2
, f je dostatocne hladka funkcia a parameter R
m
. Ako sa men hod-
nota parametra , tak sa men aj fa zovy portret systemu 1.7. Novy fa zovy portret
po zmene mo ze zostat topologicky ekvivalentny s po vodny m, ale jeho topolo gia
sa mo ze aj menit. V okol hyperbolickeho rovnova zneho bodu je system struk-
tura lne stabilny pre malu perturba ciu, co ale nemus platit pre nehyperbolicky
bod.
1.4.1 Dencia. Ked
pri zmene hodnoty parametra vzniknu fa zove portrety,
ktore nie su navza jom topologicky ekvivalentne, hovor me o bifurkacii. Hodnota
parametra, kde zmena nastane, je bifurkacna (kriticka) hodnota parametra.
Na zna zornenie bifurka ci slu zia bifurkacne diagramy. Zobrazia rozklad priestoru
parametra na oblasti pr slusne topologicky ekvivalentny m fa zovy m portretom.
1.4.2 Dencia. Vektorovy priestor y
= g(y, ) je normalnym tvarom vektoroveho
priestoru x
= f (x, ), ak v okol nejakeho bodu (x
) bifurkacne diagramy su
topologicky ekvivalentne.
1.4.1 Jednoparametricke lokalne bifurkacie spojity ch
nelinearnych systemov v rovine
V modeli draveckorist s Hollingovy m II. typom funkcnej odpovedi vystupuju
dva typy jednoparametricky ch bifurka ci : transkriticka a Hopfova bifurka cia. Ty-
picke jednoparametricke bifurka cie v rovine okrem spom nany ch su este vidlic-
kova bifurka cia a bifurka cia typu sedlouzol.
Transkriticka bifurkacia
1.4.3 Dencia. Transkriticka bifurkacia je loka lna bifurka cia, ktora je charakterizo-
vana rovnova znym bodom, ku ktoremu patr vlastne c slo s rea lnou castou, ktorej
hodnoty precha dzaju cez nulu.
Transkriticka bifurka cia, alebo bod vetvenia (branching point), je jedny m z troch
(bifurka cia sedlo-uzol, vidlickova (pitchfork) bifurka cia a transkriticka bifurka cia),
ktore sa mo zu objavitaj v jednodimenziona lnom systeme. Ked
ze v transkritickej
bifurka cii sa pret naju krivky rovnova znych bodov, je vel
mi nepravdepodobne, ze
v priestore s dimenziou viac ako 2 by sa to odohra valo. Preto veta o transkritickej
bifurka cii je formulovana pre jednodimenziona lny pr pad. [15]
Kapitola 1. Spojite dynamicke systemy 9
Veta 1.4.1. Predpokladajme, ze jednodimenzionalny jednoparametricky system
x
= f (x, ), x R, R (1.8)
kde f je hladka funkcia tvaru f (x, ) = xg(x, ), ma pre = 0 nehyperbolicky singularny
bod x = 0. Predpokladajme, ze su splnene podmienky
g
x
(0, 0) = 0, podmienka nedegenerovanosti,
g
(0, 0) = 0, podmienka transverzality.
Potom 1.8 je v okol pociatku lokalne topologicky ekvivalentny so systemom v normalnej
forme transkritickej bifurkacie
y
= y y
2
.
Poznamka. System x
= x x
2
v ktorej do jde k transkritickej bifurka cii je topo-
logicky ekvivalentny so systemom y
= y
2
(osvedc me sa o tom dopl
nen m
na stvorec), ktory je norma lnou formou bifurka cie typu sedlouzol. [11]
Vysetrujeme vlastnosti systemov v norma lnych tvaroch transkritickej bifurka cie
v za vislosti na hodnote parametra.
Majme jednodimenziona lny system
x
= x
2
x = x(x ). (1.9)
Pre = 0 existuje jediny rovnova zny bodsystemu x
= 0 s vlastny mc slom = 0.
Vtedy rovnova zny bod je nehyperbolicky (Obr. 1.8) a tu sa odohra va transkriticka
bifurka cia. Pre = 0 existuju dva rovnova zne body x
1
= a x
2
= 0. Ak < 0
bod x
1
= je nestabilny a x
2
= 0 je stabilny (Obr. 1.7). Pre > 0 je pra ve naopak,
x
1
= je stabilny a x
2
= 0 nestabilny (Obr. 1.9).
Pre system
x
= x
2
+x = x(x +) (1.10)
analy za prebehne podobne. Pre = 0 existuje jediny rovnova zny bod x
= 0
ktory je nehyperbolicky. Pre tu to hodnotu sa odohra va transkriticka bifurka cia
(Obr. 1.11). Pre = 0 existuju dva rovnova zne body x
1
= a x
2
= 0. Ak < 0,
bod x
1
= je stabilny a x
2
= 0 nestabilny (Obr. 1.10). Pre > 0 situa cia je
opacna , x
1
= je nestabilny m bodom a x
2
= 0 stabilny m (Obr. 1.12).
Ak mozne pr pady zna zorn me v rovine (x, ), dostaneme bifurkacny diagram
systemu. Bifurkacny diagram pre system 1.9 je na Obr. 1.13, diagram pre sys-
tem 1.10 na Obr. 1.14. Pre d
alsie dva pr pady norma lnej formy transkritickej
bifurka cie x
= x(x + ) a x
= x(x ) su pr slusne bifurkacne diagramy
na Obr. 1.15 a Obr. 1.16. Nezna zornili sme mozne pr pady v rovine (y, x) v za vis-
losti na hodnote , ale u vahy su podobne ako pri analy ze systemov 1.9 a 1.10 a
z bifurkacny ch diagramov Obr. 1.15 a Obr. 1.16 je vidiet, ako sa menia stabilitne
vlastnosti rovnova znych bodov.
Kapitola 1. Spojite dynamicke systemy 10
x 0 a<0
y
Obr. 1.7: System y =
x
= x(x ), kde
< 0. Rovnova zny bod
x
1
= je nestabilny,
rovnova zny bod, x
2
= 0
je stabilny.
x a=0
y
x*=
Obr. 1.8: System
y = x
= x(x ),
kde x
= = 0, je
jediny m rovnova znym,
nehyperbolicky m
bodom systemu, kde
docha dza k transkritic-
kej bifurka cii.
x 0 a>0
y
Obr. 1.9: System y =
x
= x(x ), kde > 0.
Rovnova zny bod x
1
=
je stabilny, pritom x
2
=
0 je nestabilny.
x 0
a<0
y
Obr. 1.10: System y =
x
= x(x +), kde < 0.
Rovnova zny bod x
1
=
je stabilny rovnova zny
bod, x
2
= 0 je nestabilny.
x
a=0
y
x = *
Obr. 1.11: System y =
x
= x(x + ), kde
x
= = 0 je jediny m
rovnova znym, nehyper-
bolicky m bodom sys-
temu kde sa odohra va
transkriticka bifurka cia.
x
0
a>0
y
Obr. 1.12: System y =
x
= x(x +), kde > 0.
Rovnova zny bod x
1
=
je nestabilny, pritom
x
2
= 0 je stabilny.
Kapitola 1. Spojite dynamicke systemy 11
x
Obr. 1.13: Bifurkacny diagram trans-
kritickej bifurka cie systemu x
=
x(x ). Dve vetvy riesenia pa-
tria k dvom ro znym rovnova znym
bodom x
1
= a x
2
= 0. V bode
= 0 rovnova zne body x
1
a x
2
sply -
vaju . Plynulou zelenou znac me sta-
bilnu , prerusovanou cervenou nesta-
bilnu vetvu riesenia. Pre < 0 je
stabilna vetva rovnova zneho bodu
x
2
= 0, pre > 0 je stabilna vetva
x
2
= .
x
Obr. 1.14: Bifurkacny diagram trans-
kritickej bifurka cie systemu x
=
x(x + ). Dve vetvy riesenia patria
k dvom rovnova znym bodom x
1
=
a x
2
= 0. Pre < 0 je stabilna
vetva pr slusna k x
1
= , pre > 0
je stabilna vetva pr slusna k bodu
x
2
= 0.
x
Obr. 1.15: Bifurkacny diagram sys-
temu x
= x(x + ). Dve vetvy
riesenia su pr slusne rovnova znym
bodom x
1
= a x
2
= 0. Pre < 0
je stabilna vetva pr slusna k bodu
x
2
= 0. Pre > 0 je stabilna vetva
patriaca k bodu x
1
= .
x
Obr. 1.16: Bifurkacny diagram sys-
temu x
= x(x ). Dve vetvy
reprezentuju rovnova zne body x
1
=
a x
2
= 0.Pre < 0 je stabil-
ny m rovnova znym bodom x
1
= .
Pre > 0 je stabilny x
2
= 0.
Kapitola 1. Spojite dynamicke systemy 12
Bifurkacia sedlouzol
Vyssie bola zmienena topologicka ekvivalencia transkritickej bifurka cie a bifurka -
cie sedlouzol. Preto tu uved
me vlastnosti bifurka cie sedlouzol.
1.4.4 Dencia. Bifurka cia ktora sa odohra va pri vzniku = 0, je bifurkacia sedlo
uzol (fold bifurkacia).
Pri bifurka cii sedlouzol sa dva rovnova zne body zlu cia do jedneho a potom
zaniknu .
Veta 1.4.2 (Topologicka norma lna forma bifurka cie sedlouzol). Kazdy jednopara-
metricky jednodimenzionalny system
x
= f (x, ), x R, R,
kde f je dostatocne hladka funkcia, kde pre = 0 existuje rovnovazny bod x
= 0
s vlastnym c slom = J(0, 0) = 0 a kde platia nasleduju ce podmienky:
f
x
(0, 0) = 0, podmienka nedegenerovanosti,
f
(0, 0) = 0, podmienka transverzality,
je lokalne topologicky ekvivalentny v okol pociatku s jednym z nasleduju cich tvarov
normalnej formy bifurkacie sedlouzol
y
= y
2
.
Do kaz na jdeme v [11], str. 8386.
x 0
y
- - a a -
Obr. 1.17: System y =
x
= x
2
+ , kde
< 0. Rovnova zny bod
x
1
=
je stabilny,
rovnova zny bod x
2
=
je nestabilny.
x
y
a=0
Obr. 1.18: System y =
x
= x
2
+ , kde x
=
= 0, je jediny m
rovnova znym, nehyper-
bolicky m bodom sys-
temu.
x 0
y
Obr. 1.19: System y =
x
= x
2
+ , kde >
0. Pre system neexistuje
rovnova zny bod.
Uka zeme spra vanie sa systemov v norma lnej forme bifurka cie sedlouzol v za vis-
losti na hodnote parametru. Majme jednodimenziona lny dynamicky system
x
= + x
2
.
Kapitola 1. Spojite dynamicke systemy 13
Pre = 0 ma system nehyperbolicky rovnova zny bod x
= 0 s vlastny m c slom
= J(0, 0) = 0 (Obr. 1.18). Pre hodnoty < 0 existuju dva rovnova zne body sys-
temu, a to x
1,2
=
, kde bod x
1
=
je stabilny a x
2
=
nestabilny
(Obr. 1.17). Pre > 0 system nema rovnova zne body (Obr. 1.19). Ako hodnoty
smeruju od za porny ch ku kladny m hodnota m cez nulu, dva rovnova zne body sa
sta le bl zia a v = 0 sa zlu cia do jedneho bodu s = 0 a zmiznu .
Analy za pre system x
= x
2
prebehne obdobne, existuju dva rovnova zne body
x
1
=
a x
2
=
pre > 0, kde x
2
je stabilny (Obr. 1.22). Pre < 0 neexistuje
rovnova zny bod systemu (Obr. 1.20).
x 0
y
Obr. 1.20: System y =
x
= x
2
, kde < 0.
Neexistuje rovnova zny
bod systemu.
x
a=0
y
Obr. 1.21: System y =
x
= x
2
, kde x
=
= 0 je jediny m
rovnova znym, nehyper-
bolicky m bodom sys-
temu.
x 0
y
a -a
Obr. 1.22: System y =
x
= x
2
, kde > 0.
Rovnova zny bod x
1
=
je nestabilny, x
2
=
je stabilny.
Zna zornen m vyssie pop sany ch pr padov v rovine (x, ) dostaneme bifurkacne
diagramy systemu pre bifurka ciu sedlouzol.
Kapitola 1. Spojite dynamicke systemy 14
a
x
0
Obr. 1.23: Bifurkacny diagram sys-
temu x
= x
2
+ . Vetva pr slusna
k x
1
=
je stabilna (ze-
lena neprerusovana ), druha vetva
x
2
=
je nestabilna (cer-
vena prerusovana ). V bode =
0 dva rovnova zne body sply vaju
do jedneho, ktory zanika . V tomto
bode nastane bifurka cia sedlouzol.
Pre kladne hodnoty parametra sys-
tem nema rovnova zny bod.
a
x
0
Obr. 1.24: Bifurkacny diagram sys-
temu x
= x
2
. Pre za -
porne hodnoty parametra neexistuje
rovnova znybodsystemu. Pre kladne
hodnoty je stabilna vetva pr slusna
k rovnova znemu bodu x
2
=
a
nestabilna x
1
=
. V bode = 0
nastane bifurka cia sedlouzol.
Hopfova bifurkacia
1.4.5 Dencia. Jav, ked
z rovnova zneho stavu vznikne periodicka oscila cia, je
Hopfova bifurka cia.
Nasleduju ca veta zaist existenciutransforma cie jednoparametricky chdvojdimen-
ziona lnych systemov do norma lnej formy Hopfovej bifurka cie: (Postup, aky m sa
hl
ada norma lna forma Hopfovej bifurka cie, aj do kaz vety na jdeme v [11], str. 91-
100)
Veta 1.4.3. Majme dvojdimenzionalny system tvaru
x
= f (x, ), x R
2
, R,
s hladkou funkciou f = ( f
1
, f
2
), ktora ma pre dostatocne male rovnovazmy bod v x
= 0
s vlastnymi c slami
1,2
() = () i(), kde (0) = 0, (0) =
0
> 0. Nech su
nasleduju ce podmienky splnene:
l
1
(0) = 0, kde l
1
je prvy Ljapunovov koecient (podmienka nedegenerovanosti)
(0) = 0 (podmienka transverzality)
Potomsystemje lokalne topologicky ekvivalentny v bl zkosti pociatku systemu v normalnej
forme Hopfovej bifurkacie
_
y
1
y
2
_
=
_
1
1
__
y
1
y
2
_
_
y
2
1
+ y
2
2
_
_
y
1
y
2
_
.
Kapitola 1. Spojite dynamicke systemy 15
System v norma lnej forme je mozne prep satdo pola rnych su radn c. Tak dostane-
me geometricku predstavu o spra van sa systemu.
x
= x y x(x
2
+ y
2
),
y
= x +y y(x
2
+ y
2
). (1.11)
Pre kazdu hodnotu je rovnova znym bodom systemu bod (0, 0), v ktorom Ja-
cobiova matica ma tvar
_
1
1
_
. Vlastne c sla matice su
1,2
= i. Ak
> 0 pociatok je stabilny m ohniskom, ak < 0, je nestabilny m ohniskom.
Ak = 0, su splnene podmienky pre Hopfovu bifurka ciu, = 0 je bifurkac-
nou hodnotou systemu 1.11. Zavedieme komplexnu premennu z = x + iy. Potom
z
= x
+ iy
= (x + iy) + i(x + iy) (x + iy)(x
2
+ y
2
), ktora pri z = x iy,
|z|
2
= x
2
+ y
2
vedie na komplexny tvar z
= ( + i)z z|z|
2
. Plat z = e
i
,
dz/dt = e
i
+ ie
i
. Z rovnosti ( + 1)e
i
2
e
i
= e
i
+ i e
i
dostaneme
pola rny tvar systemu 1.11:
= (
2
),
= 1. (1.12)
Ak < 0, rovnova zny bod je stabilny m ohniskom, ak > 0, rovnova zny bod je
nestabilny m ohniskom. Pre kladne okolo rovnova zneho bodu vznikne limitny
cyklus, ktory je stabilny. Trajekto rie sa casom natocia na cyklus. Tejto bifurka cii sa
hovor superkriticka Hopfova bifurka cia. System strat svoju stabilitu po bifurka ci
(po prekorocen bifurkacnej hodnoty = 0), bude to ale tzv. jemna (soft, noncatas-
trophic) strata, lebo system po bifurka ci zostane v bl zkosti rovnova zneho bodu.
x
y
Obr. 1.25: Stabilne
ohnisko, ktore vzikne
pre < 0 v systemu
1.12.
x
y
Obr. 1.26: System 1.12
v kritickej hodnote =
0.
x
y
Obr. 1.27: Stabilny cyk-
lus okolo nestabilneho
ohniska, ktory vznikol
Hopfovou bifurka ciou
v systemu 1.12 pre >
0.
System s opacny mi znamienkami
x
= x y + x(x
2
+ y
2
),
y
= x +y + y(x
2
+ y
2
). (1.13)
Kapitola 1. Spojite dynamicke systemy 16
x
y
Obr. 1.28: Superkriticka Hopfova bifurka cia v rovine (, x, y). Pre < 0 existuje
stabilne ohnisko, ktore pre > 0 sa men na nestabilne ohnisko a v jeho okol
vznikne stabilny limitny cyklus so zvacsuju cou sa amplitu dou.
a s pola rnym tvarom
= ( +
2
),
= 1. (1.14)
strat stabilitu podobne v hodnote = 0. Ak < 0, rovnova zny bod je sta-
bilny, naokolo s nestabilny m limitny m cyklom. Cyklus zmizne pri hodnote = 0.
Rovnova zny bod je nestabilny pre > 0. Je to subkriticka Hopfova bifurka cia, kde
strata stability je tzv. ostra (sharp, catastrophic).
x
y
Obr. 1.29: Nestabilny
cyklus so stabilny m
ohniskom pre < 0
v systemu 1.14.
x
y
Obr. 1.30: System 1.14
pre kriticku hodnotu
= 0.
x
y
Obr. 1.31: Nestabilne
ohnisko, ktore vznikne
po Hopfovej bifurka ci
v systemu 1.14 pre >
0.
O typu Hopfovej bifurka cie rozhodujeme na za klade prveho Ljapunovovho koe-
cientu, o ktorom veta ziada, aby l
1
(0) = 0. Postup, ako spoc tat Ljapunovov
koecient je pop sany v [11], str. 91-99. V tejto pra ci sa mu nebudeme venovat
podrobnejsie, naznac me len, ze postup je zalozeny na transforma cii po vodneho
Kapitola 1. Spojite dynamicke systemy 17
x
y
Obr. 1.32: Subkriticka Hopfova bifurka cia v rovine (, x, y). Nestabilne vetvy
su zna zornene prerusovanou ciarou. Pre < 0 rovnova zny bod je stabilny m
ohniskom. V jeho okol je nestabilny limitny cyklus, ktory sa sta le zuzuje, az
pre > 0 cyklus zmizne a rovnova zny bod bude nestabilny m ohniskom.
systemu do norma lnej formy loka lne topologicky ekvivalentneho systemu. Typ
bifurka cie na m naznac znamienko Ljapunovovho koecientu, ktora je totozna
so znamienkom nelinea rnych clenov v norma lnej forme. Ak l
1
> 0, bifurka cia je
subkriticka , ak l
1
< 0 bifurka cia je superkriticka .
Kapitola 2
Modely populacnej dynamiky
Uz odda vna la ka vedcov aj bezny ch l
ud pop sat spra vanie sa zivoc chov a vy -
voj ich interakcie. Na modelovanie podobny ch javov sa dobre vyuz vaju ro zne
matematicke discipl ny. Medzi prvy mi, ktor sa zaoberali matematicky mi po-
pulacny mi modelmi bol anglicy vedec Thomas Robert Malthus a francu zsky ma-
tematik Pierre Francois Verhulst v 19. storoc . Za zmienku stoja vedci z prvej
polovice 20. storocia, American Alfred James Lotka a Talian Vito Volterra.
Zvycajne popisujeme tri za kladne vztahy, ako ro zne druhy zivoc chov vstupuju
do vza jomnej interakcie. Rozozna vame ich na za klade toho, ako pr tomnost jed-
neho druhu ovplyvn vy voj popula cie druhu d
alsieho. Popula cie su vo vztahu
draveckorist, ak pri na raste jednej popula cie z druhej popula cie ubu da. Popula cie
su v su tazi, ak si navza jom preka zaju . Su tazia o ten isty limitovany zdroj, preto
ak je jedna popula cia v su tazi u spesnejsia, druha vie zo zdrojov cerpatmenej, co
spo sobuje u bytok druhej popula cie. Popula cie ziju v symbioze, ked
ich interakcia
prina sa prospech pre kazdu stranu. Na rastom popula cie prveho druhu narastie aj
druha popula cia.
Populacny model daneho zivoc sneho druhu popisuje vy voj popula cie v case
za dany ch podmienok. Celkovy pocet jedincov a zlozenie, struktu ra popu-
la cie maju vel
ky vplyv na cely casovy vy voj. Jedinci v popula cii sa l sia vekom,
vel
kostou, pohlav m atd
. . . Najrea lnejs populacny model by sa na m podarilo
vytvorit, ak by sme pracovali s popula ciou rozdelenou na jedincov s charakte-
risticky mi crtami. V tom pr pade hovor me o strukturovanom populacnom mode-
li. V ekologicky ch a evolucny ch modeloch sa pracuje s nestrukturovanym popu-
lacny m modelom. Nestrukturovanost popula cie znamena pracovat s predpok-
ladom, ze jedinci v danej popula cii su identick , kazdeho je mozne nahradit
jedny m priemerny m clenom popula cie. Z
ivotne prostredie popula cie vel
mi
silno ovplyvn uje jej vy voj. Sem patria faktory ako teplota, pocasie, pr tomnost
dostatocneho mnozstva potravy atd
. . . Zmena vel
kosti popula cie je po sobena u -
mrtnostou (za nikom), rozmnozovan m sa a migra ciou jedincov. Pri modelovan
uzavretej populacie (uzavreteho systemu) sa neuvazuje ani s emigra ciou ani s imigra -
ciou.
18
Kapitola 2. Modely populacnej dynamiky 19
2.1 Populacna rovnica
V celej pra ci budeme pracovat s uzavretou a nestrukturovanou popula ciou. Po-
pulacna rovnica takeho systemu ma vo vseobecnosti nasleduju ci tvar
dN(t)
dt
= B(N) D(N), (2.1)
kde B(N) znac mieru po rodnosti a D(N) mieru za niku celej popula cie. Namiesto
ty chto hodno t sa lepsie vyuz vaju miery spoc tane na jedinca. Mieru po rodnosti
na jedinca znac me b(N) a mieru u mrtia na jedinca d(N). Na tieto pojmy sa
odkazuje aj ako per capita birth rate, per capita death rate.
b(N) =
B(N)
N
,
d(N) =
D(N)
N
.
Pociatocna podmienka populacnej rovnice alebo systemu rovn c znamena pocet
jedincov v danom casovom okamihu, obycajne v case t = 0. Potom podmienka
pre jednodruhovy model vyzera takto: N(0) = N
0
.
2.2 Modely jednodruhovy ch populaci
2.2.1 Malthusov model
Anglican Thomas Malthus (An Assay of the Principle of Population, 1798) po presku -
man matriky jednej farnosti zistil, ze priblizne po kazdy ch 30 rokoch sa pocet
clenov farnosti zdvojna sobnil. Na za klade toho zostavil populacnu rovnicuzna mu
aj ako rovnica exponencialneho rastu:
dN(t)
dt
= rN (2.2)
Riesen m rovnice je N(t) = N
0
e
rt
, s pociatocnou podmienkou N
0
= N(0). Hus-
tota popula cie vykazuje exponencia lny rast, ak r > 0 a klesa exponencia lne, ak
r < 0. Malthus poc tal s konstantnou mierou po rodnosti a u mrtia. Preto gu-
ruje v Malthusovom modeli parameter r , nazy vany aj ako Malthusov parameter
reprezentuju ci rozdiel miery po rodnosti a miery u mrtia. Pre zauj mavost, Malthus
spoc tal pre svoje u daje hodnotu parametru r, ktora mu vysla r = 0, 0231 za rok.
Jeho model tak predpovedal rast poctu clenov farnosti o 2,31 % rocne. [16]
Kapitola 2. Modely populacnej dynamiky 20
2.2.2 Model s logisticky m rastom
Malthusovi vyc tali pr lis zjednoduseny model, preto francu zskymatematikPierre
Francois Verhulst v roku 1838 navrhol populacny model s kvadraticky m clenom:
dN(t)
dt
= rN
_
1
N
K
_
. (2.3)
Riesen m je N(t) =
N
0
K
N
0
+(KN
0
)e
rt
, kde N
0
= N(0) znac pociatocnu vel
kost po-
pula cie N. Parameter r predstavuje mieru rastu, K nosnu kapacitu prostredia
pre dany zivoc sny druh. Rovnica popisuje logisticky rast vel
kosti popula cie. Popu-
la cia narasta maxima lne do kapacity prostredia. V logisticky ch modeloch N = K
je stabilny m rovnova znym stavom. Ky m je N < K, popula cia rastie. Rastie az
do hodnoty K. Akona hle vel
kost popula cie dosiahne hodnotu K, bude sa drzat
okolo nej. Pri hodnota ch N > K popula cia klesa do hodnoty K. Logisticky rast
je za visly na hustote popula cie. C
m je popula cie vacsia, ty m mensia bude miera
rastu spoc tana na jedinca.
2.3 Dvojdruhovy system typu draveckorist:
LotkovVolterrov system
V roku 1928 taliansky matematik Vito Volterra prezentoval vo svojom cla nku
Fluctuations in the abundance of a species considered mathematically dvojdruhovy po-
pulacny model typu dravec korist. Jeho vy skum bol inspirovany skutocnostou
premnozeny ch dravy ch ry b v Jadranskom mori pocas prvej svetovej vojny na-
priek tomu, ze ubudlo mens ch ry b, ktore tvorili ich potravu [16]. Tento model je
zna my pod menom LotkovVolterrov model, lebo neza visle na Volterrovi odvodil
rovnake rovnice aj American Alfred James Lotka.
2.3.1 Zjednodusuju ce predpoklady
Volterrov model vyzaduje niekol
ko zjednodusuju cich predpokladov:
Popula cia koristi v nepr tomnosti dravca rastie exponencia lne a neobmedze-
ne (spra va sa Malthusovsky).
Popula cia dravcov zanikne v nepr tomnosti koristi.
Miera preda cie za vis na pravdepodobnosti stretnutia sa dravca a koristi.
Miera rastu popula cie dravcov je u merna pr jmu potravy.
Kapitola 2. Modely populacnej dynamiky 21
2.3.2 LotkovVolterrov model
dN
dt
= N (a bP)
dP
dt
= P (cN d)
(2.4)
N znac hustotu popula cie koristi, P hustotu popula cie dravca. Majme parametre
a, b, c , d kladne. Popula cia koristi rastie exponencia lne v nepr tomnosti dravca, a je
rastovy koecient koristi na jedinca. V nepr tomnosti koristi popula cia dravca vy-
hynie, d je koecient u mrtnosti dravca na jedinca. Vy raz NP znac pravdepodob-
nost stretnutia sa dravca a koristi, pritom popula cie su rovnomerne rozlozene
na u zem kde ziju a jedinci sa pohybuju na hodne. System 2.4 sa spra va periodicky,
kde perio da za vis na pociatocnom stave systemu a na mierach rastu a u mrtnosti.
2.4 Hollingove typy funkcny ch odpoved predacie
2.4.1 Hollingova rovnica
Modely typu LotkaVolterra su vzdialene od reality. Jedny m do vodom je sku-
tocnost, ze pracuju s linea rnou mierou preda cie, s linea rnou funkcnou odpoved
ou
preda cie. Funkcna odpoved preda cie je vztah, popisuju ci mieru konzuma cie jed-
neho dravca vzhl
adomk hustote koristi. Tento pojemzaviedol Kanad
an Crawford
Stanley Holling v roku1959. Podl
a jeho u vahmusia matfunkcne odpovede nejaku
hornu hranicu z prirodzeny ch do vodov. Dravce sa po istom case nasy tia, preto
miera preda cie za vis na tom, akory chloichtelospracuje potravu. Taktiez sa dravci
nevenuju neusta le lovu. Ked
chytia korist, musia ju skonzumovat, takze o takto
spotrebovany cas sa skra ti cas na vyhl
adanie novej koristi. Pritom cas potrebny
na chytenie a skonzumovanie koristi je nemenny. Preto miera konzuma cie nerastie
neomedzene. Holling zostrojil rovnicu, Hollingovu rovnicu, ktora popisuje vztah
medzi casom potrebny m na na jdenie, chytenie a skonzumenie koristi. Ku tvaru
rovnice dosiel experimentomvykonanomna l
ud
och. Hollingov experiment spoc -
val v tom, ze l
ud
om zaviazal oci a oni potom museli na jst a zdvihnu t z rovneho
povrchu kolieska zo smirgl
oveho papiera. Ludia hrali u lohu dravcov a kolieska
reprezentovali korist[7]. Holling pri experimente zaviedol nasleduju ce veliciny:
N = hustota koristi
a = efektivita hl
adania
T
t
= celkovy cas
T
s
= cas hl
adania koristi
T
h
= cas potrebny na chytenie koristi
P
e
= pocet zjedeny ch jedincov koristi pocas hl
adania
Kapitola 2. Modely populacnej dynamiky 22
Ty mto experimentomsa Holling presvedcil o tom, ze P
e
rastie s rastu cimcelkovy m
casom hl
adania koristi, vacsou popula ciou koristi na zaciatku a s vyssou efekti-
vitou hl
adania: P
e
= aT
s
N. Pri vacsej popula cii N klesa cas potrebny na na jdenie
koristi. Preto T
s
nie je konstantou a plat : T
s
= T
t
T
h
P
e
. Z ty chto (aj intuit vne
ocaka vany ch) vztahov dostal Holling svoju rovnicu v tvare:
P
e
=
aNT
t
1 + aT
h
N
. (2.5)
Rovnica 2.5 je zna ma ako funkcna odpoved
Hollingovho II. typu.
2.4.2 Typy funkcny ch odpoved
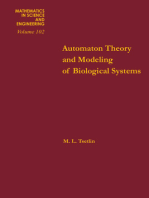
Typ I.
V pr pade, ze cas lovu je vel
mi kra tky (T
h
0), potom 2.5 bude tvaru P
e
= aNT
t
.
Vtedy su dravce schopne zachovatpriamy pomer preda cie aj pri rastu cej hustote
popula cie koristi.
Typ II.
S rastu couhustotoukoristi na zaciatkuporastie miera preda cie, ale casomsa usta li.
Funkcna odpoved
typu II. je tvaru P
e
=
aNT
t
1+aT
h
N
.
Typ III.
Je zhora ohranicena funkcnou odpoved
ou typu II. Pri n zkej hustote koristi sa
funkcne odpovede II. a III. l sia, pri odpovedi typu III. je odpoved
dravcov po-
tlacena . Reprezentuje napr klad situa ciu, ze dravce sa casom naucia efekt vne
lovit, alebo, ze koristma nejaky u kryt, preto ju dravce pri malej hustote nena jdu.
Obr. 2.1: Hollingove funkcne odpovede
Kapitola 2. Modely populacnej dynamiky 23
Okrem najzna mejs ch Hollingovy ch funkcny ch odpoved existuju samozrejme
aj ine. Ine zdroje [9] napr klad hovoria o piatich ro znych mozny ch funkcny ch
odpovediach so vsetky mi parametrami kladny mi:
1. typ f (x) = mx
2. typ f (x) =
m
A+x
3. typ f (x) =
mx
n
A+x
n
, kde n 2,
4. typ f (x) =
mx
2
(A+x)(B+x)
5. typ f (x) = m
_
1 e
Ax
_
2.5 Modikacie Volterrovho systemu
Napriek tomu, ze LotkoveVolterrove systemy 2.4 su nerealisticke, slu zia ako
dobre vy chodisko k zostavovaniu d
als ch, uz rea lnejs ch modelov. Modikovane
modely draveckoristsa nepouz vaju len v biolo gi a v matematike. Pomocou nich
sa modeluju ekonomicke, ekologicke, fyzika lne, dokonca psychologicke javy, vid
napr klad [6]. Modelom draveckorist je kazdorocne venovany ch niekol
ko tis c
vedecky ch cla nkov.
Zavislostna hustote koristi
Rastovy koecient koristi v modeli 2.4 je za visly na hustote. C
ize, c m vacsia je
popula cia, ty m mensia je miera rastu na jedinca. Tento jav je mozne modelovat
ro znymi funkciami, ako napr klad:
f (x) = r
_
1
x
K
_
, funkcia Pielou-a
f (x) = r
_
_
K
x
_
g
1
_
, 1 g > 0, Rosenzweigova funkcia
f (x) = r
_
K
x
1
_
, Shoenerova funkcia
Miera predacie [13]
Modika ciou predacny ch funkci , cize mierou preda cie sa da z skat rea lnejs
model. Obycajne to znamena omedzenu preda ciu, kde sa pouz vaju funkcne
odpovede prezentovane na strane 22.
Model draveckorist, v ktorom guruje logisticky rast koristi a II. typ funkcnej
odpovede preda cie sa nazy va RosenzweigovMacArthurov model.
Kapitola 3
RosenzweigovMacArthurov model
draveckorist
RosenzweigovMacArthurov model interakcie typu draveckorist je modika -
ciou LotkovhoVolterrovho systemu 2.4, kde popula cia koristi rastie logisticky
a funkcna odpoved
preda cie je Hollingovho II. typu. Americania Robert Helmer
MacArthur a Michael. L. Rosenzweig (Graphical representation of stability conditions
of predatorprey interactions, 1963) maju obrovske za sluhy na rozv jan teoretickeho
pr stupu k populacny m modelom typu draveckorist.
3.1 Model
dN
dt
= rN
_
1
N
K
_
f (N, P)P
dP
dt
= e f (N, P)P mP
Popula cia koristi N rastie logisticky. Vlastna (vnu torna ) miera rastu popula cie ko-
risti je g(N) = r
_
1
N
K
_
. Funkcia f (N, P) reprezentuje funkcnu odpoved
preda -
cie, Hollingovu funkciu typu II.:
f (N, P) =
N
(1 +hN)
(3.1)
Potom cely system ma tvar:
dN
dt
= rN
_
1
N
K
_
P
N
(1 +hN)
dP
dt
= eP
N
(1 +hN)
mP
(3.2)
Hustotu popula cie koristi znac me N, hustotu popula cie dravca P. Parameter
r predstavuje mieru rastu koristi, K je kapacita prostredia pre korist, e znac efek-
tivitu, s akou z konzumovanej koristi vznikaju nove dravce a m je miera u mrtnosti
24
Kapitola 3. RosenzweigovMacArthurov model draveckorist 25
dravcov. V Hollingovej funkcii je pravdepodobnost ulovenia koristi dravcom,
h je cas potrebny na ulovenie jednej koristi jedny m dravcom.
Vo funkcnej odpovedi a h nemusia byt konstanty. V pr pade dravcov, kde
medzi jedincami existuje nejaka interakcia, je funkcia za visla na P. Ked
dravce
navza jomspolupracuju , tak c mviac je jedincov v popula ci , ty mu spesnejsie budu
pri love. Preto (P) predstavuje rastu cu funkciu. Ked
dravce medzi sebou su tazia,
(P) je klesaju cou funkciou. Podobne je to s casom potrebny m na ulovenie koristi
h. Ak dravce spolupracuju , potrebuju menej casu na ulovenie koristi, h(P) je kle-
saju cou funkciou. V pr pade konkurencie je h(P) rastu cou funkciou. Take funkcne
odpovede preda cie na jdeme napr klad v [2].
Spra vanie sa systemu 3.2 budeme vysetrovat v za vislosti na parametri m, ktoru
sme si zvolili z do vodu, aby na m pekne vycha dzali vy pocty a vy sledky.
3.2 Zakladna analy za systemu
3.2.1 Nulklny systemu
Polozen m pravy ch stra n rovn c systemu 3.2 rovny m nule, dostaneme predpis
nulkl n (nulovy ch izokl n). Je zrejme, ze N = 0, P = 0 su nulkl nami systemu
3.2. Su invariantny mi mnozinami systemu 3.2 a predstavuju situa ciu, ked
nie je
pr tomna popula cia dravca alebo koristi. Nulkl ny pr slusne k N
= 0 su
N = 0,
P =
r
_
1
N
K
_
(1 +hN) . (3.3)
Nulkl ny odpovedaju ce P
= 0 su
P = 0,
N =
m
(e mh)
. (3.4)
Sku mame biologicky model, preto na s zauj ma spra vanie sa systemu v I. kvad-
rante. Vysetrujeme priesecn ky nulkl n v I. kvadrantu. Ak K >
m
(emh)
, nulkl ny
3.3 a 3.4 nemaju spolocny bod. V opacnom pr pade nulkl ny 3.3 a 3.4 maju jeden
priesecn k. Vtedy v priesecn ku je rovnova zny bod systemu 3.2.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 26
N
P
K 0
r/l
N=0
P=0
N=0
Obr. 3.1: Nulkl ny systemu 3.2. Oranzovou vyznacena parabola reprezentuje 3.3,
modrou su vyznacene nulkl ny odpovedaju ce P
= 0. Vertika lne modre priamky
odpovedaju 3.4 pre ro zne hodnoty parametra m.
3.2.2 Rovnovazne body systemu
Rovnova zne body systemu z skame polozen m pravy ch stra n rovn c 3.2 rovny m
0. RosenzweigMacArthurov model ma tri rovnova zne body. K vyjasneniu stabil-
itny ch vlastnost rovnova znych bodov su potrebne vlastne c sla Jacobiovej matice
vyhodnotenej v danom rovnova znom bode. Jacobiova matica systemu 3.2 ma tvar
J =
_
_
r 2r
N
K
P
(1+hN)
+ NP
2
h
(1+hN)
2
N
(1+hN)
eP
(1+hN)
2
eN
(1+hN)
m
_
_
(3.5)
Nulovy rovnovazny bod E
0
= (0, 0)
Vtompr pade hustota popula cie koristi a dravca je nulova , takze na danomu zem
nie su pr tomne ani dravce, ani korist. Jacobiova matica vyhodnotena v E
0
je:
J
E
0
=
_
r 0
0 m
_
Determinant matice J
E
0
je
det J
E
0
= rm.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 27
Stopa matice je
tr J
E
0
= r m.
Vlastne hodnoty pr slusne bodu E
0
su
1
= r,
2
= m.
Hodnoty r, m su kladne, preto det E
0
< 0. Bod E
0
je sedlovy m bodom (saddle).
U
vahy o vlastny ch hodnota ch to potvrdzuju , lebo
1
= r a
2
= m. Na inva-
riante N = 0 je E
0
stabilny, ky m na invariante P = 0 nestabilny.
Rovnovazny bod E
K
= (K, 0)
Kapacita prostredia je rovnova znym bodom systemu 3.2, ked
nie je pr tomna
popula cia dravca. Ked
ze v tom pr pade popula cia koristi rastie logisticky, rastie
maxima lne do kapacity prostredia K. Jacobiova matica v bode E
K
ma tvar:
J
E
K
=
_
r K
(1+hK))
0 eK
(1+hK)
m
_
Determinant matice je
det J
E
K
= r
_
eK
(1 +hK)
m
_
,
stopa matice
tr J
E
K
= r + eK
(1 +hK)
m,
vlastne hodnoty su
1
= r,
2
= eK
(1 +hK)
m.
Ak m nadobu da hodnotu
m
T
= eK
(1 +hK)
, (3.6)
jedno z vlastny ch c siel J
E
K
je nulove. Vtedy bod E
K
je nehyperbolicky m rovno-
va znym bodom. Ak je m = m
T
, mo zu nastatpr pady:
Ak m < m
T
, E
K
je sedlovy m bodom. Obidva vlastne c sla pr slusne k matici
J
E
K
su rea lne, jedno s kladnou, druhe so za pornou hodnotou.
Ak m > m
T
, E
K
je stabilny rovnova zny bod, stabilny uzol, kde pr slusne
vlastne c sla su rea lne a za porne.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 28
Netrivialny rovnovazny bod E
Netrivia lny (vnu torny ) rovnova zny bod je E
= (N
, P
), kde
N
=
m
(e mh)
a
P
= re
K(e mh) m
2
K(e mh)
2
.
Jacobiova matica v netrivia lnom rovnova znom bode ma tvar:
J
E
=
_
mr
e
_
h
e+mh
h(emh)
_
m
e
r
_
e mh
m
K
_
0
_
Determinant matice J
E
je
det J
E
=
mr
e
_
e mh
m
K
_
,
stopa matice je
tr J
E
=
mr (hK (e mh) e mh)
eK (e mh)
.
Zbiologickeho hl
adiska E
je mozne interpretovatlen vtedy, ak hodnoty N
, P
su
kladne (neza porne), cize sa vyskytuju v danom prostred nejake zivoc chy. Z tejto
podmienky plynie, ze e mh > 0 a m < m
T
. Ak su splnene tieto podmienky,
det J
E
je kladny. Stopa Jacobiovej matice tr J
E
= 0, ak m = m
H
, kde
m
H
= e
hK 1
h(1 +hK)
. (3.7)
Na za klade u vah o stabilite bodu E
K
vid me, ze ak m > m
T
, potom bod E
K
je sta-
bilny m uzlom a vnu torny rovnova zny bod nadobu da za porne hodnoty, co nijako
nezapo sob na spra vanie sa systemu. Rovnova zny bod E
K
bude pre tento pr -
pad jediny m stabilny m rovnova znym bodom, ktory je dosiahnutel
ny pre vsetky
pociatocne podmienky systemu. Ak m < m
T
, bod E
K
je sedlovy m bodom a netri-
via lny bod E
je stabilny m rovnova znym bodom systemu 3.2. Na za klade toho,
ake hodnoty nadobu da parameter m, mo zu nastatnasleduju ce pr pady:
m > m
T
, potom E
0
je sedlo, E
K
je stabilny uzol a E
je nezauj mavy z biolo-
gickeho hl
adiska. Vid
Obr. 3.2.
m
H
< m < m
T
, pr pad zahrn a dve topologicky nerozl sitel
ne moznosti:
E
0
, E
K
su sedlovy mi bodmi, E
je stabilny uzol (dve vlastne hodnoty su
rea lne a za porne). Vid
Obr. 3.3.
E
0
, E
K
su sedlovy mi bodmi, E
je stabilny m ohniskom (dve vlastne
hodnoty komplexne a za porne). Vid
Obr. 3.4.
m < m
H
, body E
0
, E
K
su sedlovy mi bodmi, E
sa men na nestabilne ohnisko
(s vlastny mi hodnotami komplexny mi a kladny mi) so stabilny m limitny m
cyklom v okol . Vid
Obr. 3.6.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 29
-1
0
1
2
3
4
5
0 2 4 6 8 N
P
Obr. 3.2: Fa zovy portret pre pr pad, ked
m > m
T
. Trajekto rie smeruju do bodu
E
K
, ktory je pre tu to hodnotu parametra stabilny m uzlom. Bod E
je nezauj mavy
z biologickeho hl
adiska. (m = 3, 9) Popula cia dravca po case vymiera a korist
rastie do kapacity prostredia K.
-1
0
1
2
3
4
5
0 2 4 6 8
P
N
Obr. 3.3: Fa zovy portret pre pr pad, kedy m
H
< m < m
T
. Trajekto rie smeruju
do bodu E
, ktory je stabilny m uzlom. E
K
je nestabilny uzol (oznacena cervenou).
(m = 3, 6)
Kapitola 3. RosenzweigovMacArthurov model draveckorist 30
-1
0
1
2
3
4
5
0 2 4 6 8
P
N
Obr. 3.4: Fa zovy portret pre druhu moznost m
H
< m < m
T
. Jediny m stabilny m
pevny m bodom systemu je E
, je typu ohnisko. (m = 3, 3) Medzi popula ciami
nastane rovnova ha.
0
0,5
1
1,5
2
2,5
3
0 1 2 3 4 5 6 7 8
N
P
Obr. 3.5: Fa zovy portret zna zorn uju ci limitny cyklus, bl zko ku kritickej hodnote
m
H
. (m = 3, 27)
Kapitola 3. RosenzweigovMacArthurov model draveckorist 31
-1
0
1
2
3
4
5
0 2 4 6 8
N
P
Obr. 3.6: Fa zovy portret pre m < m
H
. E
je nestabilny m ohniskom, okolo ktoreho
vznikne stabilny limitny cyklus. (m = 2, 5) Vsetky trajekto rie sa natocia na tento
cyklus. Vel
kostpopula ci kol sa.
Pre gracke zna zornenie mozny ch pr padov boli zvolene nasleduju ce hodnoty
parametrov K = 8, e = 1, r = 2, h = 0, 25, = 5 a vhodne m.
3.3 Bifurkacna analy za systemu
3.3.1 Transkriticka bifurkacia
V systeme 3.2 nastane transkriticka bifurka cia pre hodnotu parametra m = m
T
.
Pre tu to hodnotu sa stane z nestabilneho E
K
stabilny uzol a stabilny E
sa desta-
bilizuje. Na bifurkacny ch diagramoch 3.9, 3.10 vidiet, ze krivky reprezentuju ce
rovnova zne body E
K
a E
sa pret naju v bode transkritickej bifurka cie. Tento jav
mo zeme interpretovattak, ze pri m > m
T
je miera u mrtnosti dravcov taka vysoka ,
ze dravce uz neovplyvnia rast popula cie koristi, ktora zac na ra st logisticky az
do kapacity prostredia.
Vysetrujeme priebeh funkcie N =
m
(emh)
v za vislosti na parametri m.
dN
dm
=
e
(e mh)
2
> 0
Je rastu cou funkciou pre vsetky hodnoty parametru. Hl
ada me prienik kriviek,
preto
K =
m
(e mh)
odkial
dostaneme hodnotu parametra, kde sa odohra va transkriticka bifurka cia
m = eK
(1 +hK)
= m
T
.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 32
m 0
N
K
m
T
Obr. 3.7: Transkriticka bifurka cia, ktora sa odohra va pri pret nan kriviek pr slus-
ny ch k rovnova znym bodom E
K
a E
v bifurkacnej hodnote m = m
T
.
3.3.2 Hopfova bifurkacia
Hopfova bifurka cia v systeme 3.2 pre parameter m nastane v hodnote m = m
H
.
V rovnova znom bode E
je det J
E
= er
(hK1)
h
2
K(hK+1)
. Determinant je kladny, ak
hK > 1. Stopa matice J
E
je nulova a pr slusne vlastne c sla su komplexne
s nulovy mi rea lnymi castami. Na konkretnych bifurkacny ch diagramoch 3.9 a
3.10 vid me, ze pre m < m
H
je E
nestabilny m ohniskom so stabilny m limitny m
cyklom okolo a pre m > m
H
E
je stabilny m ohniskom. Hopfova bifurka cia, ktora
sa tu odohra va, je superkritickou Hopfovou bifurka ciou. Pre m < m
H
trajekto rie
vycha dzaju ce z okolia rovnova zneho bodu E
sa casom natocia na cyklus a sys-
tem sa zacne spra vatperiodicky, vel
kostpopula ci kol sa. C
m mensia je hodnota
miery u mrtia dravcov m, ty m viac sa destabilizuje system. Limitny cyklus sa
zvacsuje, to vedie k za niku popula ci .
Vysetrujeme priebeh funkcie P =
r
_
1
N
K
_
(1 +hN), kde N =
m
(emh)
v za vis-
losti na parametri m. Deriva ciou dostaneme
dP
dm
=
er
(e mh)
2
_
h
e + mh
K(e mh)
_
.
Z toho dostaneme, ze funkcia men svoju monoto nnostv hodnote
m =
e(hK 1)
h(hK + 1)
= m
H
.
V tomto bode sa odohra va Hopfova bifurka cia, kde stabilny cyklus zanikne a
stabilny m sa stane rovnova zny bod E
K
, co znamena za nik popula cie dravca P.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 33
Prienik s osou m (cize P = 0) je v hodnote
m = m
T
= eK
(1 +hK)
.
m 0
P
r/l
m
H
l
2
h
K
(
h
K
1
)
l
+
2
0
,
2
5
r
m
T
Obr. 3.8: Hopfova bifurka cia nastane pre hodnotu parametra m = m
H
.
Bifurkacne diagramy boli vykreslene pre hodnoty parametrov r = 2, e = 1, K = 8,
= 5, h = 0, 25.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 34
0
2
4
6
8
10 N
0 0,5 1 1,5 2 2,5 3 3,5 4
m
BP
HB
m
H
m
T
Obr. 3.9: Bifurkacny diagram pre popula ciu koristi N a parameter m. Stabilny
limitny cyklus zanikne pri hodnote m = m
H
. Popula cia koristi rastie az dokapacity
prostredia, co dosiahne, ked
m = m
T
. Po tom, ako popula cia koristi dosiahla svoje
maximum, bude sa drzatokolo tej hodnoty. Popula cia dravcov uz nie je pr tomna
v systeme, lebo pre hodnoty m > m
T
je stabilny m rovnova znym bodom E
K
.
0
2
4
6
8
10
P
0 1 2 3 4 5
m
BP
HB
m
T m
H
Obr. 3.10: Bifurkacny diagram pre popula ciu dravca P a parameter m. Stabilny
limitny cyklus zanikne pre m = m
H
. Transkriticka bifurka cia nastane pre hod-
notu m = m
T
, kedy E
prestane byt stabilny m bodom a stabilny bude E
K
, kedy
v systemu uz nie su pr tomne dravce.
Kapitola 3. RosenzweigovMacArthurov model draveckorist 35
3.4 Paradox dostatku a paradox zaniku
3.4.1 Paradox dostatku
RosenzweigovMacArthurov model 3.2 je presla veny ty m, ze v casovom vy voji
systemu sa objav tzv. paradox dostatku (paradox of enrichment). Objav sa destabi-
liza ciou systemu, ak sa zvy si dostupnost zdrojov energie pre korist. Zvacsuju ca
sa kapacita prostredia K pre korist vedie k premnozeniu dravcov a nakoniec aj
k za niku popula ci . Na tento jav prvy kra t pouka zal Rosenzweig v roku 1971.
Odvtedy je tento jav vel
mi obl
u beny a casto diskutovany medzi vedcami,
lebo niekol
ko vy skumov Rosenzweigov objav potvrdilo, niekol
ko ho vyvra tilo.
Dokonca ani samotne pomenovanie nie je zjednotene. Pojem paradox Rosen-
zweig vysvetlil ako rozporuplny vplyv dostatku, lebo dostatok je vn many ako
nieco s pozit vnym vplyvom na rast popula cie koristi. Pritom model predikuje
destabiliza ciu systemu a za nik popula ci . Ine vysvetlenie pojmu paradox je, ze
sa vztahuje na rozpor medzi spra van msa systemu, ktory predikuje model a medzi
rea lnymi systemami draveckorist [18]. Rosenzweig a MacArthur destabiliza ciu
vysvetili superkritickou Hopfovou bifurka ciou, ktora sa odohra va pri zvy sen K
(Obr. 3.11 a Obr. 3.12). Pre kriticku hodnotu K vznikne liminty cyklus so sta le sa
zvacsuju cou amplitu dou, co vedie k za niku popula ci . K transkritickej bifurka cii
do jde pri hodnote
K = K
T
=
m
(e mh)
.
Hopfova bifurka cia sa odohra va pri bifurkacnej hodnote parametra
K = K
H
=
e + mh
h(e mh)
.
3.4.2 Analo gia paradoxu dostatku
Vyssie pop sany jav, paradox dostatku, sa odohra va v modeli 3.2 pre hodnoty
parametra K. Hopfova bifurka cia ma podobne destabilizuju ci vplyv pre hodnoty
parmetra m reprezentuju ceho mieru u mrtia dravcov. Nasleduju ci paradox, ako
analo giu k paradoxu dostatku, mo zeme nazvat ako paradox za niku oboch po-
pula ci . Pri miere u mrtia dravcov mensej ako m
H
sa v systeme objav limitny
cyklus so sta le vacsou amplitu dou. Popula cie sa dostanu tak bl zko k nule, ze
nakoniec zaniknu . Paradox spoc va v tom, ze pri n zkej miere u mrtia dravcov
by bolo prirodzene ocaka vat, ze nastane nejaka rovnova ha medzi popula ciami.
Pritom model predikuje jav s opacny m efektom: za nik oboch popula ci .
Kapitola 3. RosenzweigovMacArthurov model draveckorist 36
-0,5
0
0,5
1
1,5
2
2,5
3 N
-0,5 0 0,5 1 1,5 2 2,5 3
K
K
T K
H
Obr. 3.11: Bifurkacny diagram systemu 3.2 v rovine N a K, parameter kapacity
prostredia pre korist. Pri prekrocen hodnoty K
H
sa predty m stabilny system
destabilizuje a docha dza k za niku popula ci - paradox dostatku.
-0,5
0
0,5
1
1,5
2
2,5
3 P
-0,5 0 0,5 1 1,5 2 2,5 3
K
K
T K
H
Obr. 3.12: Bifurkacny diagram systemu 3.2 v rovine P a K. System sa destabilizuje
po prekrocen K
H
, docha dza k paradoxu dostatku.
Zaver
Ta to pra ca bola venovana RosenzweigovmuMacArthurovmu modelu dravec
korist, kde funkcia preda cie je Hollingovho II. typu. V tomto systemu do jde
k za niku popula ci pri zvy sen kapacity prostredia, je to jav zna my ako para-
dox dostatku. Ciel
om bolo zistit, ci sa odohra va jav podobny paradoxu dostatku
pre iny parameter, parameter miery u mrtnosti preda tora. Podarilo sa uka zat, ze
taky to jav nastane a nazvali sme ho paradoxom za niku. Pre kriticku hodnotu
parametra u mrtnosti dravcov vznikne v systemu superkriticka Hopfova bifurka -
cia, ktora system destabilizuje, co vedie k za niku obidvoch popula ci .
37
Zoznam pouzitej literatu ry
[1] Lenka Bara kova , Asymptoticke vlastnosti resen diferencialnych rovnic a jejich
aplikace v ekonomii, Brno, 2003. Dizertacna pra ca. Masarykova univerzita,
Pr rodovedecka fakulta, Katedra matematickej analy zy.
[2] Ludek Berec, Impacts of Foraging Facilitation Among Predators on Predatorprey
Dynamics, Bulletin of Mathematical Biology 72 (2010), c. 1, 94121. DOI:
10.1007/s11538-009-9439-1.
[3] David S. Boukal, Maurice W. Sabelis a Ludek Berec, How predator functional
responses and Allee effects in prey affect the paradox of enrichment and popula-
tion collapses, Theoretical Population Biology 72 (2007), c. 1, 136147. ISSN
00405809. DOI: 10.1016/j.tpb.2006.12.003.
[4] Carmen Charles Chicone, Ordinary Differential Equations with Applications,
Springer-Verlag, New York, 1999, ISBN 03-879-8535-2.
[5] Fabio Dercole a Sergio Rinaldi, Dynamical Systems and Their Bi-
furcations. V: Sergio Cerutti a Carlo Marchesi, Advanced Methods
of Biomedical Signal Processing, IEEE Press, Piscataway, 2011. Dos-
tupne z: ftp://ftp.elet.polimi.it/users/Carlo.Piccardi/VarieDsc/
DercoleRinaldi.pdf. ISBN 0470422149.
[6] John M. Gottman, The Roles of Conict Engagement, Escalation, and Avoidance in
Marital Interaction: A longitudinal View of Five Types of Couples, Journal of Con-
sulting and Clynical Psychology 61 (1993), c. 1, 615. DOI: 10.1037//0022-
006X.61.1.6.
[7] James W. Haefner, The Holling Disc Equation. Indiana University [online],
2001 [cit. 20130521]. Dostupne z: http://www.indiana.edu/~oso/lessons/
BioMath/hd-root.pdf.
[8] Morris W. Hirsch, Stephen Smale a Robert L. Devaney, Differential Equations,
Dynamical Systems and an Introduction to Chaos, 2. vyd., Pure and Applied
Mathematics, CA: Academic Press, San Diego, 2004. ISBN 978-0-12-349703-1.
[9] Nguyen Huu Du, Nguyen Minh Man a Tong Thanh Trung, Dynamics
of Predatorprey Population with Modied LeslieGower and Hollingtype II
Schemes, Acta mathematica Vietnamica 32 (2006), c. 1, 99111. ISSN 0251-
4184.
38
Zoznam pouzitej literatu ry 39
[10] Vlastimil Krivan, The LotkaVolterra PredatorPrey Model with Foraging
Predation Risk TradeOffs, The American Naturalist 170 (2007), c. 5, 771782.
ISSN 0003-0147. DOI: 10.1086/522055.
[11] Yuri A. Kuznetsov, Elements of Applied Bifurcation Theory, 2. vyd., Springer-
Verlag, New York, 1998, ISBN 03-879-8382-1.
[12] Stephen Lynch, Dynamical Systems with Applications Using MAPLE, 2. vyd.,
Birkh auser, Boston, 2010, ISBN 978-081-7646-059.
[13] James D. Murray, Mathematical biology, 1. vyd., Springer-Verlag, New York,
1989, ISBN 03-871-9460-6.
[14] Hinke Osinga, Bifurcations. Bristol University [online], 2004 [cit. 201305
21]. Dostupne z: http://www.enm.bris.ac.uk/teaching/hinke/NDC/notes/
set12.pdf.
[15] Lenka Pribylova , Nelinearn dynamika a jej aplikace[online]. 1 vyd. Brno:
Masarykova univerzita, 2012 [cit. 2013-05-21]. Elporta l. Dostupne z: http:
//is.muni.cz/elportal/?id=986888. ISBN 978-80-210-5969-6. ISSN 1802-
128X.
[16] Andre M. de Roos, Modeling Population Dynamics. Universiteit van Amster-
dam [online], 2011 [cit. 20130521]. Dostupne z: http://staff.science.
uva.nl/~aroos/downloads/pdf_readers/syllabus.pdf.
[17] Ru diger Seydel, Practical Bifurcation and Stability Analysis, 3. vyd., Interdisci-
plinary Applied Mathematics, Springerm New York, 2010, ISBN 14-419-1739-
X.
[18] Roy Shovonlal a J. Chattopadhyay, The stability of ecosystems: a brief overview of
the paradox of enrichment, Journal of Biosciences 32 (2007), c. 2, 421428. ISSN
0250-5991.
[19] George van Voorn, PhD mini course: Introduction to bifurcation analysis, Am-
sterdam, 2006. Dostupne z: http://www.bio.vu.nl/thb/research/project/
globif/.
[20] G. A. K. van Voorn, D. Stiefs, T. Gross, et al., Stabilization due to predator
interference: comparison of different analysis approaches, Mathematical Bioscience
and Engineering 5 (2008), 567583.
[21] Jinfeng Wang, Junping Shi a Junjie Wei, Predatorprey system with strong Allee
effect in Prey, Journal of Mathematical Biology 62 (2011), c. 3, 291331. ISSN
0303-6812. DOI: 10.1007/s00285-010-0332-1.
You might also like
- NoDocument632 pagesNoValentina De Miglio100% (2)
- Sinai1992 Book ProbabilityTheoryDocument148 pagesSinai1992 Book ProbabilityTheoryRicardo Ramirez100% (1)
- Nonlinear Dynamics of Discrete and Continuous Systems: Andrei K. Abramian Igor V. Andrianov Valery A. Gaiko EditorsDocument284 pagesNonlinear Dynamics of Discrete and Continuous Systems: Andrei K. Abramian Igor V. Andrianov Valery A. Gaiko EditorsFlávio AugustoNo ratings yet
- Computational Methods in Power System AnalysisDocument113 pagesComputational Methods in Power System Analysisrsrtnj100% (8)
- ES Systems Biology NotesDocument283 pagesES Systems Biology NotesMohit KumarNo ratings yet
- Stochastic Dynamics and Irreversibility: Tânia Tomé Mário J. de OliveiraDocument402 pagesStochastic Dynamics and Irreversibility: Tânia Tomé Mário J. de OliveiraSolange Oliveira100% (1)
- Numerical Methods For The Life Scientist PDFDocument160 pagesNumerical Methods For The Life Scientist PDFAnonymous Zsi5ODm2PY100% (1)
- An Introduction To Modelling Neural DynamicsDocument443 pagesAn Introduction To Modelling Neural DynamicsWargner Moreno L.100% (1)
- #Data Assimilation - Mathematical Concepts and Instructive ExamplesDocument140 pages#Data Assimilation - Mathematical Concepts and Instructive ExamplesMichael G. TadesseNo ratings yet
- Non-Equilibrium Thermodynamics in Multiphase FlowsDocument272 pagesNon-Equilibrium Thermodynamics in Multiphase FlowsUzielSanchezNo ratings yet
- Water Hammer Simulations by S. MambrettiDocument201 pagesWater Hammer Simulations by S. MambrettiRamiro Rodriguez CarvajalNo ratings yet
- On The Geometry of Grassmannians and The Symplectic Group: The Maslov Index and Its ApplicationsDocument177 pagesOn The Geometry of Grassmannians and The Symplectic Group: The Maslov Index and Its ApplicationsMiguel OrrilloNo ratings yet
- Hsm7n Continuum Modeling in The Physical SciencesDocument238 pagesHsm7n Continuum Modeling in The Physical SciencesSF1234567890No ratings yet
- Homological Methods, Representation Theory, and Cluster AlgebrasDocument231 pagesHomological Methods, Representation Theory, and Cluster AlgebrasJulian SernaNo ratings yet
- Notes BiomathDocument283 pagesNotes BiomathAndrea Espinosa67% (3)
- Sator N Pavloff N Couedel L Statistical PhysicsDocument451 pagesSator N Pavloff N Couedel L Statistical PhysicsStrahinja Donic100% (1)
- (Lecture Notes in Bioengineering) Socrates Dokos-Modelling Organs, Tissues, Cells and Devices - Using MATLAB and COMSOL Multiphysics-Springe PDFDocument503 pages(Lecture Notes in Bioengineering) Socrates Dokos-Modelling Organs, Tissues, Cells and Devices - Using MATLAB and COMSOL Multiphysics-Springe PDFEdimari6No ratings yet
- Control System Design - An Introduction To State-Space Methods - FriedlandDocument97 pagesControl System Design - An Introduction To State-Space Methods - FriedlandAnderson F Miranda SilvaNo ratings yet
- Mathematical Biology: Jeffrey R. ChasnovDocument119 pagesMathematical Biology: Jeffrey R. ChasnovdrkapilkohliNo ratings yet
- Mathematical Biology: Jeffrey R. ChasnovDocument119 pagesMathematical Biology: Jeffrey R. ChasnovdrkapilkohliNo ratings yet
- Vector Fields On Singular Varieties PDFDocument242 pagesVector Fields On Singular Varieties PDFDimasNo ratings yet
- Variational Principles in Physics - BasdevanrDocument15 pagesVariational Principles in Physics - Basdevanrruben carrionNo ratings yet
- PdematDocument90 pagesPdematSounak SadhukhanNo ratings yet
- Bifurcation Analysis of The Modified Lotka-Volterra Prey-Predator ModelDocument44 pagesBifurcation Analysis of The Modified Lotka-Volterra Prey-Predator ModelMiliyon TilahunNo ratings yet
- Geometricka Teorie Integrabilnich SystemuDocument59 pagesGeometricka Teorie Integrabilnich SystemuKaren VillaNo ratings yet
- PHD ThesisDocument382 pagesPHD ThesisPau Lina100% (1)
- An Introduction To Mathematical ModellingDocument34 pagesAn Introduction To Mathematical Modellinghaithamelramlawi7503No ratings yet
- Geometria Diferencial BomDocument220 pagesGeometria Diferencial BomLuis Anthony Miñope GaonaNo ratings yet
- Lectures BioDocument49 pagesLectures BioBaboucarr CeesayNo ratings yet
- Fundamentals of Mathematical Statistics: Pavol OršanskýDocument85 pagesFundamentals of Mathematical Statistics: Pavol OršanskýyomnayasminNo ratings yet
- Oracle InequalitiesDocument259 pagesOracle Inequalities王家宝No ratings yet
- An Introduction To Mathematical ModellingDocument34 pagesAn Introduction To Mathematical ModellingSrijit SanyalNo ratings yet
- Roshchina2014 PDFDocument213 pagesRoshchina2014 PDFKaran KumarNo ratings yet
- Ms Var LibroDocument369 pagesMs Var LibroMartin VallejosNo ratings yet
- Paul Fieguth - An Introduction To Complex Systems. Society, Ecology and Nonlinear Dynamica-Springer (2017) PDFDocument348 pagesPaul Fieguth - An Introduction To Complex Systems. Society, Ecology and Nonlinear Dynamica-Springer (2017) PDFemmanuel santoyo rioNo ratings yet
- Stat 509 NotesDocument195 pagesStat 509 NotesJon100% (1)
- Mthesisv2 Final CorrectedDocument66 pagesMthesisv2 Final CorrectedSugumar Lakshmi NarayananNo ratings yet
- Important Applications of The Behrens-Fisher Statistic and The False Discovery RateDocument88 pagesImportant Applications of The Behrens-Fisher Statistic and The False Discovery RateJavier E. Guerrero ArrietaNo ratings yet
- Models and Methods in Mathematical EpidemiologyDocument28 pagesModels and Methods in Mathematical EpidemiologyDorothyNRNo ratings yet
- Computer-Aided Introduction To EconometricsDocument349 pagesComputer-Aided Introduction To EconometricsHenne PopenneNo ratings yet
- Mathematics of Infectious DiseaseDocument63 pagesMathematics of Infectious Diseasetibebu tuluNo ratings yet
- (Progress in Nonlinear Differential Equations and Their Applications 17) Serge Alinhac (Auth.) - Blowup For Nonlinear Hyperbolic Equations (1995, Birkhäuser Basel)Document125 pages(Progress in Nonlinear Differential Equations and Their Applications 17) Serge Alinhac (Auth.) - Blowup For Nonlinear Hyperbolic Equations (1995, Birkhäuser Basel)Sergio Quisbert P.No ratings yet
- Elliptic Systems of Phase Transition Type: Nicholas D. Alikakos Giorgio Fusco Panayotis SmyrnelisDocument349 pagesElliptic Systems of Phase Transition Type: Nicholas D. Alikakos Giorgio Fusco Panayotis SmyrnelisSergio Quisbert P.No ratings yet
- How Do Children Swing?Document46 pagesHow Do Children Swing?cienioNo ratings yet
- Basicsofstatisticalmethods PDFDocument85 pagesBasicsofstatisticalmethods PDFShankar Sharath KNo ratings yet
- Anthony Young MS Physics Thesis 2018 OhioLINK FinalDocument60 pagesAnthony Young MS Physics Thesis 2018 OhioLINK Finaltanishkjain2015No ratings yet
- The Free Energy Principle For A Particular PhysicsDocument6 pagesThe Free Energy Principle For A Particular PhysicsGunnar CalvertNo ratings yet
- Harder 1982Document53 pagesHarder 1982daxel123No ratings yet
- Topics in Statistical Mechanics: The Foundations of Molecular SimulationDocument146 pagesTopics in Statistical Mechanics: The Foundations of Molecular SimulationsupitanNo ratings yet
- Jia Grad - Msu 0128D 15316Document168 pagesJia Grad - Msu 0128D 15316JASSNARRONo ratings yet
- Rice E 2018 PHD ThesisDocument206 pagesRice E 2018 PHD ThesisPablo Ramos SilvaNo ratings yet
- Natasha Maurits (Auth.) - From Neurology To Methodology and Back - An Introduction To Clinical Neuroengineering (2012, Springer-Verlag New York)Document301 pagesNatasha Maurits (Auth.) - From Neurology To Methodology and Back - An Introduction To Clinical Neuroengineering (2012, Springer-Verlag New York)Ricardo Jaramillo DiazNo ratings yet
- Complex Adaptive SystemsDocument10 pagesComplex Adaptive SystemsPopa EmiliaNo ratings yet
- Population Genetics: TutorialDocument164 pagesPopulation Genetics: Tutorialshiksha torooNo ratings yet
- Stochastic Epidemic Models - 2019 - Britton, PardouxDocument124 pagesStochastic Epidemic Models - 2019 - Britton, PardouxMds DmsNo ratings yet
- Automation Theory and Modeling of Biological SystemsFrom EverandAutomation Theory and Modeling of Biological SystemsNo ratings yet
- MatlabDocument33 pagesMatlabrutkiskaccsaNo ratings yet
- Logo Adle Onyourside Group en WhiteDocument1 pageLogo Adle Onyourside Group en WhiterutkiskaccsaNo ratings yet
- Logo Adle Onyourside Group en WhiteDocument1 pageLogo Adle Onyourside Group en WhiterutkiskaccsaNo ratings yet
- Staff Ot-En-Alde Rules of ProcedureDocument11 pagesStaff Ot-En-Alde Rules of ProcedurerutkiskaccsaNo ratings yet
- Logo Adle Onyourside Group en WhiteDocument1 pageLogo Adle Onyourside Group en WhiterutkiskaccsaNo ratings yet
- Staff Ot-En-Alde Rules of ProcedureDocument11 pagesStaff Ot-En-Alde Rules of ProcedurerutkiskaccsaNo ratings yet
- Lecture2 PDFDocument9 pagesLecture2 PDFrutkiskaccsaNo ratings yet
- Cla00007 0005Document4 pagesCla00007 0005rutkiskaccsaNo ratings yet
- Gorillaz - Rise of The Ogre PDFDocument306 pagesGorillaz - Rise of The Ogre PDFJhairPinzasMansilla94% (16)
- InstantColor Instructions - Pdf.downloadDocument1 pageInstantColor Instructions - Pdf.downloadrutkiskaccsaNo ratings yet