Professional Documents
Culture Documents
113 Лекција 03
Uploaded by
stepastepanoivcOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
113 Лекција 03
Uploaded by
stepastepanoivcCopyright:
Available Formats
Poglave 3
Vremenski odzivi sistema
3.1 Tipiqne promene ulaznih veliqina
Definicij a 3.1.1 Promena izlaza sistema u toku vremena, bilo da je izazvana dejstvom ulaza bilo
dejstvom poqetnih uslova, bilo dejstvom i ulaza i poqetnih uslova, je vremenski odziv sistema, ili
krae odziv sistema.
Odziv sistema je jedna od dinamiqkih karakteristika sistema. On je rezultat rada sistema i opisuje
taj rad. Odnosno, odziv sistema je rezultat prirode sistema, dejstva ulaza i poqetnih uslova (poqetnog
staa). On je spona reakcija sistema na ova dejstva.
Matematiqki posmatrano, odziv sistema je rexee diferencijalne jednaqine ponaxaa tog sistema za
zadatu promenu ulaza i zadate poqetne uslove.
Zahvaujui zakonu superpozicije, Odeak 3.2, koji vai za linearne sisteme, odzivi sistema na
sloene promene ulaznih veliqina, mogu da se dobiju jednostavnim sabiraem odziva na jednostavne,
tipiqne, promene ulaznih veliqina. Ova osobina linearnih sistema bitno pojednostavuje analizu
ihovog dinamiqkog ponaxaa.
Za upoznavae, utvrivae i analizu odziva linearnih sistema dovono je prouqiti ihove odzive
na odreene, tipiqne promene ulaza. Tri najqexe korixene ulazne veliqine za dinamiqku analizu
sistema su Hevisajdova ili odskoqna (u Matlabu step), Dirakova ili impulsna (impulse) i sinusna
fukcija (sin). Za sve tipiqe promene ulaznih veliqina je zajedniqko da su one do poqetnog trenutka
bile jednake nuli. Za poqetni trenutak se usvaja t
0
= 0, xto je opravdano poxto se prouqavaju samo
linearni stacionarni sistemi qije dinamiqko ponaxae ne zavisi od izbora poqetnog trenutka.
Da bi se prikazale razliqite tipiqne ulazne veliqine, kao i odgovarajui tipiqni vremenski odzivi
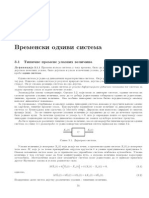
sistema sa slike 3.1 razmatrae se jedna konkretan mehaniqki sistem prikazan na slici 3.2.
S
- -
X
u
(t) X
i
(t)
Slika 3.1. Dijagram sistema.
Ulazna veliqina je pomerae X
u
(t) koja deluje na toqak, a vremenski odziv sistema X
i
(t) je pomerae
tela mase M, koje je za toqak priqvrxeno oprugom krutosti k i unim priguxivaqem priguxea b.
Ovakav mehaniqki sistem moe da se prihvati kao uproxee sistema ogibea automobila. Ulazna
veliqina u tom sluqaju moe da bude konfiguracija puta, a izlazna veliqina pomerae karoserije
automobila. Matematiqki model ovog mehaniqkog sistema moe jednostavno da se prikae primenom
drugog utnovog zakona i uslova ravnotee sila:
M
X
i
(t) +b
_
X
i
(t)
X
u
(t)
_
+k (X
i
(t) X
u
(t)) = 0, (3.1)
odnosno,
M
X
i
(t) +b
X
i
(t) +kX
i
(t) = kX
u
(t) +b
X
u
(t). (3.2)
Podvrgnimo dati sistem dejstvu razliqitih ulaznih - tipiqnih veliqina.
31
32 Poglave 3. Vremenski odzivi sistema
M
X t ( )
u
X
i
( ) t
b
k
Slika 3.2. Mehaniqki sistem.
h(t) - jediniqna odskoqna funkcija (Hevisajdova funkcija)
Ova funkcija je definisana izrazom (3.3), a en grafik je prikazan na slici 3.3.:
h(t)
_
_
= 0, t < 0,
_
0, 1
, t = 0,
= 1, t > 0.
(3.3)
6
-
0 t
h(t)
1
Slika 3.3. Jediniqna odskoqna funkcija (Hevisajdova funkcija).
Odziv sistema na ovakav ulaz, Hevisajdovu funkciju, naziva se jediniqni odskoqni odziv ili
prelazna funkcija i obeleava se sa g(t):
X
u
(t) = h(t) X
i
(t) = g(t).
Hevisajdova funkcija je vrlo znaqajna za odreivae pokazatea kvaliteta prelaznog procesa kao
i stacionarnih osobina sistema (pozicionog pojaqaa, pozicione statiqke grexke, ...). Prelazna
funkcija mehaniqkog sistema sa slike 3.2 je prikazana na slici 3.4.
0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
t[s]
X
u
(
t
)
h(t)
0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
t[s]
X
i
(
t
)
g(t)
Slika 3.4. Jediniqna odskoqna funkcija h(t) i prelazna funkcija g(t).
3.1. Tipiqne promene ulaznih veliqina 33
h
(t) - odskoqna funkcija
h
(t)
_
_
= 0, t < 0,
_
0,
, t = 0,
= , t > 0.
(3.4)
en grafik je prikazan na slici 3.5. Odziv sistema na odskoqnu funkciju se naziva odskoqni
6
-
0 t
h
(t)
Slika 3.5. Odskoqna funkcija.
odziv i obleava sa g
(t):
X
u
(t) = h
(t) = h(t) X
i
(t) = g
(t). (3.5)
Samo za linearne sisteme vai:
g
(t) = g(t). (3.6)
Ova osobina linearnih sistema moe da se vidi i uporeivaem prelaznih funkcija g(t) i g
(t)
razmatranog mehaniqkog sistema, koje su prikazane na slikama 3.4 i 3.6.
0 5 10 15 20
0
0.05
0.1
0.15
0.2
0.25
t[s]
X
u
(
t
)
h
0,2
(t)
0 5 10 15 20
0
0.05
0.1
0.15
0.2
0.25
t[s]
X
i
(
t
)
g
0,2
(t)
Slika 3.6. Odskoqna funkcija h
(t), za = 0, 2 i prelazna funkcija g
(t).
h
(t T
k
) - odskoqna funkcija sa kaxeem
h
(t T
k
)
_
_
= 0, t < T
k
,
_
0,
, t = T
k
,
= , t > T
k
.
(3.7)
en grafik je prikazan na slici 3.7, a tipiqna pobuda i odziv sistema (3.2) na slici 3.8.
6
-
0 t T
k
T
k
0, +
_
h
(t T
k
)
Slika 3.7. Odskoqna funkcija sa kaxeem.
34 Poglave 3. Vremenski odzivi sistema
0 5 10 15 20
0
0.05
0.1
0.15
0.2
0.25
t[s]
X
u
(
t
)
h
0,2
(t-3)
0 5 10 15 20
0
0.05
0.1
0.15
0.2
0.25
t[s]
X
i
(
t
)
X
i
(t)
Slika 3.8. Odskoqan funkcija sa kaxeem h
(t T
k
), za = 0, 2 i T
k
= 3s i odziv X
i
(t).
(t) - jediniqna impulsna funkcija (Dirakova funkcija)
Posmatraju se dve funkcije:
1
h(t) i
1
h(t ), slika 3.9. ihov algebarski zbir je:
-
6
-
6
1
0 t
1
h(t)
h(t )
1
0 t
Slika 3.9. Funkcije
1
h(t) i
1
h(t ) i ihov algebarski zbir.
h(t) h(t )
,
a jediniqna impulsna funkcija, Dirakova funkcija, je definisana relacijom:
(t) = lim
0
+
h(t) h(t )
. (3.8)
Geometrijska interpretacija Dirakove funkcije je prikazana na desnoj slici slike 3.9. S obzirom
da se radi o graniqnoj vrednosti kada se beskonaqno smauje, onda puls, pravougaonik stranica
i
1
, postaje impuls. Povrxina tog impulsa je, kao i povrxina pulsa, P =
1
= 1, pa se zato
ova funkcija koja je u nuli beskonaqnog intenziteta (ne jediniqnog) naziva jediniqna impulsna
funkcija.
Samim tim Dirakova funkcija ima osobinu da je
_
+
(t)dt =
_
0
+
0
(t)dt = 1, (0) = +, (t) = 0, (t = 0)
, +
_
.
Odziv sistema na Dirakovu funkciju je takoe tipiqan (poxto je ulaz tipiqan i odziv je tipiqan)
i naziva se jediniqni impulsni odziv i obeleava sa i(t).
X
u
(t) = (t) X
i
(t) = i(t).
Na slici 3.10 je prikazan odziv i(t) razmatranog mehaniqkog sistema izazvan Dirakovom pobudom
(korak integracije je dt = = 0, 001, visina pulsa je
1
= 1000 P = 1).
3.1. Tipiqne promene ulaznih veliqina 35
0 5 10 15 20
0
100
200
300
400
500
600
700
800
900
1000
1100
t[s]
X
u
(
t
)
(t)
1 0 1 2 3 4
x 10
3
0
100
200
300
400
500
600
700
800
900
1000
1100
t[s]
X
u
(
t
)
(t)
0 5 10 15
0.2
0
0.2
0.4
0.6
0.8
t[s]
X
i
(
t
)
i(t)
Slika 3.10. Jediniqna impulsna funkcija (t) i jediniqni impulsni odziv i(t).
n(t) - nagibna funkcija
Analitiqki opis nagibne funkcije, n(t), je:
n(t) =
_
0, t < 0,
t, t 0, R,
(3.9)
xto moe da se napixe u kraem obliku
n(t) = th(t). (3.10)
Funkcija t se mnoi sa funkcijom h(t) da bi nagibna funkcija n(t) bila jednaka nuli za t < 0.
Grafik nagibne funkcije n(t) je prikazan na slici 3.11. Odziv sistema na nagibni ulaz je nagibni
6
-
0 t
n(t)
Slika 3.11. Nagibna funkcija.
odziv, xto je za razmatrani sistem prikazano na slici 3.12.
0 5 10 15 20
0
5
10
15
t[s]
X
u
(
t
)
n(t)
0 5 10 15 20
0
5
10
15
t[s]
X
i
(
t
)
X
i
(t)
Slika 3.12. Nagibna funkcija za = 0, 7 i nagibni odziv.
36 Poglave 3. Vremenski odzivi sistema
e(t) - eksponencijalna funkcija
Eksponencijalna funkcija, oznaqena sa e(t), je definisana sa:
e(t)
_
_
= 0, t < 0,
_
0,
, t = 0,
= e
t
, t > 0.
(3.11)
Ovo moe da se krae napixe sa:
e(t) = e
t
h(t). (3.12)
Grafik eksponencijalne funkcije je prikazan na slici 3.13 za
0, +
_
. Odziv sistema na
6
-
0 t
e(t)
> 0
= 0
< 0
Slika 3.13. Eksponencijalna funkcija.
eksponencijalnu promenu ulaza se naziva eksponencijalni odziv. Simulacioni rezultati za
sistem ogibea automobila su prikazani na slici 3.14.
0 5 10 15 20
0
0.5
1
1.5
2
t[s]
X
u
(
t
)
e(t)
0 5 10 15 20
0
0.5
1
1.5
2
t[s]
X
i
(
t
)
X
i
(t)
Slika 3.14. Eksponencijalna pobuda e(t) = e
t
, za = 2 i = 0, 4 i eksponencijalni odziv.
s(t) - sinusna funkcija
Sinusna funkcija, oznaqena sa s(t), definisana je sa:
s(t)
_
_
= 0, t < 0,
_
0, sin
, t = 0,
= sin (t +), t > 0.
(3.13)
xto moe da se same u oblik:
s(t) = h(t) sin (t +), (3.14)
a en grafik je prikazan na slici 3.15.
Odziv sistema na sinusnu promenu ulazne veliqine se naziva sinusni odziv, a te veliqine za
sluqaj mehaniqkog sistema sa strane 31 su grafiqki prikazane na slici 3.16.
3.2. Zakon superpozicije 37
6
-
0 t
s(t)
b b
Slika 3.15. Sinusna funkcija.
0 10 20 30 40 50 60 70
1.5
1
0.5
0
0.5
1
1.5
t[s]
X
u
(
t
)
s(t)
0 10 20 30 40 50 60 70
1.5
1
0.5
0
0.5
1
1.5
t[s]
X
i
(
t
)
X
i
(t)
Slika 3.16. Sinusna pobuda s(t) = sin(t +), za = 1, 5, = 0, 1 i = 0, 7 i sinusni odziv.
3.2 Zakon superpozicije
Jedna od najvanijih osobina koju imaju linearni sistemi je da za ih vai zakon superpozicije, xta
vixe oni su tako i definisani, tj. neki sistem jeste linearan ako za ega vai zakon superpozicije.
Ilustrujmo to na jednom primeru pre nego xto taj zakon egzaktno iskaemo. Posmatra se jedan
jednostruko prenosni sistem, tj. sistem koji ima jednu ulaznu i jednu izlaznu veliqinu, slika 3.17.
S
- -
X
u
X
i
Slika 3.17. Jednostruko prenosni sistem.
Utvrivae osobine linearnosti odziva sistema moe da se objasni izvoeem sledea tri ekspe-
rimenta ili simulacije (izloeni rezultati su simulacioni):
Sistem se pobuuje proizvonom ulaznom veliqinom, npr. jediniqnom odskoqnom funkcijom sa
kaxeem X
u
= h(t 5). Oznaqimo ovakvu promenu ulazne veliqine sa X
u1
(ulazna veliqina X
u
u
prvom eksperimentu ili simulaciji). Odziv razmatranog sistema na takvu pobudu X
i
(X
u1
), oznaqen
sa X
i1
, pri nultim poqetnim uslovima je prikazan na slici 3.18.
U drugom eksperimentu ili simulaciji, pobudimo sistem nekom drugom proizvonom ulaznom
veliqinom, npr. sinusnom funkcijom X
u
= sin(0, 5t), i oznaqimo takvu promenu sa X
u2
. Sinusni
odziv sistema, X
i
(X
u2
) oznaqen sa X
i2
, pri nultim poqetnim uslovima prikazan je na slici 3.19.
Na kraju, sistem se pobuuje ulaznom veliqinom koja je jednaka ponderisanom zbiru ulaznih
veliqina iz prva dva eksperimenta, tj. simulacije:
X
u
=
1
X
u1
+
2
X
u2
,
pri qemu su za
1
i
2
usvojene sledee vrednosti
1
= 0, 7
2
= 1, 2.
38 Poglave 3. Vremenski odzivi sistema
0 5 10 15 20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
X
u1
= h(t 5)
0 5 10 15 20
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
X
i1
Slika 3.18. Odziv sistema na X
u1
= h(t 5).
0 5 10 15 20
3
2
1
0
1
2
3
X
u2
= sin(0, 5 t)
0 5 10 15 20
3
2
1
0
1
2
3
X
i2
Slika 3.19. Odziv sistema na X
u2
= sin(0, 5 t).
0 5 10 15 20
1
0
1
2
3
4
5
6
X
u
=
1
X
u1
+
2
X
u2
0 5 10 15 20
1
0
1
2
3
4
5
6
X
i
= X
i
(
1
X
u1
+
2
X
u2
)
0 5 10 15 20
1
0
1
2
3
4
5
6
X
i
=
1
X
i1
+
2
X
i2
Slika 3.20: Odziv sistema na X
u
=
1
X
u1
+
2
X
u2
= 0, 7 h(t 5) + 1, 2 sin(0, 5 t) i zbir odziva X
i
=
1
X
i1
+
2
X
i2
= 0, 7 X
i1
+ 1, 2 X
i2
.
Dobijeni odziv sistema na taj sloeni ulaz je prikazan na sredoj slici (crvena kriva) slike 3.20.
Tako dobijeni odziv se uporeuje sa ponderisanim (na isti naqin
1
= 0, 7,
2
= 1, 2) zbirom
partikularnih odziva X
i1
iz prve simulacije i X
i2
iz druge simulacije. Takav zbir je prikazan
na desnoj slici (zelena kriva) slike 3.20.
Ako su ta dva odziva:
X
i
= X
i
(X
u
) = X
i
(
1
X
u1
+
2
X
u2
)
3.3. Pokazatei kvaliteta prelazne funkcije upravanog objekta 39
i
X
i
=
1
X
i
(X
u1
) +
2
X
i
(X
u2
) =
1
X
i1
+
2
X
i2
jednaka, i ako to vai za bilo koje X
u
iz prvog eksperimenta (X
u1
), bilo koje X
u
iz drugog
eksperimenta (X
u2
), bilo koje
1
i
2
, onda za odziv tog sistema vai zakon superpozicije.
Ako se razmatra vixestruko prenosni sistem: sistem qiji je zbir broja ulaznih i broja izlaznih
veliqina M +N > 2, slika 3.21, onda zakon superpozicije moe da se iskae u opxtem sluqaju.
- -
- -
- -
X
u1
X
u2
.
.
.
X
uM
X
i1
X
i2
.
.
.
X
iN
S
Slika 3.21. Vixestruko prenosni sistem.
Definicij a 3.2.1 Za odziv sistema S, slika 3.21, vai zakon superpozicije ako i samo ako vai:
X
i
(
1
X
u1
+
2
X
u2
)
1
X
i
(X
u1
) +
2
X
i
(X
u2
). (3.15)
Identitet u (3.15) iskazuje da taj izraz vai za bilo koju kombinaciju ulaznih veliqina X
ui
, i =
1, 2, . . . , M, u okviru vektora X
u1
i X
u2
:
X
u1
=
_
_
_
_
_
X
u1
X
u2
.
.
.
X
uM
_
_
_
_
_
i X
u2
=
_
_
_
_
_
X
u1
X
u2
.
.
.
X
uM
_
_
_
_
_
i za bilo koje realne brojeve
1
i
2
, tj. identitet(3.15) moe da se prikae sledeom jednaqinom:
X
i
(
1
X
u1
+
2
X
u2
) =
1
X
i
(X
u1
) +
2
X
i
(X
u2
), (
1
,
2
, X
u1
, X
u2
) RRR
M
R
M
. (3.16)
Sistem S, slika 3.21, za qiji odziv vai zakon superpozicije je izlazno linearan. To ne znaqi da
je sistem (kompletno) linearan. U narednim poglavima e biti pokazano da je za linearnost sistema
potrebno da zakon superpozicije vai i za odziv i za kretae sistema.
3.3 Pokazatei kvaliteta prelazne funkcije upravanog objekta
Osnovni zadatak objekta je da u nominalnim uslovima svog rada ostvari zahtevano dinamiqko ponaxae,
koje je opisano eenom promenom totalne vrednosti egove izlazne veliqine, u oznaci X
i
(t).
U promenivim uslovima rada objekta zahteva se da egovo stvarno dinamiqko ponaxae bude do-
vono blisko egovom eenom dinamiqkom ponaxau. Drugim reqima, razlika (t) izmeu eenog
(X
i
(t)) i stvarnog (X
i
(t)) dinamiqkog ponaxaa objekta treba da bude u odreenim granicama (po-
drazumeva se da su intenziteti poremeaja u granicama za koje je dati objekt konstruisan).
Grexka izlazne veliqine objekta je definisana sa
(t) = X
i
(t) X
i
(t).
Razlika izmeu stvarnog dinamiqkog ponaxaa objekta i egovog eenog dinamiqkog ponaxaa je
odstupae x
i
(t) izlazne veliqine tog objekta:
x
i
(t) = X
i
(t) X
i
(t), x
i
(t) = (t).
Velika slova (npr. X
i
) oznaqavaju totalne vrednosti veliqina koje se mere u odnosu na totalnu nulu.
Mala slova (npr. x
i
) oznaqavaju odstupaa.
Da bi se definisala zahtevana bliskost stvarnog dinamiqkog ponaxaa objekta egovom eenom
ponaxau, tj. da bi se definisala dozvoena grexka (t) egove izlazne veliqine, definixu se osnovni
pokazatei kvaliteta dinamiqkog ponaxaa, koji su prikazani na slici 3.22.
40 Poglave 3. Vremenski odzivi sistema
-
6
6
?
d
X
i
(t) = g(t)
d 0
1
t
() x
i
()
?
6
X
i
(t) = h(t)
+
X
i
(t)
u
6
K
6
?
s
?
6
a
m
Slika 3.22. Prelazna funkcija objekta.
- preskok, predstava razliku vrednosti prvog maksimuma prelazne funkcije i ene vrednosti u
stacionarnom stau. Preskok se izraava u procentima od graniqne vrednosti prelazne funkcije
kada t +, tj. u procentima od pozicionog pojaqaa: =
g(
d
) K
K
100%. Ovaj pokazate je
mera stepena relativne stabilnosti sistema.
d
- dinamiqka grexka izlazne veliqine, grexka koja se java u trenutku pojave preskoka
d
= (
d
).
d
- trenutak pojavivaa dinamiqke grexke (preskoka).
u
- vreme uspona je vreme koje je potrebno da prelazna funkcija od 10% dostigne 90% od svoje vredno-
sti u stacionarnom reimu kod aperiodiqnih odziva, a u sluqaju oscilatornog odziva, kao xto je
na slici 3.22, od 0% do 100% stacionarne vrednosti. Vrednost vremena uspona karakterixe pored
brzine odziva i sposobnost sistema da na svom izlazu xto vernije reprodukuje ulazne signale.
Pri tome duem vremenu uspona odgovara vee izobliqee u prenosu signala.
s
- vreme smirea je prvi trenutak kada prelazna funkcija ue i vixe ne izlazi iz unapred utvrenog
opsega
m
oko vrednosti u stacionarnom stau. Posle tog trenutka moe da se kae da je prelazni
proces praktiqno ixqezao, bar xto se taqnosti tiqe.
|X
i
(t) X
i
(+)|
m
, t
s
.
m
- najvea (maksimalna) dozvoena apsolutna vrednost odstupaa prelazne funkcije od ene vred-
nosti u stacionarnom reimu posle trenutka
s
. Ta vrednost je najqexe 2 ili 5% od vrednosti
prelazne funkcije u stacionarnom radnom reimu.
K - pojaqae (poziciono) je graniqna vrednost prelazne funkcije g(t) objekta, ako ta graniqna vred-
nost postoji:
K = lim
t+
g(t).
s
- statiqka grexka (poziciona) je graniqna vrednost grexke izlazne veliqine objekta, ako ta gra-
niqna vrednost postoji:
s
= lim
t+
(t).
3.3. Pokazatei kvaliteta prelazne funkcije upravanog objekta 41
Napomena: Svi prethodno definisani pokazatei kvaliteta prelaznog procesa su dati u odnosu na
g(t), tj. kada je sistem pobuen jediniqnom odskoqnom funkcijom h(t). U sluqaju da je sistem pobuen
odskoqnom funkcijom h
(t), gde je = 1, onda treba imati u vidu da su vrednosti odziva g
(t), u bilo
kom trenutku t, puta vee od vrednosti g(t), tj.
g
(t) = g(t), t R.
U tom sluqaju je npr. pojaqae, definisano u najopxtijem smislu sa:
K = lim
t+
g
(t)
h
(t)
= lim
t+
g
(t)
h(t)
= lim
t+
g
(t)
= lim
t+
g(t)
= lim
t+
g(t),
jednako koliqniku vrednosti prelazne funkcije u beskonaqnosti i vrednosti odskoqne funkcije u
beskonaqnosti:
K =
g
(+)
h
(+)
=
g
(+)
.
Sliqne relacije vae i za ostale pokazatee. Zato, da ne bi doxlo do neeenih grexaka u odreivau
pojedinih pokazatea najjednostavniji naqin je da se g
(t) svede na g(t), deleem sa .
Neupravani objekt ne moe sam po sebi da ostvari sve eene pokazatee. To je osnovni razlog da
se objekt uprava, odnosno da se on spregne sa upravaqkim sistemom u sistem automatskog upravaa.
Zadatak upravaqkog sistema, tj. upravaa je da svojim dejstvom na objekt primora taj objekt da
ostvari zahtevane vrednosti svih navedenih pokazatea.
Primer 15
Korixee Matlaba za odreivae pokazatea kvaliteta prelazne funkcije upravanog objekta, moe
da se ilustruje sledeim skriptom (Pokazatelji.m).
Listing 3.1. Pokazatelji.m
1 c l e a r ; pack; c l o s e a l l ; c l c
2 dt = 0.001;
3 t = 0:dt:6;
4 % matematichki model objekta
5 num = [0 0 12];
6 den = conv ([1 1+3*i], [1 1-3*i]);
7 W = tf(num , den)
8 % prelazna funkcija objekta
9 [g, t] = step(W, t);
10 pok = f i g u r e (1);
11 s e t (pok , Position , [100 100 600 300])
12 pl ot (t, g, LineWidth , 1.2); gr i d; hol d on
13 xl abe l (t [s]);
14 yl abe l (g(t));
15
16 % vrednost izlaza u stacionarnom stanju pojachanje
17 K = num(end)/den(end)
18 pl ot ([t(1) t(end)], [g(end) g(end)], g--);
19
20 % vreme uspona
21 ru = min( f i nd (g > K)) - 1;
22 vreme_uspona = t(ru)
23 pl ot ([t(ru) t(ru)], [g(1) g(ru)], k, LineWidth , 0.1);
24 t ext (t(ru), g(1) -0.05*K, \tau_u , Color , r)
25
26 % vreme smirenja za 2%
27 r = l engt h (t);
28 whi l e g(r) >= 0.98*K & g(r) <= 1.02*K;
29 r = r - 1;
30 end
31 rs = r + 1;
32 vreme_smirenja = t(rs)
33 em = g(rs) - K
34 pl ot ([t(rs) t(end)], [K+em K+em], m);
35 pl ot ([t(rs) t(end)], [K-em K-em], m);
36 pl ot ([t(rs) t(rs)], [g(1) g(rs)], k, LineWidth , 0.1);
37 t ext (t(rs), g(1) -0.05*K, \tau_s , Color , r)
38
42 Poglave 3. Vremenski odzivi sistema
39 % preskok
40 [g_max , rp] = max(g);
41 vreme_preskoka = t(rp)
42 preskok = g_max - K
43 preskok = (g_max - K)/K * 100 % preskok u procentima
44 pl ot ([t(rp) t(rp)], [g(1) g(rp)], k, LineWidth , 0.1);
45 t ext (t(rp), g(1) -0.05*K, \tau_d , Color , r)
46
47 % statichka greshka
48 eps_s = 1 - K
Dobijeni rezulati su prikazani narednim linijama iz Matlab prozora i slikom 3.23.
0 1 2 3 4 5 6
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
t [s]
g
(
t
)
u
s
d
Slika 3.23. Prelazna funkcija objekta W
o
(s) =
12
s
2
+ 2s + 10
.
K = 1.2000
vreme_uspona = 0.6300
vreme_smirenja = 3.5360
em = 0.0240
vreme_preskoka = 1.0470
preskok = 0,4211
preskok = 35.0920 % preskok u procentima
eps_s = -0.2000
You might also like
- Lab1 - Tehnologija Masinske ObradeDocument6 pagesLab1 - Tehnologija Masinske ObradeSanjichak_No ratings yet
- 112 Лекција 02Document22 pages112 Лекција 02stepastepanoivcNo ratings yet
- 113 Лекција 03Document12 pages113 Лекција 03stepastepanoivcNo ratings yet
- 110 Презентација 01Document19 pages110 Презентација 01stepastepanoivcNo ratings yet
- 112 Лекција 02Document22 pages112 Лекција 02stepastepanoivcNo ratings yet
- Pismeni b1Document2 pagesPismeni b1stepastepanoivcNo ratings yet