You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Advertising Experiments at The Ohio Art CompanyDocument4 pagesAdvertising Experiments at The Ohio Art CompanyDaniel Hanry Sitompul33% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Implementation Details and Examples: Variable-Length Entropy Encoding Lossless Data CompressionDocument26 pagesImplementation Details and Examples: Variable-Length Entropy Encoding Lossless Data CompressionAayush SharmaNo ratings yet
- PT Gajah Tunggal TBK GJTLDocument3 pagesPT Gajah Tunggal TBK GJTLDaniel Hanry SitompulNo ratings yet
- Financial Statements2014 Lotte ChemicalDocument95 pagesFinancial Statements2014 Lotte ChemicalDaniel Hanry SitompulNo ratings yet
- Clique Pens: The Writing Implements Division of Us HomeDocument6 pagesClique Pens: The Writing Implements Division of Us HomeDaniel Hanry SitompulNo ratings yet
- Low Strain IntegrityDocument2 pagesLow Strain IntegrityDaniel Hanry SitompulNo ratings yet
- Lecture00 Lecture ScheduleDocument2 pagesLecture00 Lecture ScheduleDaniel Hanry SitompulNo ratings yet
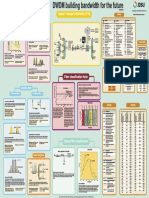
- DWDM Impairments Optical Transport Networks (OTN) : Linear EffectsDocument1 pageDWDM Impairments Optical Transport Networks (OTN) : Linear Effectskapil dev pandeyNo ratings yet
- Waiver of Rights and Interest-Shares of StockDocument2 pagesWaiver of Rights and Interest-Shares of StockJake FuentesNo ratings yet
- Bundelkhand University, Jhansi B. Tech. (Food Tech.) I SemesterDocument51 pagesBundelkhand University, Jhansi B. Tech. (Food Tech.) I SemesterAnupNo ratings yet
- EC404 - Monsoon 2016 Archana Aggarwal Introduction To Statistics and Econometrics 307, SSS-II Problem Set 1Document4 pagesEC404 - Monsoon 2016 Archana Aggarwal Introduction To Statistics and Econometrics 307, SSS-II Problem Set 1Tania SahaNo ratings yet
- Amontec Jtagkey Flyer Pinout PDFDocument1 pageAmontec Jtagkey Flyer Pinout PDFAjayNo ratings yet
- Apartment Management SystemDocument3 pagesApartment Management SystemMarvin SibugNo ratings yet
- Optiplex 3080 Spec SheetDocument7 pagesOptiplex 3080 Spec SheetĐộ Quách ThànhNo ratings yet
- Ben Ten All Aliens - Google SearchDocument1 pageBen Ten All Aliens - Google SearchKhizar HayatNo ratings yet
- ICT For ESPDocument9 pagesICT For ESPAkhmad Yani Part IINo ratings yet
- Skyhaven Flying Club Cirrus Flight Operations Manual v3.0Document14 pagesSkyhaven Flying Club Cirrus Flight Operations Manual v3.0Dan HeeterNo ratings yet
- LED Headlight Fog Light Kit Catalog by Per-Accurate Inc (20101110)Document21 pagesLED Headlight Fog Light Kit Catalog by Per-Accurate Inc (20101110)dachunchanNo ratings yet
- Mainframes RefresherDocument285 pagesMainframes Refreshergspraju100% (1)
- 2PAA111695-610 A en System 800xa 5.0 SP2 To 6.1 UpgradeDocument286 pages2PAA111695-610 A en System 800xa 5.0 SP2 To 6.1 Upgradeershivkumar2002No ratings yet
- Mutoh SC Manual PDFDocument120 pagesMutoh SC Manual PDFadolgonzaNo ratings yet
- AWS Technical Essentials: Course DescriptionDocument3 pagesAWS Technical Essentials: Course DescriptionEriNo ratings yet
- BSNL Summer TrainingDocument24 pagesBSNL Summer TrainingpushpNo ratings yet
- Mastering Power ShellDocument567 pagesMastering Power ShellNoorzafar100% (1)
- GEH-6721 Vol IIDocument1,166 pagesGEH-6721 Vol IIvishnu ramkaranNo ratings yet
- CB19442 DTDocument1 pageCB19442 DTbhuvangates0% (1)
- Software EngineeringDocument75 pagesSoftware EngineeringGolu MishraNo ratings yet
- 2011 0079 Jobbagy BiomedicalDocument257 pages2011 0079 Jobbagy BiomedicalTan Huynh50% (2)
- Test Bank For Modern Database Management 11 e 11th Edition Jeffrey A Hoffer V Ramesh Heikki TopiDocument25 pagesTest Bank For Modern Database Management 11 e 11th Edition Jeffrey A Hoffer V Ramesh Heikki TopiMaryJohnsonafrz100% (47)
- Burger King Vs McDonalds Final Paper 1Document12 pagesBurger King Vs McDonalds Final Paper 1PushkarNo ratings yet
- Computer ProjectDocument36 pagesComputer ProjectDiganta PalNo ratings yet
- Getting Started With Javafx Scene Builder Release 2.0Document52 pagesGetting Started With Javafx Scene Builder Release 2.0Alias RoberNo ratings yet
- Uon Ict PolicyDocument61 pagesUon Ict PolicySeth OdwarNo ratings yet
- SS7 TutorialDocument32 pagesSS7 Tutorialasrarfarhan2003No ratings yet
- 18S Section SolutionDocument4 pages18S Section SolutionKhatia IvanovaNo ratings yet
- 1982 Linear Switchmode Voltage Regulator Handbook PDFDocument398 pages1982 Linear Switchmode Voltage Regulator Handbook PDFAnonymous wKUMwA100% (1)