You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Problem # 1: 70 Deg 311 Kpa 850 C 100 Kpa 0.87 500 M/SDocument24 pagesProblem # 1: 70 Deg 311 Kpa 850 C 100 Kpa 0.87 500 M/Sinam vfNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- CL420 Water Engineering 2 H41 GVF LabDocument17 pagesCL420 Water Engineering 2 H41 GVF LabDavid Thomson0% (1)
- Lesson 2 - G8 Circular MotionDocument3 pagesLesson 2 - G8 Circular MotionJonnel RoqueNo ratings yet
- Dokumen - Tips Chapter 7 Compressible FlowDocument74 pagesDokumen - Tips Chapter 7 Compressible Flowinam vfNo ratings yet
- Co-Flow Jet (CFJ) Airfoils Practicality in Engineless AirplanesDocument25 pagesCo-Flow Jet (CFJ) Airfoils Practicality in Engineless Airplanesinam vfNo ratings yet
- Laws of ThermodynamicsDocument25 pagesLaws of Thermodynamicsinam vfNo ratings yet
- Symmetry & Odd/Even Functions: Example 1: Test The Relation 2y X + 3 For Symmetry About Both The Coordinate AxesDocument4 pagesSymmetry & Odd/Even Functions: Example 1: Test The Relation 2y X + 3 For Symmetry About Both The Coordinate Axesinam vfNo ratings yet
- Lec 20pptsDocument27 pagesLec 20pptsinam vfNo ratings yet
- Read The Following Passage CarefullyDocument5 pagesRead The Following Passage Carefullyinam vfNo ratings yet
- Unit 4 Flow Through NozzlesDocument55 pagesUnit 4 Flow Through Nozzlesinam vfNo ratings yet
- Transonic Axial Compressor Active Boundary Layer Control Concept and Its EvaluationDocument8 pagesTransonic Axial Compressor Active Boundary Layer Control Concept and Its Evaluationinam vfNo ratings yet
- Project No. 1 Computational Modeling of A Typical Supersonic Converging-Diverging NozzleDocument2 pagesProject No. 1 Computational Modeling of A Typical Supersonic Converging-Diverging Nozzleinam vfNo ratings yet
- Laboratory Will Complement An Advanced Fluid Mechanics CourseDocument5 pagesLaboratory Will Complement An Advanced Fluid Mechanics Courseinam vfNo ratings yet
- 3 Wind Energy CH 3Document47 pages3 Wind Energy CH 3mohit pawarNo ratings yet
- DAihatsu Hijet Brochure CB EngineDocument6 pagesDAihatsu Hijet Brochure CB EngineErnielle Rae Dela Cruz100% (1)
- 2000405-R06 - Lap JointDocument5 pages2000405-R06 - Lap JointMrityunjoy BarNo ratings yet
- Id FD PaDocument17 pagesId FD PaSara LopezNo ratings yet
- PBV 3pc Trunnion 2015Document32 pagesPBV 3pc Trunnion 2015Uday GokhaleNo ratings yet
- Assembly Manual - YX300 2016 PDFDocument25 pagesAssembly Manual - YX300 2016 PDFВладимир ПантилейкинNo ratings yet
- Elm327 PDFDocument1 pageElm327 PDFAmeer AbdoNo ratings yet
- Sawan Kumar Rawat, Himanshu Upreti, Manoj KumarDocument20 pagesSawan Kumar Rawat, Himanshu Upreti, Manoj KumarShafqat HussainNo ratings yet
- 8.1-8.2 HWDocument9 pages8.1-8.2 HWADVITH CHEGU100% (1)
- Engr. Marabelle R. Del PradoDocument14 pagesEngr. Marabelle R. Del PradoArin ParkNo ratings yet
- Hole-Drilling Method For Measuring Residual Stresses-V1 PDFDocument188 pagesHole-Drilling Method For Measuring Residual Stresses-V1 PDFsumatrablackcoffee453100% (1)
- CH 08 CDocument30 pagesCH 08 CAnonymous ncBe0B9bNo ratings yet
- Thermo EXAMPLE-CHAPTER 5 PDFDocument30 pagesThermo EXAMPLE-CHAPTER 5 PDFFattihiEkhmalNo ratings yet
- 3299-LI-300-FLA (OS&Y Gate Valve) ..Document1 page3299-LI-300-FLA (OS&Y Gate Valve) ..Rudiyansyah RudiyansyahNo ratings yet
- Copper Alloy C83600Document12 pagesCopper Alloy C83600guardmob-1No ratings yet
- The Design of Bullet Train Process Bogie and The Finite Element Analysis of Frame StrengthDocument6 pagesThe Design of Bullet Train Process Bogie and The Finite Element Analysis of Frame StrengthMariano SerranoNo ratings yet
- ELEC Calcium Pending PR & StockDocument10 pagesELEC Calcium Pending PR & StockBorno ShahinNo ratings yet
- Dynamic Plate Loading TestDocument19 pagesDynamic Plate Loading TestVasaNo ratings yet
- Introduction To The Second Law: H.C. Van Ness (Understanding Thermodynamics)Document30 pagesIntroduction To The Second Law: H.C. Van Ness (Understanding Thermodynamics)julio cesarNo ratings yet
- ThermocoupleDocument8 pagesThermocoupleGustavo Palacios100% (1)
- IS 6938 (2005) - Design of Rope Drum and Chain Hoists For Hydraulic Gates - Code of PracticeDocument16 pagesIS 6938 (2005) - Design of Rope Drum and Chain Hoists For Hydraulic Gates - Code of PracticeSuleman KhanNo ratings yet
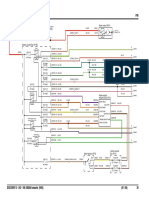
- Electronic Engine ControlsDocument6 pagesElectronic Engine ControlstuningNo ratings yet
- Caustic Soda Mix Tank PsDocument2 pagesCaustic Soda Mix Tank PsDaniel Pandapotan MarpaungNo ratings yet
- Chapter 4 Engine SimulationDocument18 pagesChapter 4 Engine SimulationNguyen Trong NhanNo ratings yet
- Precision Accurate: Empowering With SolutionsDocument8 pagesPrecision Accurate: Empowering With SolutionsMohammed KhalidNo ratings yet
- C033407 enDocument3 pagesC033407 enmelgarcia829No ratings yet
- Basics of Industrial Maintenance (Schoolcraft Publishing)Document7 pagesBasics of Industrial Maintenance (Schoolcraft Publishing)rfgerfgNo ratings yet