You might also like
- Deber Recuperación FormulaciónDocument6 pagesDeber Recuperación FormulaciónDe2791ViNo ratings yet
- Práctica 9 IMPRIMIRDocument15 pagesPráctica 9 IMPRIMIRDe2791ViNo ratings yet
- Practik6-Interrupciones y Temporizadores en Lenguaje CDocument14 pagesPractik6-Interrupciones y Temporizadores en Lenguaje CDe2791ViNo ratings yet
- Eeprom y Contadores de Dos DígitosDocument16 pagesEeprom y Contadores de Dos DígitosDe2791ViNo ratings yet
- Proyecto Fundamentos de REDDocument29 pagesProyecto Fundamentos de REDDe2791ViNo ratings yet
- Ejercicios Ley de Proporciones, Isótopos y FormulaciónDocument2 pagesEjercicios Ley de Proporciones, Isótopos y FormulaciónDe2791ViNo ratings yet
- Deber Recuperación FormulaciónDocument6 pagesDeber Recuperación FormulaciónDe2791ViNo ratings yet
- Tarea Rendimiento, Reactivo Limitante y en Exceso, Formulación Mínima y Molecular, ConversionesDocument1 pageTarea Rendimiento, Reactivo Limitante y en Exceso, Formulación Mínima y Molecular, ConversionesDe2791ViNo ratings yet
- Valencias o Número de Oxidación de Los Elementos Más ComunesDocument1 pageValencias o Número de Oxidación de Los Elementos Más ComunesDe2791ViNo ratings yet
- Equivalente Eléctrico de CalorDocument7 pagesEquivalente Eléctrico de CalorDe2791Vi67% (3)
- Reciclaje de ComponentesDocument5 pagesReciclaje de ComponentesDe2791ViNo ratings yet
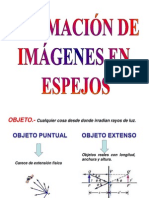
- EspejosDocument52 pagesEspejosDe2791Vi100% (1)
- Práctica de Laboratorio InductanciaDocument10 pagesPráctica de Laboratorio InductanciaDe2791Vi0% (1)
- Práctica de Laboratorio Proyección en Cuerpos ÓpacosDocument7 pagesPráctica de Laboratorio Proyección en Cuerpos ÓpacosDe2791ViNo ratings yet
- Práctica de Laboratorio Espejos de FresnelDocument6 pagesPráctica de Laboratorio Espejos de FresnelDe2791ViNo ratings yet
- Práctica de Laboratorio CapacitanciaDocument7 pagesPráctica de Laboratorio CapacitanciaDe2791ViNo ratings yet
- Ley de OhmDocument8 pagesLey de OhmDe2791Vi100% (1)
- Calendario en LíneaDocument6 pagesCalendario en LíneaDe2791ViNo ratings yet
- Introducción A La ElectricidadDocument7 pagesIntroducción A La ElectricidadDe2791ViNo ratings yet
- TitulaciónDocument11 pagesTitulaciónDe2791ViNo ratings yet
- Campo y Potencial EléctricoDocument8 pagesCampo y Potencial EléctricoDe2791ViNo ratings yet
- Descomposición Térmica de Sales y Determinación EstequiométricaDocument4 pagesDescomposición Térmica de Sales y Determinación EstequiométricaDe2791Vi100% (1)
- Calendario en LíneaDocument6 pagesCalendario en LíneaDe2791ViNo ratings yet
- Gráficos en Excel - Gráfico de ÁreaDocument7 pagesGráficos en Excel - Gráfico de ÁreaDe2791ViNo ratings yet
- Calendario en LíneaDocument6 pagesCalendario en LíneaDe2791ViNo ratings yet
- Calidad 2Document10 pagesCalidad 2Mayra nicol Alvarez sangayNo ratings yet
- 173432-Examen Tecnología Industrial (2021)Document4 pages173432-Examen Tecnología Industrial (2021)juanmelladodiaz1825No ratings yet
- Diplomado en Food Design Thinking Jul 2019-1-2Document9 pagesDiplomado en Food Design Thinking Jul 2019-1-2Isai Lopez MonjioteNo ratings yet
- Guía de Problemas de Física PDFDocument75 pagesGuía de Problemas de Física PDFoblicuos51% (74)
- Encuesta para Construcción de MensajeDocument28 pagesEncuesta para Construcción de MensajeAlfonso RamosNo ratings yet
- Cotizacion Pic29-1120183 Lloinko Constructora S.A.C.Document1 pageCotizacion Pic29-1120183 Lloinko Constructora S.A.C.Kennet Edyson Mamani ZeaNo ratings yet
- Arde Con LluviaDocument17 pagesArde Con LluviaFrancisca AriasNo ratings yet
- Breve Reseña Historica de La Sismologia en VenezuelaDocument1 pageBreve Reseña Historica de La Sismologia en VenezuelaAndrésNo ratings yet
- 3 Corrección Del Ejercicio - Proper Nouns PDFDocument4 pages3 Corrección Del Ejercicio - Proper Nouns PDFDavid FernandoNo ratings yet
- NORMA Oficial Mexicana NOM-008 Sistema General de Unidades de Medida (Resumen)Document1 pageNORMA Oficial Mexicana NOM-008 Sistema General de Unidades de Medida (Resumen)Tareas RápidasNo ratings yet
- Sofia Vega SP IDocument29 pagesSofia Vega SP ISofia Isabel Vega GonzalezNo ratings yet
- Fundamentos filosóficos y epistemológicos de la psicologíaDocument61 pagesFundamentos filosóficos y epistemológicos de la psicologíaMahily Sabando DemeraNo ratings yet
- Ejercicios Cambiado EnunciadoDocument15 pagesEjercicios Cambiado EnunciadoSandra Portal0% (1)
- Orientaciones técnicas para la educación inclusivaDocument301 pagesOrientaciones técnicas para la educación inclusivaALEXANDRA ARIAS VALDERRAMANo ratings yet
- Entrevista - Daniela MartinezDocument12 pagesEntrevista - Daniela MartinezDaniela MartinezNo ratings yet
- TEMARIODocument2 pagesTEMARIOFLORES CUBAS GERSON Alumno SISENo ratings yet
- Geo DesiertosDocument3 pagesGeo DesiertosCarlos GonzagaNo ratings yet
- Guia de Prac 2 Inst Electricas 1Document9 pagesGuia de Prac 2 Inst Electricas 1Jose Luis RiveraNo ratings yet
- Planificacion No.5Document6 pagesPlanificacion No.5Gabriel TorresNo ratings yet
- Psicologia Cognitiva FinalDocument18 pagesPsicologia Cognitiva FinalPatricio ToledoNo ratings yet
- Como Convertir Un Archivo PDF A Word para EditarDocument2 pagesComo Convertir Un Archivo PDF A Word para EditarBrandonNo ratings yet
- Cuestionario Estructuras de ConcretoDocument67 pagesCuestionario Estructuras de ConcretoJonatan RamosNo ratings yet
- Solucionario EstadisticaDocument19 pagesSolucionario EstadisticaJosé L. Matos VargasNo ratings yet
- Eca en El Cultivo de CacaoDocument46 pagesEca en El Cultivo de Cacaoelmer fretel100% (4)
- Hannah Hurnard - Pies de Ciervas en Los Lugares AltosDocument139 pagesHannah Hurnard - Pies de Ciervas en Los Lugares AltosCesia Tovar VidalNo ratings yet
- Calendario LaboralDocument3 pagesCalendario LaboralCesar Landeo OlorteguiNo ratings yet
- FASE 1 Tatiana Puerta Grupo 104Document22 pagesFASE 1 Tatiana Puerta Grupo 104TatisPuertaNo ratings yet
- Normas Técnicas Complementarias Sobre Criterios y Acciones para Diseño en EdificacionesDocument18 pagesNormas Técnicas Complementarias Sobre Criterios y Acciones para Diseño en EdificacionesMaricrés UríasNo ratings yet
- Efectos alcohol adolescentesDocument23 pagesEfectos alcohol adolescentesmaria esther de la rosaNo ratings yet