
You might also like
- Big-O Algorithm Complexity Cheat Sheet PDFDocument4 pagesBig-O Algorithm Complexity Cheat Sheet PDFKumar Gaurav100% (1)
- Ultimate Cheat Sheet for Heaps, Graphs, Searching, Sorting, Data StructuresDocument2 pagesUltimate Cheat Sheet for Heaps, Graphs, Searching, Sorting, Data StructuresGateSanyasiNo ratings yet
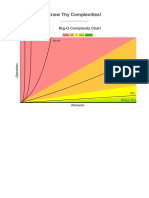
- Know Thy ComplexitiesDocument8 pagesKnow Thy ComplexitiesbhuvangatesNo ratings yet
- Searching: Depth First Search (DFS)Document7 pagesSearching: Depth First Search (DFS)AdityaNo ratings yet
- Big O CheatsheetDocument7 pagesBig O CheatsheetDan-CristianNo ratings yet
- Big-O Cheat Sheet-LetterDocument4 pagesBig-O Cheat Sheet-LetterFidel EnriqueNo ratings yet
- Time ComplexityDocument5 pagesTime ComplexitySutanu MUKHERJEENo ratings yet
- Big-O Algorithm Complexity Cheat SheetDocument9 pagesBig-O Algorithm Complexity Cheat SheetManoj PandeyNo ratings yet
- Big-O Algorithm Complexity Cheat SheetDocument4 pagesBig-O Algorithm Complexity Cheat SheetMìrägé Σ∞ ÃçêNo ratings yet
- Plexity AnalysisDocument9 pagesPlexity AnalysisDev ArenaNo ratings yet
- Big-O Algorithm Complexity Cheat SheetDocument6 pagesBig-O Algorithm Complexity Cheat Sheetgamezone89No ratings yet
- Big-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowellDocument9 pagesBig-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowelllaureNo ratings yet
- Complexity AnalysisDocument5 pagesComplexity AnalysisAtul VishwakarmaNo ratings yet
- Big-O Algorithm Complexity Cheat SheetDocument4 pagesBig-O Algorithm Complexity Cheat SheetPravind KumarNo ratings yet
- Space & Time Complexity ChartDocument2 pagesSpace & Time Complexity Chartmanan00No ratings yet
- Big-O Algorithm Complexity Cheat Sheet PDFDocument1 pageBig-O Algorithm Complexity Cheat Sheet PDFbhavana manglikNo ratings yet
- Time ComplexityDocument1 pageTime ComplexityMohamaad SihatthNo ratings yet
- Time ComplexityDocument6 pagesTime Complexitynrd522tjccNo ratings yet
- Know Thy Complexities!: Big-O Complexity ChartDocument2 pagesKnow Thy Complexities!: Big-O Complexity ChartaldugreNo ratings yet
- Know Thy Complexities!: Big-O Complexity ChartDocument2 pagesKnow Thy Complexities!: Big-O Complexity ChartRhythm PatelNo ratings yet
- Know Thy Complexities!: Big-O Complexity ChartDocument2 pagesKnow Thy Complexities!: Big-O Complexity ChartsssssssssssssNo ratings yet
- Big-O Complexity CheatsheetDocument2 pagesBig-O Complexity Cheatsheetiram juttNo ratings yet
- Big O Cheat SheetDocument2 pagesBig O Cheat SheetShekhar TarareNo ratings yet
- Big O Sheet PDFDocument2 pagesBig O Sheet PDFShekhar TarareNo ratings yet
- Big O Cheat Sheet: Array Sorting AlgorithmsDocument5 pagesBig O Cheat Sheet: Array Sorting Algorithmspravin patilNo ratings yet
- Big o Cheat SheetDocument6 pagesBig o Cheat SheetXinyu HuNo ratings yet
- Big-O Complexity Chart & Data Structure OperationsDocument2 pagesBig-O Complexity Chart & Data Structure OperationsDhruvaSNo ratings yet
- Big-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowell2Document1 pageBig-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowell2Mono Nightmare2No ratings yet
- DSA CheatSheet 1669861526Document9 pagesDSA CheatSheet 16698615261DS19CS050 GM LohithNo ratings yet
- Data Structure Cheatsheet - CombinedDocument9 pagesData Structure Cheatsheet - Combinedshiqiao zhuNo ratings yet
- Big-O Complexity Cheat SheetDocument5 pagesBig-O Complexity Cheat SheetNurlign YitbarekNo ratings yet
- Mid Term Cheet Sheet 2023 JulyDocument2 pagesMid Term Cheet Sheet 2023 JulyHtet Kaung SanNo ratings yet
- Data Structure ComplexityDocument3 pagesData Structure ComplexityPartha BanerjeeNo ratings yet
- Cheat SheetDocument3 pagesCheat Sheetecartman2No ratings yet
- O (N) O (Log Log N) )Document4 pagesO (N) O (Log Log N) )ArviNo ratings yet
- Algorithm Data Structure Time Complexity:Best Time Complexity:Average Time Complexity:Worst Space Complexity:WorstDocument1 pageAlgorithm Data Structure Time Complexity:Best Time Complexity:Average Time Complexity:Worst Space Complexity:WorstDrJayakanthan NNo ratings yet
- Redis command time complexity cheat sheetDocument6 pagesRedis command time complexity cheat sheetDiogenesNo ratings yet
- Big-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowellDocument9 pagesBig-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowelldungNo ratings yet
- Big O Cheat SheetDocument1 pageBig O Cheat Sheetramesh0% (1)
- Big O Cheat Sheet 1620815140Document1 pageBig O Cheat Sheet 1620815140biofdidou0% (1)
- Time and Space Complexity Comparison of Sorting AlgorithmsDocument2 pagesTime and Space Complexity Comparison of Sorting AlgorithmsHimanshu MishraNo ratings yet
- Introduction To C++Document5 pagesIntroduction To C++nartiishartiiNo ratings yet
- DS ComplexitiesDocument5 pagesDS Complexitiesk224827 Anum AkhtarNo ratings yet
- Time and Space Complexity of Common AlgorithmsDocument8 pagesTime and Space Complexity of Common AlgorithmsNetriderTheThechieNo ratings yet
- Case StudyDocument6 pagesCase Studyzaid bin shafiNo ratings yet
- Big O Notation PDFDocument9 pagesBig O Notation PDFravigobiNo ratings yet
- IUPUI CSCI 240 Course Analyzes Algorithms and Big-Oh NotationDocument15 pagesIUPUI CSCI 240 Course Analyzes Algorithms and Big-Oh NotationLaxman AdhikariNo ratings yet
- Properties of Big-Oh Notation: Dale RobertsDocument14 pagesProperties of Big-Oh Notation: Dale Robertsramurama12No ratings yet
- Sample Mid Term For Review: 2. A. Iteration (S)Document5 pagesSample Mid Term For Review: 2. A. Iteration (S)Romulo CostaNo ratings yet
- LITTLE O’S AND BIG O’SDocument6 pagesLITTLE O’S AND BIG O’SmrlsdNo ratings yet
- Design & Analysis of Algorithms: Aunsia Khan Week 04Document23 pagesDesign & Analysis of Algorithms: Aunsia Khan Week 04ASIMNo ratings yet
- Big-O Algorithm Complexity Cheat SheetDocument8 pagesBig-O Algorithm Complexity Cheat SheetNileshNo ratings yet
- Tables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39From EverandTables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39No ratings yet
- Discrete Series of GLn Over a Finite Field. (AM-81), Volume 81From EverandDiscrete Series of GLn Over a Finite Field. (AM-81), Volume 81No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet























































![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)

