You might also like
- HIIT Workout - Cutting Phase: General Warm-up/Flexibility RoutineDocument5 pagesHIIT Workout - Cutting Phase: General Warm-up/Flexibility RoutineMario R. Kallab100% (1)
- D-H Problems PDFDocument9 pagesD-H Problems PDFkrupachariNo ratings yet
- Spatial Mechanisms Lecture NotesDocument77 pagesSpatial Mechanisms Lecture NotesErico Eric100% (1)
- State Variable Analysis 1 FinalDocument75 pagesState Variable Analysis 1 Finalprabhabathi deviNo ratings yet
- Maritime Salvage Arbitration Under LOF 2000Document15 pagesMaritime Salvage Arbitration Under LOF 2000Lesther Antonio OrtegaNo ratings yet
- A Motion ControlDocument6 pagesA Motion ControlRonald CaravacaNo ratings yet
- Denavit Hartenberg ConventionDocument17 pagesDenavit Hartenberg Conventionshobri49No ratings yet
- r05410205 Advanced Control SystemsDocument8 pagesr05410205 Advanced Control SystemsShashidhar KasthalaNo ratings yet
- Designing A Neuro PD With Gravity Compensation For Six Legged RobotDocument8 pagesDesigning A Neuro PD With Gravity Compensation For Six Legged RobotVishwanath KetkarNo ratings yet
- Chapter 6 1Document26 pagesChapter 6 1Nyein Aye MyatNo ratings yet
- Robotics: Dynamic Model of ManipulatorsDocument20 pagesRobotics: Dynamic Model of ManipulatorsbalkyderNo ratings yet
- Lec9 Velocity KinematicsDocument30 pagesLec9 Velocity KinematicsbalkyderNo ratings yet
- ME427 LEC11 Forward KinameticsDocument15 pagesME427 LEC11 Forward KinameticsSohaib IrfanNo ratings yet
- Mathematical Model of Inverted Pendulum SystemDocument18 pagesMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- Pp. vs. SBDocument2 pagesPp. vs. SBemmaniago08No ratings yet
- Parents Consent SampleDocument1 pageParents Consent SampleJohn Ray EnajeNo ratings yet
- Inverse Kinematics PPT (Pak Toni)Document14 pagesInverse Kinematics PPT (Pak Toni)herawanadifNo ratings yet
- Quarter Car Model Paper - AU-009 PDFDocument7 pagesQuarter Car Model Paper - AU-009 PDFVictoria HicksNo ratings yet
- Inverted Pendulum CartDocument64 pagesInverted Pendulum CartTushar SanwareyNo ratings yet
- Direct KinematicsDocument66 pagesDirect KinematicsMateen Qadri100% (2)
- eRDPML InsforUse PDFDocument116 pageseRDPML InsforUse PDFMario R. KallabNo ratings yet
- Self-Balancing Robot: Clint Ferrin, Dana Sorensen, Cameron Frandsen December 15, 2016Document39 pagesSelf-Balancing Robot: Clint Ferrin, Dana Sorensen, Cameron Frandsen December 15, 2016Fatima BaigNo ratings yet
- T7 - State Feedback Analysis and Design - 2021Document35 pagesT7 - State Feedback Analysis and Design - 2021James ChanNo ratings yet
- Use of Kalman Filters in Time and Frequency AnalysisDocument78 pagesUse of Kalman Filters in Time and Frequency AnalysisJaya ShuklaNo ratings yet
- Modeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkDocument5 pagesModeling, Implementation, Simulation and Comparison of Different Control Theories On A Two Wheel Self Balancing Robot Model in SimulinkMario CavazosNo ratings yet
- Inverted PendulumDocument46 pagesInverted PendulumsalehknNo ratings yet
- Chapter4 Forward Kinematics For PositionDocument23 pagesChapter4 Forward Kinematics For Positionأحمد دعبسNo ratings yet
- DESIGN OF MACHINERY - Problem 4-18gDocument2 pagesDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraNo ratings yet
- Full Order Observer Controller Design For DC Motor Based On State Space ApproachDocument5 pagesFull Order Observer Controller Design For DC Motor Based On State Space ApproachSelaRajNo ratings yet
- 03 LagrangianDynamics 1Document28 pages03 LagrangianDynamics 1Terence DengNo ratings yet
- Lec8 Inverse KinematicsDocument32 pagesLec8 Inverse KinematicsbalkyderNo ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Advanced Financial Accounting & Reporting Part 2Document18 pagesAdvanced Financial Accounting & Reporting Part 2Ezio PaulinoNo ratings yet
- Rotary Inverted Pendulum: ME 452 Course Project IIDocument25 pagesRotary Inverted Pendulum: ME 452 Course Project IIMohammed BenbrahimNo ratings yet
- Abstract. The Balancing of An Inverted Pendulum byDocument5 pagesAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaNo ratings yet
- Total NotesDocument442 pagesTotal NotesArmando MaloneNo ratings yet
- Gyro Position Control - Student ManualDocument55 pagesGyro Position Control - Student ManualBruno Martins Leite0% (1)
- Hw2sol PDFDocument5 pagesHw2sol PDFShy PeachD100% (1)
- Natural Law ReflectionDocument2 pagesNatural Law ReflectionJeson71% (7)
- Commercial InvoiceDocument1 pageCommercial InvoiceMantha Devisuryanarayana100% (1)
- FBE Installation Manual PDFDocument60 pagesFBE Installation Manual PDFMario R. KallabNo ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Soco v. MilitanteDocument3 pagesSoco v. Militanteiwamawi100% (1)
- Modeling and Position Control of Mobile RobotDocument6 pagesModeling and Position Control of Mobile RobotAmin EslamiNo ratings yet
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001No ratings yet
- Robotics CH 4 Robot DynamicsDocument40 pagesRobotics CH 4 Robot DynamicsCharlette Alessi InaoNo ratings yet
- Luna Vs Court of AppealsDocument1 pageLuna Vs Court of Appealsapi-27247349No ratings yet
- Modeling An Inverted PendulumDocument45 pagesModeling An Inverted Pendulumjunaid_honey83896770% (1)
- Inverted PendulumDocument4 pagesInverted PendulumFerbNo ratings yet
- Inverted PendulamDocument34 pagesInverted PendulamVi JayNo ratings yet
- Model Predictive Control For UAVsDocument24 pagesModel Predictive Control For UAVsJulio BVNo ratings yet
- 1978 - Stable Adaptive Controller Design-Direct Control (Narendra)Document14 pages1978 - Stable Adaptive Controller Design-Direct Control (Narendra)ademargcjuniorNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- A Sliding Mode Control For Robot ManipulatorDocument27 pagesA Sliding Mode Control For Robot ManipulatorauraliusNo ratings yet
- Adaptive ControlDocument382 pagesAdaptive ControlAnonymous QakmLc3kTINo ratings yet
- Classical 093Document33 pagesClassical 093Julian David Henao EscobarNo ratings yet
- Advance Control SystemDocument3 pagesAdvance Control Systemcoep05100% (1)
- Inverted PendulumDocument71 pagesInverted PendulumShruti100% (1)
- DynamicsDocument31 pagesDynamicsNagamani RajeshNo ratings yet
- Dynamic Mobile Robot Paper 1Document6 pagesDynamic Mobile Robot Paper 1pgamasterNo ratings yet
- Jacobians-Differential KinematicsDocument62 pagesJacobians-Differential KinematicsChay Tick FeiNo ratings yet
- Jacobian and Static ForceDocument35 pagesJacobian and Static ForcesivaeeinfoNo ratings yet
- Lec12 ControlDocument19 pagesLec12 ControlbalkyderNo ratings yet
- HW1Document11 pagesHW1Tao Liu YuNo ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozNo ratings yet
- Self Balancing Robot Using PidDocument21 pagesSelf Balancing Robot Using Pidline follower robotNo ratings yet
- Inverted Pendulum Solution1Document13 pagesInverted Pendulum Solution1ggoloNo ratings yet
- Fundamentals of Lyapunov TheoryDocument9 pagesFundamentals of Lyapunov Theorygoitom01No ratings yet
- Arpita Thesis 1Document186 pagesArpita Thesis 1Aparajita SenguptaNo ratings yet
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Eceived: Nesma & Partners D CDocument1 pageEceived: Nesma & Partners D CMario R. KallabNo ratings yet
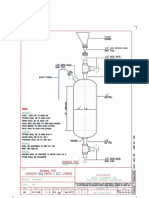
- VEOLIA 20 LT Dosing PotDocument1 pageVEOLIA 20 LT Dosing PotMario R. KallabNo ratings yet
- Tec45 KRDocument19 pagesTec45 KRMario R. KallabNo ratings yet
- Ultrasonic Flow Meter-Saudi FalDocument19 pagesUltrasonic Flow Meter-Saudi FalMario R. KallabNo ratings yet
- MEP Civil Clearance 15-July-2017Document4 pagesMEP Civil Clearance 15-July-2017Mario R. KallabNo ratings yet
- Equipment Solution 4Document1 pageEquipment Solution 4Mario R. KallabNo ratings yet
- Exam 2 - Standard and Procedures - SolutionDocument2 pagesExam 2 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- Equipment Solution 1Document1 pageEquipment Solution 1Mario R. KallabNo ratings yet
- Equipment Solution 2Document1 pageEquipment Solution 2Mario R. KallabNo ratings yet
- Equipment Solution 3Document1 pageEquipment Solution 3Mario R. KallabNo ratings yet
- Exam 3 - Standard and Procedures - SolutionDocument2 pagesExam 3 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- Exam 4 - Standard and Procedures - SolutionDocument2 pagesExam 4 - Standard and Procedures - SolutionMario R. KallabNo ratings yet
- 2016 EFR CFC Inst Guide Errata BJBS Final13Dec2016Document4 pages2016 EFR CFC Inst Guide Errata BJBS Final13Dec2016Mario R. KallabNo ratings yet
- Curriculum MenuDocument1 pageCurriculum MenuMario R. KallabNo ratings yet
- Writing About Survey Results - Answers PDFDocument1 pageWriting About Survey Results - Answers PDFMario R. KallabNo ratings yet
- 2016 EFR CPRAED Inst Guide Errata13Dec2016Document5 pages2016 EFR CPRAED Inst Guide Errata13Dec2016Mario R. KallabNo ratings yet
- Writing About Survey Results - Writing PracticeDocument1 pageWriting About Survey Results - Writing PracticeMario R. KallabNo ratings yet
- Inquirer A Tangled Web at StatehouseDocument4 pagesInquirer A Tangled Web at StatehouseRock QuarryNo ratings yet
- YEAR 8 CONTEXT - Docx Rom and JulDocument2 pagesYEAR 8 CONTEXT - Docx Rom and Julalateras-genco.dimitra.d1466No ratings yet
- Corporate LiquidationDocument11 pagesCorporate LiquidationchristineNo ratings yet
- NishkamDocument13 pagesNishkamAkashdeep SinghNo ratings yet
- Projected Income StatementDocument4 pagesProjected Income StatementRavi DhillonNo ratings yet
- U-Control UMX610/UMX490/UMX250: Quick Start GuideDocument13 pagesU-Control UMX610/UMX490/UMX250: Quick Start GuideTecnologia InformaçãoNo ratings yet
- Silver's Sentencing DocumentDocument248 pagesSilver's Sentencing DocumentCasey SeilerNo ratings yet
- Martin Luther 95 ThesisDocument12 pagesMartin Luther 95 ThesisRaji musharafNo ratings yet
- GASCODocument18 pagesGASCOSailee KordeNo ratings yet
- How To Book Railway Ticket Through Sms and Airtel MoneyDocument4 pagesHow To Book Railway Ticket Through Sms and Airtel MoneyYogesh PrajapatiNo ratings yet
- Name: Marife M. Plaza Course: BSEDEN 1-1Document2 pagesName: Marife M. Plaza Course: BSEDEN 1-1Marife PlazaNo ratings yet
- JournalDocument32 pagesJournalRavindra SinghNo ratings yet
- PFMAR Getafe 2016Document18 pagesPFMAR Getafe 2016Jairus SociasNo ratings yet
- Human Rights EducationDocument12 pagesHuman Rights EducationJAYPEE ATURONo ratings yet
- Exim PolicyDocument11 pagesExim PolicyRohit Kumar100% (1)
- Mahendra 1Document4 pagesMahendra 1rd12121988No ratings yet
- Mobilith SHC 100 - SDSDocument10 pagesMobilith SHC 100 - SDSCarlosFuentesNo ratings yet
- Christus Vivit Study GuideDocument21 pagesChristus Vivit Study Guideduy50% (2)
- Corrigendum-I: Prabandh Shikhar, Rau-Pithampur Road, Indore - 453556 PHONE: +91-731-2439630-34 FAX: +91-731-2439800Document65 pagesCorrigendum-I: Prabandh Shikhar, Rau-Pithampur Road, Indore - 453556 PHONE: +91-731-2439630-34 FAX: +91-731-2439800Shashank PriyadarshiNo ratings yet
- Vacancy Hiau - DuwasaDocument2 pagesVacancy Hiau - DuwasaHaki NgowiNo ratings yet
- Envirosorb MSDSDocument1 pageEnvirosorb MSDSapi-3703371No ratings yet
- Continuity and Connectedness: The Ngee Heng Kongsi of Johor, 1844-1916Document43 pagesContinuity and Connectedness: The Ngee Heng Kongsi of Johor, 1844-1916Amelia NofritaNo ratings yet