
System V Bla
System V Bla
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Insight 2016 Mathematical Methods Examination 1 SolutionsDocument15 pagesInsight 2016 Mathematical Methods Examination 1 SolutionsnochnochNo ratings yet
- Random Variables and Probability H Cramer (CUP 1962 125s)Document125 pagesRandom Variables and Probability H Cramer (CUP 1962 125s)Qinghua ShiNo ratings yet
- Solution Manual For Mathematical Physics With Partial Differential Equations - James Kirkwood PDFDocument14 pagesSolution Manual For Mathematical Physics With Partial Differential Equations - James Kirkwood PDFPiLiGonzalezNo ratings yet
- Essential Formulas For Algebra 2 Final Exam PDFDocument10 pagesEssential Formulas For Algebra 2 Final Exam PDFJustin JeudyNo ratings yet
- Venema Ch. 1 and 2 - Lectures 1 - 4Document25 pagesVenema Ch. 1 and 2 - Lectures 1 - 4DwiAnggunBissabriNo ratings yet
- Chapter 1 Lecture Notes - THE INTEGERS, INTEGER REPRESENTATIONDocument22 pagesChapter 1 Lecture Notes - THE INTEGERS, INTEGER REPRESENTATIONShatishwaran NaderajanNo ratings yet
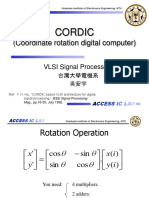
- Cordic: (Coordinate Rotation Digital Computer)Document25 pagesCordic: (Coordinate Rotation Digital Computer)AchuNo ratings yet
- Suprema & Infima - 1Document7 pagesSuprema & Infima - 1akilNo ratings yet
- Activity #1: Composition of Functions Inverse FunctionsDocument4 pagesActivity #1: Composition of Functions Inverse FunctionsWidi Toss Muda PurwodadiNo ratings yet
- Solving Quadratic Equation by Extracting Square Roots FactoringDocument7 pagesSolving Quadratic Equation by Extracting Square Roots FactoringBaems AmborNo ratings yet
- Oxo Machm 04va A000 Xxaann PDFDocument4 pagesOxo Machm 04va A000 Xxaann PDFChristopher JohnNo ratings yet
- Chapter (1) (Linear Function) AnswersDocument24 pagesChapter (1) (Linear Function) AnswersyoussefalrazzazNo ratings yet
- Sorting Algorithm PDFDocument11 pagesSorting Algorithm PDFИРадојичићNo ratings yet
- Anderson Time TheoryDocument47 pagesAnderson Time Theoryapi-303245090No ratings yet
- Me 418 (Correlation) : Analytic GeometryDocument1 pageMe 418 (Correlation) : Analytic GeometryLegna LegnaNo ratings yet
- One Option Correct QuestionsDocument41 pagesOne Option Correct QuestionsKalyan TarafdarNo ratings yet
- JsjakakakakkakakMathematics New SyllabusDocument5 pagesJsjakakakakkakakMathematics New SyllabusSudgar SinghNo ratings yet
- Smple Quest 4Document9 pagesSmple Quest 4Jefferson Galindez OntingNo ratings yet
- Cyclic NumberDocument12 pagesCyclic NumberMihai Lazar100% (1)
- Roots: Bracketing Methods: Berlin ChenDocument19 pagesRoots: Bracketing Methods: Berlin ChenlapuNo ratings yet
- Practice Problems 1 PDFDocument5 pagesPractice Problems 1 PDFLonie ReyesNo ratings yet
- Ial pm1 Exam Practice SolutionbankDocument4 pagesIal pm1 Exam Practice SolutionbankDiyaNo ratings yet
- NPTEL, Basic Linear Algebra, January 2019 Additional QuestionsDocument6 pagesNPTEL, Basic Linear Algebra, January 2019 Additional QuestionsRupendra yadavNo ratings yet
- Laplace Network 2Document21 pagesLaplace Network 2Apaar GuptaNo ratings yet
- Complex Number Polar To RectangularDocument2 pagesComplex Number Polar To Rectangularapi-3143325310% (1)
- Analysis Prelim August 2022Document2 pagesAnalysis Prelim August 2022rcherry calaorNo ratings yet
- Test 8Document20 pagesTest 8dienmattroittNo ratings yet
- Lecture 1Document84 pagesLecture 1NadipalliSrirajNo ratings yet
- Datamining K-MeansDocument25 pagesDatamining K-MeanssniperNo ratings yet
- Module 3 Quadratic EquationsDocument9 pagesModule 3 Quadratic EquationsNi ValNo ratings yet





































































You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Insight 2016 Mathematical Methods Examination 1 SolutionsDocument15 pagesInsight 2016 Mathematical Methods Examination 1 SolutionsnochnochNo ratings yet
- Random Variables and Probability H Cramer (CUP 1962 125s)Document125 pagesRandom Variables and Probability H Cramer (CUP 1962 125s)Qinghua ShiNo ratings yet
- Solution Manual For Mathematical Physics With Partial Differential Equations - James Kirkwood PDFDocument14 pagesSolution Manual For Mathematical Physics With Partial Differential Equations - James Kirkwood PDFPiLiGonzalezNo ratings yet
- Essential Formulas For Algebra 2 Final Exam PDFDocument10 pagesEssential Formulas For Algebra 2 Final Exam PDFJustin JeudyNo ratings yet
- Venema Ch. 1 and 2 - Lectures 1 - 4Document25 pagesVenema Ch. 1 and 2 - Lectures 1 - 4DwiAnggunBissabriNo ratings yet
- Chapter 1 Lecture Notes - THE INTEGERS, INTEGER REPRESENTATIONDocument22 pagesChapter 1 Lecture Notes - THE INTEGERS, INTEGER REPRESENTATIONShatishwaran NaderajanNo ratings yet
- Cordic: (Coordinate Rotation Digital Computer)Document25 pagesCordic: (Coordinate Rotation Digital Computer)AchuNo ratings yet
- Suprema & Infima - 1Document7 pagesSuprema & Infima - 1akilNo ratings yet
- Activity #1: Composition of Functions Inverse FunctionsDocument4 pagesActivity #1: Composition of Functions Inverse FunctionsWidi Toss Muda PurwodadiNo ratings yet
- Solving Quadratic Equation by Extracting Square Roots FactoringDocument7 pagesSolving Quadratic Equation by Extracting Square Roots FactoringBaems AmborNo ratings yet
- Oxo Machm 04va A000 Xxaann PDFDocument4 pagesOxo Machm 04va A000 Xxaann PDFChristopher JohnNo ratings yet
- Chapter (1) (Linear Function) AnswersDocument24 pagesChapter (1) (Linear Function) AnswersyoussefalrazzazNo ratings yet
- Sorting Algorithm PDFDocument11 pagesSorting Algorithm PDFИРадојичићNo ratings yet
- Anderson Time TheoryDocument47 pagesAnderson Time Theoryapi-303245090No ratings yet
- Me 418 (Correlation) : Analytic GeometryDocument1 pageMe 418 (Correlation) : Analytic GeometryLegna LegnaNo ratings yet
- One Option Correct QuestionsDocument41 pagesOne Option Correct QuestionsKalyan TarafdarNo ratings yet
- JsjakakakakkakakMathematics New SyllabusDocument5 pagesJsjakakakakkakakMathematics New SyllabusSudgar SinghNo ratings yet
- Smple Quest 4Document9 pagesSmple Quest 4Jefferson Galindez OntingNo ratings yet
- Cyclic NumberDocument12 pagesCyclic NumberMihai Lazar100% (1)
- Roots: Bracketing Methods: Berlin ChenDocument19 pagesRoots: Bracketing Methods: Berlin ChenlapuNo ratings yet
- Practice Problems 1 PDFDocument5 pagesPractice Problems 1 PDFLonie ReyesNo ratings yet
- Ial pm1 Exam Practice SolutionbankDocument4 pagesIal pm1 Exam Practice SolutionbankDiyaNo ratings yet
- NPTEL, Basic Linear Algebra, January 2019 Additional QuestionsDocument6 pagesNPTEL, Basic Linear Algebra, January 2019 Additional QuestionsRupendra yadavNo ratings yet
- Laplace Network 2Document21 pagesLaplace Network 2Apaar GuptaNo ratings yet
- Complex Number Polar To RectangularDocument2 pagesComplex Number Polar To Rectangularapi-3143325310% (1)
- Analysis Prelim August 2022Document2 pagesAnalysis Prelim August 2022rcherry calaorNo ratings yet
- Test 8Document20 pagesTest 8dienmattroittNo ratings yet
- Lecture 1Document84 pagesLecture 1NadipalliSrirajNo ratings yet
- Datamining K-MeansDocument25 pagesDatamining K-MeanssniperNo ratings yet
- Module 3 Quadratic EquationsDocument9 pagesModule 3 Quadratic EquationsNi ValNo ratings yet