Professional Documents
Culture Documents
T 2 Electrical 2007
Uploaded by
Anonymous epd9bzM0%(1)0% found this document useful (1 vote)
96 views30 pagest 2 Electrical 2007
Original Title
t 2 Electrical 2007
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this Documentt 2 Electrical 2007
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0%(1)0% found this document useful (1 vote)
96 views30 pagesT 2 Electrical 2007
Uploaded by
Anonymous epd9bzMt 2 Electrical 2007
Copyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 30
ALENAND#IA UNIVERSITY
aculty of Engineering
Flectrical Fnginzering Department
Time ailowed’ 3 Hours
m is TWO only.
The number of pages of this exan
Anewer all the following quest
Question 1:
a) Compare between:
iy OSi and TCPAP reference models.
ii) TCP and UDP.
iii) inirastucure and AD-HOC wireless network,
bh). There are two connection strategies namely connectionless ard connection-oriented
iy Give a network example that uses each strategy.
ii) Give the advantages and disadvantages of each strategy
ey Suppose oso hosts, A and B, are separated by 25000 km and connected by & link of delay
« bandwidth ~ 256 Mb. Suppose the propagation speed over the link is 2.5: 10° m/sec.
i} Caleulate the minimum RTT and the bandwidth,
jer sending a file of dOMbytes, what is the m
between the request for the data goes out and the transfer of data finished
tiv Cons imum amount of time that will
Question 2:
a) Define the following terms: Latency and throughput
b) Give an advantage and disadvantage of the following transmission media
i Coaxial cable ii) Fiber optics
iii) Radio transmission iv) Lightwave transmission
¥) Geostationary Satellite vi) ADSL
ey Compare between circuit and packet switching
a) What are the functions of the data link layer?
ib) What is the fiinction of bit stuffing? If the following bit sequence is received, what is the
transmitted sequence? The sequence is: 1101011111015111001 101111100110.
cy Compute the CRC for the message M = 0111101 and a generator polynomial G= 10it
d) What are the advantages of the selective-repeat over the go-back-n algorithm?
¢} What are the differences between error control and flow control?
Questi
a) In the Ethernet frame, what are the functions of the preamble and the CRC?
i) What is the advantage of Manchester encoding over a simple binary coding? Give a
disadvantage of Manchester encoding?
©) What are the similarities and the differences between CSMA/CD and CSMA/CA?
d) What does NAV stand for? What is its function?
°) EE 802.4, explain how the token bus is formulated
oy List four routing algorithms. Give an advantage and a disadvantage for each algorithm.
b) What are the advantages of the IPv6 over IPv4?
cc) What is the content of the pseudoheader?
&) Compare between:
1) Congestion avoidance and congestion reaction.
ji) Open-loop and closed-loop congestion control.
n 6
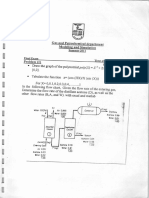
fy For the network shown in the following figure, the maximum packe1 sizes are 1500 bytes
for the vo Ethernets, 4506 bytes for FDDI network and 532 bytes for the point-to-point
network. If'a 1420-byte datagram (20-byte IP + 1400-byte data) sent from host A to host
BB. Show the contents of the IP header in each packet transmitted over the four Links.
[ “] Ethernet ] FDDI >| PPP F | Ethernet (|
| 4 | rR {Pf R | | B |
by Forthe shown network, derive the shortest routing paths from A to the other nodes using
Dijskira routing protocol. Draw the spanning tree.
Question
a) Draw the timelins of the TCP connection establishment and tennination
) State the six flags used in the TCP header. Explain their functions briefly.
¢) Explain how the advertised window is computed in the TCP header
4) Explain how the TCP computes the timeout of any packet.
¢) State twn congestion control used by the TCP. Explain one of them briefly.
Question
2) What is the function of the DNS server?
b) What does SMTP stand for? Explain its function,
c) Whar is the main difference between POP3 and IMAP?
d) Draw the timeline of requesting any WWW page
e) What are the functions of the following: Web proxy, Web cache and CDN?
Good Luck
Examiners: Dr. Nayera Sadek and the committee.
Page 2 of 2
By ASM ete
Alexandria University
Faculty of Engineering ass
Electrical Engineering Department
May 2007 2007 ys
10638 Solid State Electronics Sa I ot Sh 10688
Time Allowed: Three Hours eel ei
The number of pages of this exam is Eight.
Answer all the following questions:
|.a-The cross section of a simple semirecessed oxide NMOS transistor is shown in Fig. .
Make a possible process flow chart for fabrication of this structure. Show the structure cross
section and the masks used in the process sequence. Indicate the dark and transparent areas on the
‘masks and the photoresist (positive or negative) used with each mask.
b- Repeat part (a) for the npn transistor whose cross section is shown in Fig.2
The mask set for a simple rectangular pn junction diode is shown in Fig.3. Tite diode is formed
ina paype substrate, Draw a picture of the horizontal layout for the diode that resulis when @
worst-case misalignment of 3 m occurs in both the x- and y- directions on cach mask level
(i) Assume that both the contact and metal levels are aligned to the diffusion level.
(Gi) Assume that the contact level is aligned to the diffusion level and the metal level is aligned to
the contact level
‘What type of photoresist must be used with each of the three mask levels (n-diffusion window,
contact windows, and metal etch) used to fabricate the diode. Assume thet the areas shown are
dark on the mask (a “light-field mask”).
«&- What wavelength illumination is required to achieve minimum feature size F ~ 0.25 yam with lens
numerical aperture NA = 0.5 and without the use of phase-shifting masks?
‘What is the value of the corresponding depth of field DF? Give an estimate for the minimum
feature size that can be achieved using a phase-shift mask.
F=OSKINA & DF =0.64/(NA)?
= Write brief notes on wet chemical etching and dry plasma etching.
2.a- Derive the following expression for the oxide thickness as a function of time.
Xo(0= 0.5 ATG BIA) (C+ OY7= 1]
Where BYA is the linear rate constant, B is the parabolic rate constant, and
t= (X /B) + {X, /(B/A)}
X, is the initial thickness of the oxide on the wafer.
'b- A <100> wafer has a 2000-A oxide on its surface.
(8) How long did it take to grow this oxide at 1100° C in dry oxygen?
(Gi) The wafer is put back in the furnace in wet oxygen at 1000° C. How long will it take to grow
an additional 3000 A of oxide?
Solve this problem graphically (Fig. 4).
cA 2-tim SiO film is needed as the initial oxide on a <100> silicon wafer, Calculate the growth
time in wet oxygen at 1150°C.
X°o/B + Xo/(BUA)-1
Page! of
Hypa eat
culty of Engineering Rasta Ais
ecring Department tay gD Lasigh ad
ELEMOSH Electrical Power Engineering Se sl eae
1 Year Fleetviea! Machine & Traction - Diplome
Time allowed : 3 Hours
The number of pages of this evamination is Two
Answer the following questions :
1.a. Explain the effects of distributed compensation on voltage control
and on line charging reactive power.
b, Explain how to control of open circuit voltage with shunt reactance
rectors
©. Show the advantages and disadvantage of three types of
compensating equipment for transmission systems.
lel capacitors are used to correet power factor of a
Alexandria University
ud. How the series and pa
load in power systems ?
sion line has the following line constant,
2. 4, A 500 KV transt
20 < 82° and C = 0.002 < 90°. VR =500 KV.
A= 0.8 < 20° and B=
Determine
i) the power at sending end (QS , PS )
the power at receiving end (PR, QR)
iii) the voltage Vp for maximum efficiency
iv) PCat maximum efficiency
3.4275 KV transmission line has the following line constants :
= 0.8 <5° and B= 220< 75°
power at unity power factor that ¢
ed at 275 KV.
tion equipment would be required if the
a. Determine th he received if the voltage
profile at each end is to be maintai
h, What type and rating of compe
Joad is 150 MW at unity power factor with the voltage profile as in part (a),
© With the load as in part (b), what would be the receiving end voltage if the
compensation equipment is not installed,
4. A500 KV angle 20 transmission ling has surge impedance
ZO =278 < -30° where ¥ = (3.8x10 ~ 7,065) red /KM,
VR =S00KV
Determine the voltage Vx at distance X =750KM For given P= 600, 900
1200 MW
5. For the cireuit shown in Fig.(}) determine:
a, The value of Sy
d. The voltage at sending end,
¢. The rating of the synchronous condenser located at Bus B
Alexandria University Ay jaisuyt deals,
Faculty of Engineering Ruaigll IS
Elect Hay gS Raaaigll aa
May. _ Vee gle
Electrical Machines Dynamics, EXE 674 4 gS CRY) dala
MSc. sale (sgt
Time allowed: Three Hours. Glebe 208 i 5
‘The number of pages of this exam is ONE only.
Answer all the following questions:
1-a) What are the assumptions and procedures to obtain the basic machine model?
b- Discuss the objective(s) of the reference frame theory.
2. The "dynamometer" type of ac ammeters and voltmeters may be represented by
two-coli device; the coils are connected in series. The self- and mutual inductance $
12 0.0.1 mh;
Ry=R-0
‘The restraining helical spring produces a torque that is proportional to the rotor
angle from 0 to 90° and produces a torque of 0.016 n-m at 90°. The current in the
i Tim coset.
ive a qualitative expression for the time instantaneous torque on the rotor as
function of the angular position.
- Find an expression for the average torque on the rotor as a function of 0.
3- Write down the matrix equations for the basic model of the de machine, then
deduce the machine model when the field winding(s) is/are connected:
i- Separate ries
iii- long compound iv- short compound
Derive the torque equation for a separate de motor.
4+ Develop the d-q equivalent circuits of a three-phase induction motor IM in a
synchronously rotating reference frame. Explain the benefits of using this frame
over other IM frames. Discuss the importance of each IM frame?
5- Write down the differential equations of a synchronous reluctance motor in a
rotor reference frame. Develop the electromagnetic torque equation.
_ Page J of 1
Examiner:. Dr. Thanaa Sharaf-Eldin
Alexandria University
Ay jsisarfiaaty ,
Faculty of Engineering Ausig lls
Electrical Engineering Department fell Lai pa
May 31, 2007 2007 p31
ELE 673: Neural Networks al gall plainly aS}
MSc. machines and power section Jfaaalall
Chelan 8 2G ji
Time allowed: Three Hours.
The number of pages of this exam is Two only.
intempt the following questio
1) The network shown in fig(1) is an analoge to digital converter and can be used for
coding a continous signal of value x Into a 4 bit unipolar bidirectional code (03, 02,
1,00). Analyize the network and find each range of x that is converted to each of
the binary codes (0 0 0 O)j.... (1 1 1 1). Assume -1ex < 16 and unipolar
binary neurons used in which f (net) = O for net 0 other wise =1 for net > 0.
2) Prototype points are given as:
SIRX 73), Xs=(3 2], Xs= [5 4]! : class!
[0 0}, X6 <1 -3)',X,=[-2 3] Xs=[-3 0}: class2
2) Determine if the two classes of patterns are linearly separable.
°” Determine the center of gravity for patterns of each class, and find and draw the descision
surface in the pattern space.
Using the decision hyperplane equation given by : (x; — x2 )! + % ( || x2 I*= |] x2 [P=0
and W=x1— x
Wer = % ([} 2 [P [x2 IP)
Designe the dichotomizer for the given prototype points and determine how it would
recognize the following input patternsof unknown class membership.
Scaeeemeaeere : x=[0 5] >» x= [36/13 oO}!
3) A- Write a program implementing the error back propagation training algorithm for user
selectable /, J and K’ values for a single hidden layer network. Learning constant 1 should be
user selectable; no momentum term is needed. The initial weights for the network should be
selected at random. Provision for specification of input pattern(s) and desired response
should be made in order to initiate and carry out training . Use bipolar continous percetron.
b- Implement the classifier of three printed characters A, T, and O as shown iin fig(2) . Set an
an appropriate Em value such that an error free classification is assuresd. Assume no
niomentum term: try different 1) values for different architectures. The target values should be
selected as (1-1-1) forA, (-1 1 -1)forl,(-1 -1 1) for O. Assume two different
input representations according to the following guide lines:
(a) 16 pixels, three input vectors in the training set, n= 16 (J = 17, J=9, and
(b) Two coordinates for each pixel, 16 input vector in the training set, n =
and K=3)
, (T= 3, J=9,
4) For the two-neuron continous time single-layer feed back network shown in fig(3) with heigh
ain neurons, find the following
(a) state equations.
(b) The weight conductance matrix W.
(c) The truncated energy function, E(W).
(4) The gradient vector ofthe truncated energy function. gE (v)
uniners: Prof. Dr. S. deghedie
Alexandria University
Faculty of Engineering
Electrieal Engineering Department
June, 2007
Automatic Control oo aS
First Year Diploma(Power) 88 pats cls! Abad
Gleb 3:G453)
‘Time allowed: 3 hours
Examiner: Dr. Mahmoud Zaytoun
“Answer the following questions
(1) Consider the system with the following state space model
[2 0 [:
x(t) + u(t)
0 Lo.
w(t) =[0 1] x(t)
Assume the control system to be u(t) =-k x(t)
Design the optimal feedback gain matrix k such that the following performance index is minimized
“
LC (ty+Rw(tyjat with R= 1/5
Hint: The Riccati equation (PA + A'P— PBR BP +Q=0)
(2) Find the state model of multi-input multi-output system
Y¥(s)=G(s)U(s)
Where
Page | of 2
Alexandria University Ay jase) dead,
Faculty of Engineering te,
Electrical Engineering Dept. ns
First Year Diploma (Power Section) (2007 i) deal chats
Final Exam. (May 2007) "si Py acm
Electrical Machines & Control feu st call
Time Allowed : 3 hr.
Open notes examination
Answer All Questions:
1- Three-phase, 2000 kVA, star-connected alternator is delivering its full load to a
TIkV bus-bars at 0.8 power factor leading. The armature has synchronous
reactance of 10 0 and a resistance of 1 Q.
a) Determine the stator current, the excitation voltage. the power ang
alternator efficiency
b) If the ficld current increased by 30% while the steam-flow rate decreased by
20%, determine the stator current, the power factor, the power angle and the
alternator efficiency in this case.
) What is the value of the maximum power the machine can deliver just before
breaking out of synchronism in both cases?
Saturation and rotational losses may be neglected.
and the
‘A three-phase, star connected, salient pole synchronous generator has negligible
stator resistance and zeactances of Xy=0.8 pau. and Xq=0.5 pu.
If the generator is connected to an infinite bus af the rated voltage, determine:
a) The excitation voltege and the power angle when the generator delivers its
raied kVA to a pure inductive load.
b) If the excitation is kept constant, determine the maximum power the motor
can deliver and the corresponding motor current, power factor and power
angle,
3- The field winding of a three-phase, cylindrical rotor, synchronous machine without
per windings is short circuited and a single-phase voltage is connected to the
star-connected armature winding between the "b" and "c" terminals with "a" open
circuited as shown. If the machine is at rest, prove that:
Ve = 24 Rat Lap ~ [Mia p. sind? (Ret Le ply i.
Hint eo
4x 5
—cos(0 = sine 7
V3c0s0
cos - =
4a
sini? sing -
Ons
5
Derive an expression for the torque required to drive x salicat-pole synchronous
or with damper-windings at steady-state if it feeds a balanced three-phase,
star-connected! inductive load with resistance Rj, and inductance L,, What wil! be
the value of this torque if the generator is a non-salient without damper-windings
and its terminals are short-circuited?
enera
A salientepole, 2 pole, 50 Hz, synchronous generator without damper windings has
the following parameters:
4 O2Q Re OL OQ, ha =O. Ly OAS de OF Wand Myyy 9.25 11
field winding voltage is Ve = 10 V; for a sudden thre short-circuit
. determin:
"
from an open circuit and with rotor angle of 30° at t =
a the rms values of the open circuit e.m.f.
b= the equation of the field current i(t).
c+ the equation of the armature current i,(\).
ce the Value of the field and armature currents at the time instants = 0.0, 0.2 and
1.0 see
Good Luck
Prof, Dr. Mohamed Magdy Ahmed
| Alexandria Un
Ay tisuy aly!
Faculty of Engineering
desig
Elect. Eng. Department eS Raigad
| May 2007 2007 le
L Final Exam }
Introduction to Statistical Communications: Assoaail) Gay! gl) Ji
Course number 1068461 1068461 44, 531s
Time allowed: 3 hours Cele 3 gal
7 Attempt the following questions
OPEN BOOK EXAM
All. questions have the same points
Question 1
is 2 complex Gaussian random variable with zero mean and variance 0} = 4. Y is related to X by
Y=2X. What are the mean, variance and probability density function (PDF) of the following
random variables? Write the formula of the PDF and sketch the PDF formula.
Z,=Z3+Z? |
Za \ai+2;
Question 2
A random variable X has a probability density function f(x) fo)
as shown in figure, Find: t
a) The value of K k
b) The probability P(X<1/2)
©) The probability P(-1/2 Xd.
Permanent magnets need stabilization.
The poles of de motors are provided with pole shoes made of high permeability material
Operation at maximum energy product point is preferred.
‘Second quadrant of the B-H loop is always of interest.
Large air gaps may demagnetize the magnet,
b. Derive an expression of stator current, axes currents, and torque of a permanent magnet synchronous motor
and then sketch how the torque varies with the load angle 8 in case of: ‘
i. Xd> Xq li, Xd< Xq ss
(2) a. Explain, using diagrams, the construction and theory of action o” brush-less de motor and show 90° elec.
kept constant irrespective of rotor position and speed.
b. APM brush-less de motor has a torque constant of 0.12 Nm/A rferred to the de supply. The motor is star
connected and has two phases on at any instant
1. Estimate its no-load speed in rev / min when connected to a 43 de supply.
ii, Ifthe resistance per phase is 0.2 © and the total voltage drop in the controller resistance is 2.2 V,
determine the stall current and the stall torque (i.e. at zero seed).
(3) a, What is meant by Hall effect and Hall element, Explain its theory and the principle of posit
(give an example).
mn detection
b, Using dimension less quantities show how can you calculate the generalized torque/slip characteristics and
currenU/slip relation of 3-phase solid rotor induction motors.
4)
Sketch the phasor diagram of a permanent magnet synchronous .notor and show how can you determine
saturated values for Xd & Xq. Give an expression for the axes current and output developed power
'b. A 3-phase segmental rotor reluctance motor has the following p.irameters in Ohms per phase:
Xd= 44 Xq= 12 r=25
Use the circle diagram to estimate:
|. Pull out torque in synchronous watt. Il. Max. power factor III, Load angle at | and Il
(5)_a.In stepper motors sketch the following relations:
I. Static torque/speed characteristics IL, Dynamic to:que/rotor position characteristics
‘And then explain the necessary conditions to achieve successfu, acceleration from rest.
b. In stepper motors explain briefly what is meant by mechanical r-sonance? Then show the effect of inertia
onit.
Page | of 1
Examiner(s): Prof. Dr. Magdy M. K. EL Attar
University of Alexandria
Faculty of Engineering
Engineering Dept.
June 2007
Industrial Electronics (ELE-531)
1* year Dip. In Measurements and Control as g cla a ghd yl
Time Allowed: 3 Hours hele ou
Electric:
Number of pages of this examination is TWO only
Open-Book Examination
Attempt the following questions:
1Q-1]
Discuss the main differences between the step up (boost), step down (Huck)
and the step up/down (buck/boost) converters. Explain the principle of
operation of each of them and compare between them from the point of view
of.
Input to output voltage range.
Chopping frequency.
Ideal Circuits.
Number of components,
Positive or negative output capabilities.
Continuous and discontinuous conduction
Output voltage ripple.
Possible modes of operation (quadrants).
Non-isolated operation.
Component rating in design
ve se>eange
[Q-2]
(a) A buck converter has a load resistance of 109 and tne input voltage is
V, = 220V. When the chopper switch remains on, its voltage drop is 2V and
the chopping frequency is f = 10kHz. If the duty cycle is 50%, determirs (a)
the average output voltage V, (b) the rms output voltage Vo, (c) the chepper
efficiency, (d) the effective input resistance of the chopper, and (¢) ti rms
value of the fundamental component of the output harmonic voltage.
(b) A battery-powered car uses a 240 V battery, and the driving motor is
controlied by a fixed frequency chopper operating at 5 kHz. While going
down a slope, the car is being regeneratively braked. The motor voltage is 70
V. The motor current is 20 A. The resistance of the motor circuits 2 +2
‘Assume ideal filtering on both the input and output sides of the chonper.
Calculate
Page t of 2
Ayyatsuy daals
Alexandria University
Faculty of Engineering aigh Us
Electrical Engineering Department A gSll Laat aad
June, 2007 MOST)
Second Year Electronics (484 443) BE S39 Alsi i) ya Lyles 9 Jus ogi Last gs
Diploma 4 $5 phe 200
Time allowed: Three Hours. Shel CDG jh
Documents are allowed
1) Explain the difference in technology and applications between:
Micro-electro-mechanical systems , and
ii- Microelectronic devices
‘Show how communication systems are affected by MEMS technology.
2) Historically, sensors and actuators are the most costly and unreliable part of a macroscale
sensor-actuator-electronics system. Show how MEMS and Nanotechnology allows these
complex eletromechanical systems to be manufactured using batch fabrication techniques.
3) One of the basic building blocks in MEMS processing is the ability to deposit thin films of
‘material, this can be achieved by two different approach: chemical reaction, and physical
reaction. Give examples for both technologies showing the fundamental procedure and the
case when this procedure can be used.
4) Aided
neat sketches explain how patterns are transferred to the surface of a MEMS.
device. Show the difference between positive and negative resist.
5) Show the basic structure of : a) Thermal actuator, and b) Electrostatic actuator.
What are the advantages and disadvantages of each type?
6) Show how tunable capacitors are designed and fabricated using standard MEMS
technology?
Alexandria Un
College of Engi
Department of Electrical
Engineering
High Voltage DC TL.
“May 2007
4g aia) daale
Aacsigit As
Aap gS! Auraigll aud
Time allowed is 3-hours.
Answer ail the questions.
[Q-1]
Define the following:
a) Over lap angle.
b) Commutation failure,
¢). Rectification and inversion operation.
d) Effective short circuit ratio.
e) Constant ignition control.
f) Constant current control.
9) Constant extinction angle control.
[Q-2]
State the advantages and the disadvantages of using high voltage direct current
transmission line as a power link between two AC systems.
(2-3)
2) Explain how the rectifier and the inverter affect the reactive power
between the AC system and the DC transmission line.
») Explain how to control the active power transmitted through a high voltage
DC link
c) Show how to reduce the effect of the power electronic switching of the
rectifier and the inverter of the high voltage DC link on the AC networks.
Good Luc!
Vga) eine
Alexandria University Sy sieayl day
Faculty of Engineering aig As
Electrical Engineering Department Bay gh aig a
May, 2007 Het
Power System Protection, ee i LS
Second year Diploma (power section) BA tat
Time allowed: 3 Hrs ek B08 ro
Answer the Following Question:
1) For the circuit shown in Figs:
i) State the principle and write a detailed flow chart that shows how the settings of back-up
protection using distance relays work in an adaptive way for relay R.
ii) Based on your flow chart above calculate the setting of relay R for the first, second and third
zones of protection when, (i) The system is in normal operation.(ii) Lines # 2-5 and 2-7 are
out of service,
2) A 220 kV power system consisting of a number of transmission lines is shown in Fig 2.
‘The following information is available.
> Transmission lines A & B operate in parallel. TL B is not always in service. TL A has a
peak load that is tripped only during real emergency conditions if the current exceeds 1000
A. Protection of TL A is through R1 which consists of two relays that can operate together
in any programmable way.
> Cis multi terminal TL system with relays R2, R3 and R4 protecting it.
> Disa 220/66 kV transformer that has on-load tap changing. Relays RS and R6 protect the
transformer. RS is a digital over-current relay and RG is a digital differential retay.
> Adaptive protection is to be applied on all relays shown in Fig2, it is required to:
i) State in brief the possible adaptive features that can be added to each relay
your answer write the relay number and describe the adaptive feature added
to it.
ii) Write a flow chart showing how the adaptive feature of each relay is done.
220KV,
‘Transmission system IL
System
8 RG
— Ra]RS
System |} + Load
D
[System 111
3) Two directional over-current digital relays are connected as shown in Fig. in order to
protect feeder A. Each directional relay protects against overload and short circuit
provided that it is in the protection zone, inside feeder A. The following is the scheme
of operation for relay 1:
i) Felay 1 calculates the RMS current of each phase and the phase angle between
cach phase voltage and current (@,-0;). If the angle is +ve than the fault is
nternal if the angle is —ve than the fault is external.
Relay 1 will also not trip unless it receives a confirmation signal from relay 2.
You are required to do the following:
Specify the inputs to each relay.
Draw the hardware components of Relay 1, Show clearly the communication
channel and the data it receives. Explain the function of each component
briefly.
¥) Draw the flow chart showing the operation of relay 1 as described above.
Write the equations used to calculate the current and phase angle.
Relay 1 Relay 2
| Feeder A
4) Relay pe-formance testing is one of the key issues in modern protection. In view of this
statement describe the 3 different tests used for relays. For each test draw a wave shape
sample fur it and explain the test method on the wave.
5) Using su table equations and diagrams, derive from the first principles a formula for the
Fourier ‘ull cycle window algorithm.
Good Luck
Ashraf Megahe 1
Alexandria University 1" Year Diploma
Faculty of Engineering May 2007
Electrical Eng. Department Time Allowed: 3 Hrs.
106431
‘Atempt the following questions:
PARTI
The differential equations describing the behavior of permanent-split capacitor, single-phase
induction motor when referred to stationary (d-q) frame can be written in the form:
[vp-ve] [Rp+Lpp 0 nM Pp 0 ip
vo Lf? RQ+Lep 0 mp |fig
0 ja MP Mor RrtLrp — Lror | lide
a Mor MP -Lror Rrtbyp | lige
From which we can get the following derivatives:
Where, ve is te capacitor voltage and is given by:
Jipat
‘o,= rotor specd in electric radians/sec.
Also, from ba:ane2 between input and output
Te= Speoqmytt ot Te
From which we get
Poa = [Te To-TLYI
Where.
qq rotor speed in mechanical radians/sec.
Te=M [igri ~n igrin} / pair of poles
Tp = Berm
T= Load torque
For a constint load torque TL=1.5-Nm, using SIMULINK toolbox under MATLAB predict
transient anc steady-state performance for the following permanent-split capacitor, single-phase
induction motor: % hp, 115-V, 60-Hz, 4-pole. The machine parameters referred to the main
winding (Q) are:
Rg=2.02-0 R412.
Lo=0.1846-H L,=0.1828-H = M=0.1772-H
J =284x10% kgm? B= 5x10 Nm/(rad/sec)
The supply phase voltages are given by
Vor ¥ p= Vinsin(iot)
Where. *
Vo 21 15V2-V f= 60-Hz
‘The predicted performance should include waveforms for: stator currents, supply current, rotor .
speed, and electiic torque developed.
Good Luck
Alexandria University Ag pase! deals
Faculty of Engineering faaight 5
Electrical Engineering Department Bape Laila
June, 2008 . . ( ee 2007 sx
Architecture of Digital Signal Processing Hab oh LY Ages Cy nee
MS.c studies Ube La! jah
Time allowed: Three Hours. Caleta ED 20
Question 1
1. Prove: i) The convolution theorem ii) The correlation theorem
2. Explain using equations , two applications of the correlation
3. Obtain a relationship between the zero-lag correlation of two different
waveforms and their total energy content,
4. Use the overlap ~ add procedure to convolve the two sequences
h(n) = {1,0,2}
and x(n) = (1,3,2,-3,0,2,-1,-2,3 ven}
N=8
Question 2
1. Draw a flowchart for a three stage interpolator
2. Draw an illustration of interpolation by a rational factor (L=5,M=3)
3._A signal x(n) at a sampling frequency of 96 Khz is to be decimated to
yield a signal at a sampling frequency of 1Khz. The highest frequency of
interest after decimation 450 Hz. The antialiazing digital filter should
satisfy the following specifications
Passband deviation 0.01
Stopband deviation 9.001
Design a suitable two stage decimator .Let M; = 32, Mp=3
An estimate for the number of filter coefficients is given dy
-10log (5, + &s )~Ci
L-Explain and derive an expression for the variance for the non-
parametric methods of the spectrum estimation
2. Show that the twin effects of the window in reducing the signal ener;
and in introducing low frequency components into the spectrum may
be overcome by windowing a linear function of the data rather than the
data
Question 4
Explain the DSP implementation of FFT, FIR Filter and the multisrate
signal processing
Page 1 of 2
Alexandria University
Faculty of Engineering
Electrical Engineering Department 7
May 2007 _ _ _. _ one
\pplication of Mathematical Methods in A Ane Gob abs
Electrical Engineering, 10641 VeNEY Ay ygsth Quaigh
Post Graduate Student M.Se. (Power) sam shee
wile ly BOG ys
ime allowed: Three Hours _ _
The number of of this exam is TWO onl
Answer all the following questions:
form to be used with prima! simplex method, and
-a, Put the following problem in a standa
then determine:
i- The maximum number of possible basic
ji At least three feasible extreme points.
erations,
Maximize Z= 2x) - 4x2 +5x3-6 xy
Subject to
xp + 4x.-243 +84 5 2
+X) +2x,4+3x5 t4xy 5 1
Nis Nay X3oXy 20
I-b, Solve the following linear programming (LP) problem using dual simplex method:
Minimize Z=3x,+2 x2
Subject to
3ut m2
4xpt3m 26
xt xr S
Ry Xr 20
1-e. State the special eases that can arise in the application of the simplex method.
alternative optima;
1d. Solve the following LP problem, then show that the problem has
Maximize, Z=2x;+4%
Subject to
xyt2uS5
xt ms4
Xi X2 20
What is the importance of knowledge of alternative optima in practice?
2.3, Examine she following objective funetions for extreme points:
sys
xem $3 x1 x2
Page 1 of 2
Alexandria University
Ayyaisuyh da
Faculty of Engineering asi 4S
Electrical Engineering Department ay eS Leigh pad
May. 2007 Toe gle
System Identification BN ye
1° Year Diploma (Control and Measurements) (ay S03) palo GM
Time allowed: 3 Hours.
Answer all the following questions:
ie
Stele Tiga!
To identify a nonlinear element of a control system, the following measurements for the
input, uy, and output y, , are obtained:
0 i 2 3 [4 3 6 |
Ly 0 an 2 3 ir 5 6 |
[ye (1.08 165 [24 34 433 62 7.68
a) plot yx versus u,.
b) Decide a model(parameter)using the method of least-squares.
©) Determine the minimum value of the loss function.
2. The following table gives the data generated by the process: yx + Yx.1=b uk-1+ x
where uy is the input, yx is the output, and ex is zero-mean Gaussian noise with known
standard de
x i 2 3 4
[uy 1 [a 1 =I 1
Ye io Tar 1.25 “0.27
Determine the least-squares estimate of the parameters "a" and "b",
3
For a unit step input, u,=1, the following measurements are obtained:
Consider a discrete-time system described by: yxtay'.1=bux-itex where uyis the
put, yx is the output, and ¢, is zero-mean Gaussian noise with known standard deviation.
fk To 1 2 3 4 3
Ye 0 [o.or 1.05 1.69 3.02 74
a) Determine an estimate of the parameters "a" and "b
b) Assume that a new output measurement, ye~39.3 is available, find the new estimate of
"a" and "b" using the recursive least-squares.
4. Consider the following ARMA process: yx-aYu-1= ek +CCx-1 Where yy is the output,
and ¢ is zero-mean Gaussian noise with variance o”. Find the asymptotic least-squares
estimate of the parameter "'a'', and state the condition for the estimate to be unbiased.
Alexandria University
Facuity of Engineering
Electrical Engineering Department
May, 2007
areca
Ee ess ae a
Time allowed: 3 Hours. 7 cles EO 2G
Microprocessor Based System Design
First Year Diploma and M.Sc.
uestion:
Answer all the follow!
1. Write an assembly program (with the aid of a flow chart) for a 4-bit (one-digit) BCD
(Binary-Coded-Decimal) counter that counts the input pulses from a pulse generator as
shown in figure. Then the output count is applied to a BCD-to-seven segment decoder
through port A as shown.
-——
PICIGF84
SS
BCD
To
== RB4 RAO 7 segment
RAL [>| Decoder
aed
RAB >
Write an assembly program (with the aid of a flow chart) for a 3-bit de-multiplexer where
the input is on port A and the output is from port B and connected to eight LEDs as
shown. Note the function of the de-multiplexer is to determine which LED should be on
according to the binary input.
RBO
RBI
RB2
RB3 2
| RBs >
RAO RBS > —~p}e-—ewet.
oa ———} RAL RBG | ee ome,
———] raz RB7 pe oom.
—
3. Discuss briefly each of the following:
The different Reset signals in the PICL6K84
b. The different Interrupt signals in PICLGR84
c. The difference between the directives EQU, SET, CONSPANT, and VARTABLE
he
giving an example for ¢:
oF
ae] J ath
FL FEL 2h
‘SATS | staTus——] 83h
Fae rsa aah
Fonte | TARE 85h
FORTE | Tes een
eh
TEOATE TEES] 8h
[Tesoro] aah
an RATT TET] BAH ADDWE
ign [Teor mreon | 36h SUBLW
Lia eth" SUBWE
ANDLW
66 hytes RAM memory |
GPR |
registers
iene
oa
«t—
7Fh __| Fh
BankO Bankt
: |
Gfrasroc set |
Giro pyc er
des tere wf
{freon ear fy
yet fh
es 0s]
ig asop iene
Alexandria University
‘
Faculty of Engineering, deaigh
Electrical Engineering Department Ss aS aig pad
ELE 534 Elecrric and Magnetic Properties of Solids BLE 534 satya dhl yay Sb gal
YEAR HSD in Electronic Engineering Shy FANN ae Ue SLL lo
Time: 3:00 Hes ete SOE eh Yew gl Vga)
Examiners: Prof Dr ELS. A, EL-Badawy &Committee BanDly pith gle se pla pal
Atiempt ALL questions: ‘Neat answers and boxed results are appreciated
Question 1
Choose True or False. On your answer sheet, write the number of the question followed by your choice T or F.
vote: Two wrong ss cancel one correct choice
1. In solids and liquids the distance between neighboring atoms or molecules is of the order of a few micrometers,
‘while in a gas at room temperature at one atmosphere the average distance between molecules is of the order of
TF
Inverystalline Solids, the atoms are stacked in a regular manner forming a three-dimensional pattern which may
be obtained by a three-dimensional repetition of a certain pattern unit.
(rir
4. The polycrystalline solid consists of an agglomeration of microscopic monocrystals whose behavior at the
macroscopic scale is isotropic
TIF
5. An anisotropic mx
i TIF
6. Crystalline
depend on the direction in which they are measured.
aterial is one whose physical prope
;enerally anisotropic materials but a crystalline solid is homogeneous.
ice point per primitive cell,
8. The Tivear density of lattice points var‘es with the direction: the density is high in the directions of large indices
and low in the directions of small indices.
[ TTF
9. The direction of higher density of lattice points corresponds to higher separation between two successive
smemiber vectors of this direction
TIF
10. Ina erystal the cohesion force is stronger in the directions of larger indices.
TIE
11. Ina lattice, the notation [hkl] refers to an infinite set of evenly spaced parallel vectors and not to a unique
vector.
12. A set Dh h 1) passes by a specific group of lattice points and not by all lattice points,
(“tre
13, Ina lattice, the notation (h KI) refers to an infinite set of evenly spaced parallel planes and not to one particular
plane.
i
14, The set of planes (hk 1) passes by all lattice points
TTF
15, The distance, measured along the axes a,b, €,, between vo adjacent planes of a set of planes (hk 1) are,
hho
respectively. =.= and —
“16. In wa brthogonal set of axes a,
planes (hk 1) is: diy,
t planes of the set of
+, the (normal) separation distance between two ad
1
0
17. The distance Ben
TIF
decrease and vice versa.
en two adjacent planes of the set of planes (h k 1) tends to increase as the Miller indices
18. The lattice planes of smaller indices (hkl) are slightiy populated.
a
19, In cubie latices, the direction {hk} is always perpendicular to the plane (hk) having the same indices, but this is not
generally true for other lattice systems.
TIF
20. The direction (001] is the zone axis of the zone of faces (100), (010), (100) and (010).
TIE
21. A point symmetry operation is that operation which conserves one point, at least, immobile; when it applies
about a lattice poin
nt it leaves the lattice invariant. A point symmetry operation does include translation
f TIF
22. By a lattice point
group one means the collection of symmetry operations which when applied about a lattice
point leaves the lattice invariant,
TIE
23. 4 crystal has a 3-fold inversion axis if a rotation of 120° around this axis followed by an inversion operation
through a given point on the axis leaves the crystal unchanged.
TIE
25. A G-fold inverse a
the axis,
24. Stereographie projection enables one to represent a three dimensional object over a plane.
TIE
ixis implies the existence of a collinear 3-fold direct axis and x mirror plane perpendicular to
[ TLE
26. The association 0
perpendicular 2-fol
Fa 3-fold direct axis and a perpendicular 2-fold direct axis implies the existence of three
Id direct axes with interangles equal to 60°.
F
vinn
metry in monoclinic crystalline system is one 3-fold axis,
neiry in cubic crystalline system is three 3-fold axes.
ine system a = b = cand a=B=y, < 120° 490°,
28, ‘The essential sy
TIE
29. In trigonal erystalli
CTF
30. There are five 2-D.
-Bravais lattices and thirty-two 3-D-Bravais lattices.
31. The fee lattive is the most populated lattice; it isa close-packed structure..
TIF
32. There are 12 nearest-neighbor lattice points in a close-packed structure.
{ TIF
33, The maximum fi
factor of simple cubic system is about 0.68.
ratio c/a is V2 =1.414,
35, Pure metals such as sodium Na, potassium K, and cesium Cs crystallize in the crystal structures of bec lattices
‘with one atom per
fF
‘hot normally occupied by an atom.
TLE
int aie.
al defect means an atom is transferred from a lattice site to an interstitial position; a positi
“
ALEXANDRIA UNIVERSITY MSC. EXAM 5 pl o
YORE
RICAL ENG, DEPT. TIME ALLOWED: 3HRS Spe
PAST ALGORITHMS FOR SIGNAL PROCESSING (ELE 615)
ANSWER THE FOLLOWING QUE!
1.a.Define the discrete Fourier transform, DFT, of the tis —
Fo N=4, write the DPT of the sequence x(n} in 2 matt
b.Derive the decimation in time, radix 2, FFT algorithm,
cIf'x(n)~{2,3,-2,5}, calculate the frequency spectrum X(m) and the autocorrelation
furction
4 Use the matrix approach of the circular convolution to obtain a linear convolution
of the two sequences: h(n)={1,0,2,4,2,0,1} and x(n)=(1,1,1,1,-1-lL-1
e.The impulse response of a filter and the signal to be filtered are given by:
1 for 0sn<3
hin)=
0 elsewhere
0 forn<0
x(ny= 1 for 0sn<3
for 40
2 eth N=8, determine the linear convolution of the sea
_x(n) wath the impulse response h(n) using the overlap-save method, _
2.a.Define the di vausform, DWT, of the time sequence x(n). of period ™ _—_
b For N~4write the DWT of the sequence x(a) in a matrix form, assuming Walsh-
ordered DWT ,Hada:nard- ordered and Paley- ordered DWT.
c Derive the main steps of the fast Walsh transform, FWT, algorithm.
c.f x(n)={1,2,3,4,5,6,7,8}, calculate the sequency spectrum X(k) and the dyadic
autocorrelation function,
«Give the main steps transforming the arithmetic autocorrelation function into the
logical autocorrelation function (AAF—1
3.4 Define the discrete Hartley transform, DHT, of the time sequence x(n)
b.\What is the relation between Hartley and Fourier transforms.
c.Draw the flow diagram of the fast Hartley transform, FHT, in case of N=.
«Calculate the FHT of the sequence x(n)={3.2,1,0,2,4,6,1}
¢ Calculate the number of operations, (multiplications & additions), as a function
of the length N, required for the computation of the DHT and the FHT
What will be the percentage of reduction in the number of operations when we use
calculate the DHT ofa sequesice x(n) of length N=16
a sequence x(n) of length N716 —
* " 4.4 Define the DCT of the time sequence x(nj of length Nv
+ 7b, For N=4, write the DCT in matrix form.
© Compare between the DC? and the DF
©. What are the main steps of tie fast computational algorithm of the DCT
© Give the reduction in the number of operations when we use the KC i
£ Discuss briefly the use of CT in signal compression
5 a, What is a basic wavelet function?
Show how a set of waveiet basic function can be venerated.
~~» Detine i) The continuous wavelet transform (CW).
ranstorn,
iat are the main properties of the CWT?
© 2. De;
he waveiet transiorm of a signai,
What is the difference between wavelet transform and short time Fourier transform?
be the Mallat’ tree algorithm to compute the discrete wavelet transform,
© Snow chat the original discrete signal can aiso be reconstructed with the same algorithrr
© “onsiger the function x(t) which has eight samples represented by the vector
Ss anaivaing wavelet
1 Calculate the DWT of x
+) Represent x(t) in terms the obtained coeiticiems.
ui) Discuss the obtained resuits
How can we use OW in data compression?
1-0. -4. 4, 2. 4. 9. 3. 6] and the Haar wavelet. D2, with coefficients Ca= Cs = i
BEST WISHES & GOOD LUCK
4, a) Deseribe the structure, differences and applications of the following SS CDMA receivers:
- Matched filter Single user receiver.
jis Multi-user receivers.
jii- Rake Receivers
b) Describe the different channels and types of codes used in the 1S-95 CDMA Cellular
communications systems and the differenee of their use in the up and down links. Discuss the
limitation of 1S-95 and dicuss brievly its evolution to 3G systems.
¢} i+ Aided with equations and block diagrams deseribe multi-carrier OFDM systems and
discuss their applications, advantages and disadvantages.
‘i= T'yplain the PFT-based implementation technique aided with transmitter & receiver
1 ay ell as thy importance of Cyelie Prefix?
Discuss the details and compare the use of spreading codes in the following systems:
i. 2.G SS Cellular communications systems (IS-95) uplinks and downlinks.
lular mobile communications (UMTS system),
iii, W-LAN systems.
iv. GPS Satellite Positioning Systems.
6. Write a short researeh reports on only one of the following research topics:
ib Multirate transmission in hybrid Frequency-Hopping / Multicarrier / Direct-Sequence
CDMA systems.
ji Multiuser diversity techniques for support of quality of service of CDMA sytems over
fading channels
iii, DS/SSMA unslotted ALOHA systems with variable length data traffic.
iv. Coded DS-CDMA using pilot assisted channel estimation and interference suppression
in fading channels.
\= Adaptive interference suppression for DS-CDMA,
Vie Combining Rake Receivers with Turbo Coding for enhancing energy consumption and
quality in CDMA systems.
vile Multiuser MIMO wireless communication systems performance enhancement
techniques in frequency-selective fading channels.
viii Mutti-user pre-rake space-time block codes techniques in fading channels. :
Good Luck, Prof. Dr. Said E. E-Kfamy .
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Computer 2017Document26 pagesComputer 2017Anonymous epd9bzMNo ratings yet
- Petro 2017Document46 pagesPetro 2017Anonymous epd9bzMNo ratings yet
- Computer 2017Document26 pagesComputer 2017Anonymous epd9bzMNo ratings yet
- حاسبات و اتصالات ربيع2011Document46 pagesحاسبات و اتصالات ربيع2011Anonymous epd9bzMNo ratings yet
- غاز و بتروكيماويات صيف2011Document23 pagesغاز و بتروكيماويات صيف2011Anonymous epd9bzMNo ratings yet
- حاسبات و اتصالات ربيع 2013-2013Document45 pagesحاسبات و اتصالات ربيع 2013-2013Anonymous epd9bzMNo ratings yet
- غاز و بترو خريف2011Document52 pagesغاز و بترو خريف2011Anonymous epd9bzMNo ratings yet
- حاسبات و اتصالات خريف2012-2013Document55 pagesحاسبات و اتصالات خريف2012-2013Anonymous epd9bzMNo ratings yet
- الغاز و البتروكيماويات خريف2010Document50 pagesالغاز و البتروكيماويات خريف2010Anonymous epd9bzMNo ratings yet
- غاز وبتروكيماويات 2009 خريفDocument40 pagesغاز وبتروكيماويات 2009 خريفAnonymous epd9bzMNo ratings yet
- Final Exams 2015 1st CivilDocument14 pagesFinal Exams 2015 1st CivilboghdadyNo ratings yet
- الحاسبات و الاتصالات خريف 2013 PDFDocument51 pagesالحاسبات و الاتصالات خريف 2013 PDFAnonymous epd9bzMNo ratings yet