You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Gabriel Rincon-Mora-Analog IC Design With Low-Dropout Regulators (LDOs) (Electronic Engineering) (2009) PDFDocument373 pagesGabriel Rincon-Mora-Analog IC Design With Low-Dropout Regulators (LDOs) (Electronic Engineering) (2009) PDFNguyen HaNo ratings yet
- Transient Stability Analysis Using Equal Area CriterionDocument50 pagesTransient Stability Analysis Using Equal Area CriterionIndri KndiNo ratings yet
- A Review of Polymer Electrolyte Membrane Fuel Cells - TechnologyDocument28 pagesA Review of Polymer Electrolyte Membrane Fuel Cells - TechnologyguillermocochaNo ratings yet
- Principles of Control Systems Engineering Vincent Del Toro and Sydney R. Parker PDFDocument715 pagesPrinciples of Control Systems Engineering Vincent Del Toro and Sydney R. Parker PDFAlaor Saccomano100% (2)
- Douglas Rushkoff - CyberiaDocument154 pagesDouglas Rushkoff - Cyberiarodolfo_jmNo ratings yet
- Feedback Amplifiers Analysis PDFDocument2 pagesFeedback Amplifiers Analysis PDFDanNo ratings yet
- Stability of Gaussian Process Learning Based Output Feedback Model P 2018 IfDocument7 pagesStability of Gaussian Process Learning Based Output Feedback Model P 2018 IfguillermocochaNo ratings yet
- Further Results On The Linearization Problem in Discret 2014 IFAC ProceedingDocument6 pagesFurther Results On The Linearization Problem in Discret 2014 IFAC ProceedingguillermocochaNo ratings yet
- The Dynamics Antiinflammatory ResponseDocument24 pagesThe Dynamics Antiinflammatory ResponseguillermocochaNo ratings yet
- T Cell-Derived Protein S EngagesDocument11 pagesT Cell-Derived Protein S EngagesguillermocochaNo ratings yet
- Model-Free Feedback ControlDocument12 pagesModel-Free Feedback ControlguillermocochaNo ratings yet
- Review Modeling Lung ImmflamationDocument25 pagesReview Modeling Lung ImmflamationguillermocochaNo ratings yet
- Automatica VibContNoAver 2015Document11 pagesAutomatica VibContNoAver 2015guillermocochaNo ratings yet
- Nonlinear ObserversDocument6 pagesNonlinear ObserversguillermocochaNo ratings yet
- Continuous Glucose Monitoring: A Review of Recent Studies Demonstrating Improved Glycemic OutcomesDocument13 pagesContinuous Glucose Monitoring: A Review of Recent Studies Demonstrating Improved Glycemic OutcomesguillermocochaNo ratings yet
- What Happens To The Human Heart in Space?: - Parabolic Flights Provide Some AnswersDocument9 pagesWhat Happens To The Human Heart in Space?: - Parabolic Flights Provide Some AnswersguillermocochaNo ratings yet
- Diferencias Matlab OctaveDocument5 pagesDiferencias Matlab OctaveguillermocochaNo ratings yet
- Etd 2013 4520 PDFDocument138 pagesEtd 2013 4520 PDFguillermocochaNo ratings yet
- Transfer Function ManipulationDocument4 pagesTransfer Function ManipulationrodwellheadNo ratings yet
- Multi-Agent Systems Using DiamagneticDocument6 pagesMulti-Agent Systems Using DiamagneticDreadful ParagonNo ratings yet
- Systems Analysis and Control: Matthew M. PeetDocument24 pagesSystems Analysis and Control: Matthew M. PeetfhfgNo ratings yet
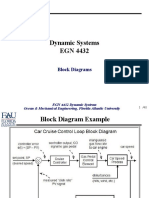
- Dynamic Systems EGN 4432: Block DiagramsDocument40 pagesDynamic Systems EGN 4432: Block DiagramsKeyvon AndersonNo ratings yet
- FN.0.2 FloControl Additional InstructionsDocument7 pagesFN.0.2 FloControl Additional InstructionsAmir KhanNo ratings yet
- Ai Presentation Servo MotorDocument12 pagesAi Presentation Servo Motormahadzir72No ratings yet
- Universal Bugomatic Bro 03 21Document4 pagesUniversal Bugomatic Bro 03 21Victor PATIÑONo ratings yet
- Manual de Mantenimiento de La HMC (Alarma)Document302 pagesManual de Mantenimiento de La HMC (Alarma)Carlos MottaNo ratings yet
- Feedback Amplifiers Theory and Design PDFDocument2 pagesFeedback Amplifiers Theory and Design PDFMikeNo ratings yet
- Inverter Diagnostics - 7100 - 0243444 - 0001 - A0Document14 pagesInverter Diagnostics - 7100 - 0243444 - 0001 - A0Hadriyudin BaharudinNo ratings yet
- Lgentb0520 PDFDocument12 pagesLgentb0520 PDFamidi5555913No ratings yet
- Electronic Fundamentals: B) The Active ElementDocument45 pagesElectronic Fundamentals: B) The Active ElementZbor ZborNo ratings yet
- Harmonic Oscillator ProjectDocument9 pagesHarmonic Oscillator Projectsvhanu4010No ratings yet
- HP Prime Control Systems App v3.01 - User Guide 20211125Document45 pagesHP Prime Control Systems App v3.01 - User Guide 20211125Alfredo PeñaNo ratings yet
- Feedback Gap Ame PDFDocument14 pagesFeedback Gap Ame PDFIngrid Patricia Viasus FlorezNo ratings yet
- DC Servo MotorDocument10 pagesDC Servo MotorGourav KumarNo ratings yet
- Open System Theory in NursingDocument43 pagesOpen System Theory in NursingMarivic MisolaNo ratings yet
- OM Manual DN3Document27 pagesOM Manual DN3trưởng võNo ratings yet
- DSE530 Operator ManualDocument26 pagesDSE530 Operator ManualRonald Victor Galarza Hermitaño0% (1)
- Edc QB Final LatestDocument15 pagesEdc QB Final LatestrajeshadktNo ratings yet
- Control SystemDocument44 pagesControl SystemAishwarya Chandrasekar100% (1)
- Design of A Low Cost Automatic Servo Controlled Stabilizer With Quick Response To Voltage VariationsDocument6 pagesDesign of A Low Cost Automatic Servo Controlled Stabilizer With Quick Response To Voltage VariationsRANAIVOARILALA FanomezantsoaNo ratings yet
- Introduction To The Human BodyDocument5 pagesIntroduction To The Human BodyHiena BurcaNo ratings yet
- Kinget Matching Offset PDFDocument13 pagesKinget Matching Offset PDFmouneshskNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet