You might also like
- Metabolisme - Smarta MedikaDocument12 pagesMetabolisme - Smarta MedikaBintang SmartaNo ratings yet
- Laporan Akhir Mekatronika Kelompok XXDocument210 pagesLaporan Akhir Mekatronika Kelompok XXRahmat FajarNo ratings yet
- Soal Latihan UTS Biosel Revisi - 29Document13 pagesSoal Latihan UTS Biosel Revisi - 29devojy21No ratings yet
- Pengendalian Kecepatan Motor DC Dengan MatlabDocument16 pagesPengendalian Kecepatan Motor DC Dengan MatlabAhmad Mukholik0% (1)
- Soal Remed PTS GenapDocument2 pagesSoal Remed PTS GenaprendraNo ratings yet
- Teknologi Biologi Molekuler PDFDocument30 pagesTeknologi Biologi Molekuler PDFPutri Justicarici NNo ratings yet
- Laporan Praktikum Fisika Modern FahyuDocument26 pagesLaporan Praktikum Fisika Modern FahyufahyuNo ratings yet
- Tugas Persamaan Dasar Akuntansi (1) - 1Document2 pagesTugas Persamaan Dasar Akuntansi (1) - 1M Lim SNo ratings yet
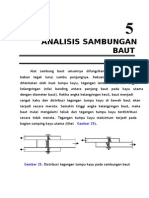
- Bolted JointDocument44 pagesBolted JointLiaGalihPrasetyantiNo ratings yet
- Dse 2019 - Silabus - Olimpiade Guru Ipa SMPDocument2 pagesDse 2019 - Silabus - Olimpiade Guru Ipa SMPJuara Adi SiraitNo ratings yet
- Kelompok 4 - Bahan Ajar Pembelahan SelDocument14 pagesKelompok 4 - Bahan Ajar Pembelahan SelRahma HanifahNo ratings yet
- Gaya Kelas 8 SMP Labschool CibuburDocument13 pagesGaya Kelas 8 SMP Labschool Cibubursetiariokta1313No ratings yet
- Energi Dalam Sistem KehidupanDocument7 pagesEnergi Dalam Sistem KehidupanAgoeng SumpilNo ratings yet
- Kuis FotosintesisDocument4 pagesKuis FotosintesisMedina Andini100% (2)
- Analisa Kasus Continental Airlines Inc (Analisis Internal)Document5 pagesAnalisa Kasus Continental Airlines Inc (Analisis Internal)eunikeNo ratings yet
- Kontrol Motor Servo Dengan Menggunakan PIDDocument14 pagesKontrol Motor Servo Dengan Menggunakan PIDFairuzy QonitahNo ratings yet
- Proposal Pembuatan AplikasiDocument19 pagesProposal Pembuatan AplikasirestiNo ratings yet
- BarometerDocument11 pagesBarometerLayly HariadiNo ratings yet
- Prediksi Soal Un Ipa Smp-Paket 13Document5 pagesPrediksi Soal Un Ipa Smp-Paket 13jidinNo ratings yet
- Bank SoalDocument93 pagesBank SoalRiezkyIkhaNo ratings yet
- Reproduksi SelDocument19 pagesReproduksi Seldyah ayuNo ratings yet
- Lat Soal Sist Transportasi (UN SMP)Document4 pagesLat Soal Sist Transportasi (UN SMP)robingahNo ratings yet
- KISI KISI PAS IPA KLS VIII, 2017-2018 K 2013 RevisiDocument7 pagesKISI KISI PAS IPA KLS VIII, 2017-2018 K 2013 RevisiDoremi SolmifasolNo ratings yet
- Karya Ilmiah Penggunaan Logam Sebagai Semikonduktor Pada Komponen ProsesorDocument47 pagesKarya Ilmiah Penggunaan Logam Sebagai Semikonduktor Pada Komponen ProsesorRahman SubrataNo ratings yet
- Soal Gerak Pada TumbuhanDocument1 pageSoal Gerak Pada Tumbuhanmaya monicaNo ratings yet
- Klasifikasi Dengan KNN, SVM Linear Dan Non Linear, Serta Analisis DiskriminanDocument8 pagesKlasifikasi Dengan KNN, SVM Linear Dan Non Linear, Serta Analisis DiskriminandoraNo ratings yet
- AustraliaDocument11 pagesAustraliamarisa itaNo ratings yet
- Review Kontrol PID - 2Document86 pagesReview Kontrol PID - 2AhmadRifkiNo ratings yet
- Dioda Dan Transistor: Laporan Resmi Praktikum Elektronika - P1Document35 pagesDioda Dan Transistor: Laporan Resmi Praktikum Elektronika - P1Retnani Dita AyuningtyasNo ratings yet
- Studi Analisis Sistem Fisik Thermal Dengan Pemodelan Stirrer Tank Heater Menggunakan Simulink MatlabDocument10 pagesStudi Analisis Sistem Fisik Thermal Dengan Pemodelan Stirrer Tank Heater Menggunakan Simulink MatlabMaheka AjiNo ratings yet
- SOAL PENDALAMAN MATERI (Repaired)Document4 pagesSOAL PENDALAMAN MATERI (Repaired)Doni RamdhaniNo ratings yet
- Osilator Phase ShiftDocument6 pagesOsilator Phase Shiftdeanazhardiyanti100% (1)
- Bahan Ajar Dasar PemrogramanDocument565 pagesBahan Ajar Dasar Pemrogramanagus_fauzixxxNo ratings yet
- Modul Kelangsungan Hidup OrganismeDocument35 pagesModul Kelangsungan Hidup OrganismeIrmawati100% (1)
- Kelompok 11. KonjungturDocument12 pagesKelompok 11. KonjungturYoni Sira SadhaniNo ratings yet
- Soal MitosisDocument3 pagesSoal MitosisMajid Marco100% (1)
- Praktikum 3 Telekomunikasi 1 Phase Shift OscillatorDocument7 pagesPraktikum 3 Telekomunikasi 1 Phase Shift OscillatorMoh. Ali FauziNo ratings yet
- Spektrofotometri UV Dan Visibel (OK)Document27 pagesSpektrofotometri UV Dan Visibel (OK)Anonymous yEff4GMYNo ratings yet
- Kerja Lab - 11 - 190610334Document12 pagesKerja Lab - 11 - 190610334Natazha Jennyfer PodandiNo ratings yet
- MAKALAH ELEKTRONIKA DIGITAL CounterDocument8 pagesMAKALAH ELEKTRONIKA DIGITAL CounterNur Moh. Alif Al-wahidNo ratings yet
- Makalah Lengan RobotDocument8 pagesMakalah Lengan RobotGregorius Pasca Christi KaisarNo ratings yet
- Soal Un Mat 2015-2019 PDFDocument41 pagesSoal Un Mat 2015-2019 PDFDoni RamdhaniNo ratings yet
- Tugas Tad Analisis KovariansiDocument7 pagesTugas Tad Analisis Kovariansifahrudin ikhsanNo ratings yet
- Dinamika Rotasi 2Document21 pagesDinamika Rotasi 2Rena YunitaNo ratings yet
- Robot Arm 4 DofDocument9 pagesRobot Arm 4 DofNdo ImhNo ratings yet
- Menyalakan LED Menggunakan Code Vision AVRDocument5 pagesMenyalakan LED Menggunakan Code Vision AVRRubiantoNo ratings yet
- Analisis MarkovDocument15 pagesAnalisis MarkovSyayid All AzzarNo ratings yet
- Panduan KSN 2021 Jenjang SMADocument69 pagesPanduan KSN 2021 Jenjang SMAandiNo ratings yet
- TUGAS Fisika Kls X (Momentum Dan Impuls)Document3 pagesTUGAS Fisika Kls X (Momentum Dan Impuls)NadilaNo ratings yet
- Gerak GLB Dan GLBBDocument9 pagesGerak GLB Dan GLBBAbu SaufaniNo ratings yet
- Operation Amplifier Penjumlahan Dan PenguranganDocument6 pagesOperation Amplifier Penjumlahan Dan PenguranganImam HS50% (2)
- Tugas Instrumentasi SafetyDocument5 pagesTugas Instrumentasi Safetyeruchan25No ratings yet
- Sistem Manajemen Produksi Pada Perusahaan Coca ColaDocument13 pagesSistem Manajemen Produksi Pada Perusahaan Coca ColavikkiNo ratings yet
- Struktur Organisasi KehidupanDocument17 pagesStruktur Organisasi Kehidupansetiariokta1313100% (1)
- Makalah Proteus Tugas Pak YamanDocument29 pagesMakalah Proteus Tugas Pak YamanIbrahim MiharbiNo ratings yet
- RPP Zat Aditif Dan Zat AdktifDocument18 pagesRPP Zat Aditif Dan Zat AdktifMasdaNo ratings yet
- Yulli Handoko CNC Laporan PDFDocument57 pagesYulli Handoko CNC Laporan PDFKoKo100% (1)
- Ma Bio PDFDocument35 pagesMa Bio PDFmus4 alhkawarizmiNo ratings yet
- Contoh Proposal SkripsiDocument9 pagesContoh Proposal SkripsiKikikNo ratings yet
- Fadhli R Faridah A. Ikram A. NadarDocument5 pagesFadhli R Faridah A. Ikram A. NadarFaizal KhoirNo ratings yet