Geneva Mechanisms
INTRODUCTION
‘The Geneva is one of the earliest of all intermittent
motion mechanisms and when input is in the form
of continuous rotation, it is probably still the most
commonly used. Genevas are available on an off-
the-shel? busis from several munufaeturers, ina
variety of sizes. They are cheaper than eams or star
wheels and have adequate-to-good performance chat
eteristies, depending on load faetors and other
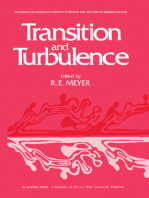
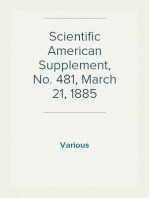
design requirements, Figure 9-1 shows « typical,
four-slot external Geneva,
Advantages of Genevas
Genevas may be the simplest and least expensive
of all intermittent motion mechanisms. As mentioned
before, they eome in a wide variety of sizes, ranging
from those used in instruments, to those used in
machine tools to index spindle eartiers weighing
several tons. They have good motion-eurve char-
eteristies compared to ratchets, but exhibit more
“jerk,” or instantaneous change in aeceleration, than
do better eam systems (the Gi you will re-
member, is 1 special type of eam system)
‘The Geneva maintains good control of its load at
all times, since it is provided with loeking ring sur-
faces, as shown in Fig. 91, to hold the oui put during
dwell periods. In addition, if properly sized to the
load, the Geneva generally exhibits very long life,
One machine tool manufacturcr told me that their
Genevas will last 20 years, indexing onee every fev
Ww
seconds, on a three-shift basis, driving a spindle
carrier weighing one ton, This particular Geneva
was about 18 inches in diameter
Disadvantages of Genevas
‘The Geneva is not @ versatile mechanism. It ean
be used to produce no less than three, and usually
no more than 18 dwells per revolution of the output
shait. Furthermore, onee the number of dwells has
been selected, the designer is well locked into 2 given
set of motion curves. ‘The ratio of dwell period to
motion period is also established once the number
of dwells por revolution has been selected. Also, all
Geneva acceleration eurves start and end with finite
acceleration and deceleration. ‘This means they pro-
duee jerk.
Ty
‘There are three types of Genevas: (1) external,
which is the most popular, and which is represented
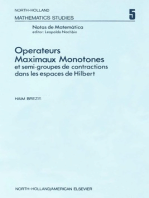
by the doviee shown in Fig. 9-1; (2) internal, which
is also very common and is illustrated by Fig. 9
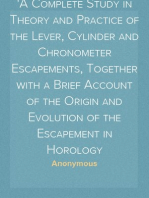
and (3) spherieal, Fig. 9-3, whieh is extremely rar
We will take 2 eloser look at some external and
internal Genevas later on, but will not spend more
time on the spherical type.
Genevas are also combined with a wide variety of
other mechanisms, such us four-bar linkages; cluteh
brake combinations; noneircular gears; cte., to modify
the motion curves and dwell-motion ratios obtained
from a pure Geneva. We will sec several different
examples of these later.
s of Gonevas
128 GENEVA
ring
slot
center
line
drive pin
drive slot
lock
ae
Prveing eet of MACHINE DESION Mapai; De #1208,
Fig, 0-1, Four-slot external Genova,
Motion Curves
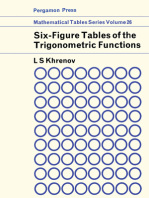
‘The motion curves for several external Genevas
are shown in Fig. 9-4; and for internal Genevas, in
Fig. 9-3. As can be scen, the two curve sets differ
quite drastieally in shape. Figure 9-6 shows the
motion curves for four-slot internal and external
Genevas superimposed for comparison.
output
ee input
jj drive pin
Drawing cowtiny of MACHINE DESIGN Magnan Dt 88,136
“ ieee
Fig. 9-2. Fourlot internal Geneva,
(MECHANISMS, ch
A few general comments can be made about these
motion curves,
1, For an external Geneva, the dwell period
always exceeds the motion period.
For an external Geneva, the dwell period
‘always lasts longer than the time required
for 180 degrees of motion of the input driver.
For an internal Geneva, the motion period
always exceeds the dwell period.
For an internal Geneva, the dwell period is
always shorter than the time required for
180 degrees of input.
2,
-
NN
oupal |
YU
Drawine cnrey of MACHINE DESIGN Magasin; De. 8, 1286
of MACHINE DESIG: Dec 58 128%
Fig. 9-3. Four-lot spherieal Geneva,
5. For a spherical geneva, the dwell period
equals the motion period, and equals the
time required for exactly 180 degrees of input.
. The magnitude of peak acceleration and de-
cecleration, velocity, ete., obtained with #
Geneva, is « funetion of the number of slots
or dwells. This is true of all types.
As the ratio between the diameter of the wheel and
the diameter of the driver gots larger (more slots oF
dwell periods per revolution of the output), mai
mum accelerations and velocitics decrease (for #
given driver speed). This makes sense because the
indexing angle of the output decreases as the numbeT
of slots increases.
che GENEVA MECHANISMS. 129
a
TE
| ee Bl
| paste aE bs)
| ee Be
4 El st
4 t Be
Bel
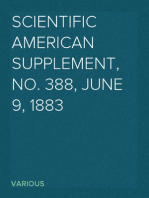
Fig. 9-4. Motion curves for external Genevas with four, ex, and ten slots,
excclentian
eelocty
duplacenene
Fig. 0-5, Motion curves for internal Genevas with four, six, und ten slots,
couternal
interna
displacement
Internal)
time Time
Fig. 9-6. Comparison of the motion curves of internal and external Genevas with four slots,
130 GENEVA MECHANISMS ch
direction of motion
= of pin
Fig. 9-7. The drive pin of the Geneva should enter the
slois in the deiven wheel along an are that i tangent to the
‘centerline of the slot, rather than along & line which deviates
from the slot centerline by some angle 3, ax shown here.
Miscellaneous Comment
Ina well-designed Geneva the drive pin will enter
the slots of the output wheel along an are that is
tangent to the eenterline of the slot, as shown in
Fig. 9-1. If the direction of motion of the pin
dovintes from the slot centerline by an angle A,
shown in Fig. 9-7, impact can result. This wil either
be a positive or negative impact (that is, it will
produce cither a positive or # negative torque on
the driver} depending upon whether the slot is at
some angle above the tangent line of the pin's
motion or at some angle below it, (Figure 9-7 shows
situation where the tangent line is below the pin's
motion line.)
Figure 9-8 shows the displacement curves that
result from three situations: the deviation (angle g)
is 5 degrees ar O degrees (tangent ). There dors not
seem to be much difference between these three
curves, each of which represents only the first few
degrees of motion of the output member rather than
the complete displacement curve, as per Fig. 9-4.
The velocity curves for these three situations, also
shown in Fig. 9-8, do not appear to have changed
much either,
If we now plot the acecleration curves, however,
we will find that we have introduced impaet when
the slot’s centerline was above or below the line
tangent {o the pin’s motion, This is beewuse the
angular velocity in cach ease starts at a finite positive
‘or negative value; and instantaneous change in ve~
locity: means an infinite acecteration which, in turn,
means impact. In practice, of course, a small
velocity would mean a relatively small impact (even
though theory says any instantaneous change means
aan infinite acceleration) and would eause no trouble
If the machine is operated at. high speeds, however,
or under heavy loads, or with elastic connections
between parts, even a small, sudden change in ve-
locity ean cause severe impact, stress, vibration, lost
motion, jamming, ete. Figure 9-9 shows the acceler-
ation eurves for the three situations.
As discussed in Chapter 5, a high-speed or heavily
loaded Geneva ean also get into difficulty if the pit
is not 8 good running fit in the slots in the output
Ez
S|
al
P| /2" slot 5 below
| tangent
time
slot 5° above
~ tangent
| stot tangent ff
2 Yo stor 5: below
e tangent
TL time
Fig. 9-8, Displacement and velocity eurves of an external
Geneva hen the direction af motion of the drive pin 18
‘tangent to the slot; when the lot is 9 degrees above the
tangent line; and when it ic 5 degrees below it (the latter
situation ie shown in Fig. 9-7).
cho
Wheel. Elasticity in the system may allow the pin to
chatter from one side of the slot to the other as it
Arives the wheel, producing a series of impacts which
can eause all sorts of trouble, (See Figs. 5-9 and
5-10 for the resultant motion curves.)
slot sr below /
rangent /
acielenation
ae
pe
/b—slor above
4 engent
Fig. 0-9, Acceleration curves for tangent and 6 degrees
‘misaligned Hots,
Four sketches of external Genevas with five, six,
cight, and ten slots, respretively, are shown in Fig.
910. Notiee how the ratio between the diameter
of the driver and the diameter of the wheel decreases
(Af :
\ os)
ate
GENEVA MECHANISMS, 131
Fig. 9-10. Fxternal Genevas with five, six, eight, and ten
slots, respectively,
as the number of slots increases. Notiee also, that
the indexing angle decreases.
‘Three internal Genevas with four, eight, and
twelve slots are illustrated in Fig. 9-11. Again, notice
how the ratio of driver diameter to output wheel
diameter decreases as the number of slots inereases.
Notice too, that the driver must be mounted on
cantilevered shaft in each case, whereas the external
Geneva of the previous illustration could have both
input and output members mounted on through
Fig. 9-11. Internal Geneyae with four, eight, and (welve slots,
GENEVA MECHANISMS 133
a9
Fig. 9-14. Fivestep Geneva mechanisim used in the indexing system of a large multiple-spindle machine tool,
134 GENEVA MECHANISMS ane
long locking
surface
Fig. 0-15, Siv-slot external Geneve used for light-duty
instrument applications
Fig. 9-16, Fourlot external Geneva with three-pin driver,
raving conti of PRODUCT ENGINEERING DESIGN MAN'TAL,
Fig. 9417, Four-slot Geneva driven by a two-pin driver,
Fig. 9-18, Chain-mounted drive pins with blocks for loek-
ing during dwells,
ane HTD
pe 4 ap eres
Xs Lean :
fr A
rowing ewren«/ PRODUCT ENGINEERING Sapna: Fone
Fig, 9-19, (Left) Beternal Geneva driven by a four-bar
linkage.
You might also like
- Differential Transformation Method for Mechanical Engineering ProblemsFrom EverandDifferential Transformation Method for Mechanical Engineering ProblemsNo ratings yet
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationFrom EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationNo ratings yet
- Experimental Thermodynamics: Experimental Thermodynamics of Non-Reacting FluidsFrom EverandExperimental Thermodynamics: Experimental Thermodynamics of Non-Reacting FluidsB. Le NeindreNo ratings yet
- Metals: Thermal and Mechanical DataFrom EverandMetals: Thermal and Mechanical DataSimonne AllardNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- Transition and Turbulence: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin–Madison, October 13–15, 1980From EverandTransition and Turbulence: Proceedings of a Symposium Conducted by the Mathematics Research Center, the University of Wisconsin–Madison, October 13–15, 1980No ratings yet
- Brown's Knots and Splices - With Tables of Strengths of Ropes, Etc. and Wire RiggingFrom EverandBrown's Knots and Splices - With Tables of Strengths of Ropes, Etc. and Wire RiggingRating: 5 out of 5 stars5/5 (1)
- Scientific American Supplement, No. 611, September 17, 1887From EverandScientific American Supplement, No. 611, September 17, 1887No ratings yet
- Clock Cleaning and Repairing - With a Chapter on Adding Quarter-Chimes to a Grandfather ClockFrom EverandClock Cleaning and Repairing - With a Chapter on Adding Quarter-Chimes to a Grandfather ClockRating: 5 out of 5 stars5/5 (1)
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- The Petrol Engine: A Text-book dealing with the Principles of Design and Construction, with a Special Chapter on the Two-stroke EngineFrom EverandThe Petrol Engine: A Text-book dealing with the Principles of Design and Construction, with a Special Chapter on the Two-stroke EngineNo ratings yet
- Ope¦rateurs maximaux monotones et semi-groupes de contractions dans les espaces de HilbertFrom EverandOpe¦rateurs maximaux monotones et semi-groupes de contractions dans les espaces de HilbertNo ratings yet
- Design of Piles Under Cyclic Loading: SOLCYP RecommendationsFrom EverandDesign of Piles Under Cyclic Loading: SOLCYP RecommendationsAlain PuechNo ratings yet
- Watch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyFrom EverandWatch and Clock Escapements A Complete Study in Theory and Practice of the Lever, Cylinder and Chronometer Escapements, Together with a Brief Account of the Origin and Evolution of the Escapement in HorologyNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Six-Figure Tables of Trigonometric Functions: Mathematical Tables SeriesFrom EverandSix-Figure Tables of Trigonometric Functions: Mathematical Tables SeriesRating: 5 out of 5 stars5/5 (1)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Practical Stair Building and Handrailing: By the square section and falling line systemFrom EverandPractical Stair Building and Handrailing: By the square section and falling line systemNo ratings yet
- 1800 Mechanical Movements, Devices and AppliancesFrom Everand1800 Mechanical Movements, Devices and AppliancesRating: 4 out of 5 stars4/5 (7)
- Forex Wave Theory: A Technical Analysis for Spot and Futures Curency Traders: A Technical Analysis for Spot and Futures Curency TradersFrom EverandForex Wave Theory: A Technical Analysis for Spot and Futures Curency Traders: A Technical Analysis for Spot and Futures Curency TradersNo ratings yet
- Theory of Silk Weaving: A Treatise on the Construction and Application of Weaves, and the Decomposition and Calculation of Broad and Narrow, Plain, Novelty and Jacquard Silk FabricsFrom EverandTheory of Silk Weaving: A Treatise on the Construction and Application of Weaves, and the Decomposition and Calculation of Broad and Narrow, Plain, Novelty and Jacquard Silk FabricsNo ratings yet
- Steam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversFrom EverandSteam Turbines A Book of Instruction for the Adjustment and Operation of the Principal Types of this Class of Prime MoversRating: 5 out of 5 stars5/5 (2)
- The Inner Workings of a Watch - A Simple Guide for Enthusiasts of Clockwork MechanismsFrom EverandThe Inner Workings of a Watch - A Simple Guide for Enthusiasts of Clockwork MechanismsNo ratings yet
- The Book of Basic Machines: The U.S. Navy Training ManualFrom EverandThe Book of Basic Machines: The U.S. Navy Training ManualRating: 4 out of 5 stars4/5 (4)
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)