You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Fifth Wheel Load CalculationDocument19 pagesFifth Wheel Load CalculationAnonymous 48jYxR1C50% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Certificate of Origin SampleDocument2 pagesCertificate of Origin SampleReymark Sanglay ColomaNo ratings yet
- Yogesh Solar CellsDocument23 pagesYogesh Solar Cellsashikhmd4467No ratings yet
- Design of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS AlgorithmDocument11 pagesDesign of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS Algorithmashikhmd4467No ratings yet
- CostCurves PDFDocument63 pagesCostCurves PDFashikhmd4467No ratings yet
- Cuckoo Search With Levy FlightDocument4 pagesCuckoo Search With Levy Flightashikhmd4467No ratings yet
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Document6 pages2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467No ratings yet
- Training Period: Department of Electrical and Electronic EngineeringDocument1 pageTraining Period: Department of Electrical and Electronic Engineeringashikhmd4467No ratings yet
- Synthesis of Neural Controller Applied To Flexible AC Transmission SystemsDocument13 pagesSynthesis of Neural Controller Applied To Flexible AC Transmission Systemsashikhmd4467No ratings yet
- Notice Ragarding Attendance of ITDocument1 pageNotice Ragarding Attendance of ITashikhmd4467No ratings yet
- Plecs SVMDocument5 pagesPlecs SVMashikhmd4467No ratings yet
- Linear QuasiDocument50 pagesLinear Quasiashikhmd4467No ratings yet
- Optimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution AlgorithmDocument8 pagesOptimal Design of Power System Stabilizer For Multi-Machine Power System Using Differential Evolution Algorithmashikhmd4467No ratings yet
- Mark Sheet (Theory) : Mscte 2013-2014 Summer 2 EEE 5201 High Voltage Engineering 3.00 300Document1 pageMark Sheet (Theory) : Mscte 2013-2014 Summer 2 EEE 5201 High Voltage Engineering 3.00 300ashikhmd4467No ratings yet
- Direct Energy Conversion: Bypassing RotatingDocument1 pageDirect Energy Conversion: Bypassing Rotatingashikhmd4467No ratings yet
- Small-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power GridDocument6 pagesSmall-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power Gridashikhmd4467No ratings yet
- Optimal Multiobjective Design of Power System Stabilizers Using Simulated AnnealingDocument12 pagesOptimal Multiobjective Design of Power System Stabilizers Using Simulated Annealingashikhmd4467No ratings yet
- Introduction To Batteries and Fuelcells ModuleDocument54 pagesIntroduction To Batteries and Fuelcells Moduleashikhmd4467No ratings yet
- As-Level Biology Cell Membranes and Transport Worksheet: Name: - Class: XI SCIENCEDocument5 pagesAs-Level Biology Cell Membranes and Transport Worksheet: Name: - Class: XI SCIENCEDina Anggraini Pramitasari100% (2)
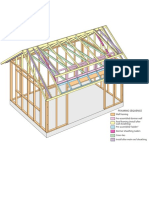
- Figure B Framing: Pre-Assembled Dormer Wall Roof Framing (Install After Wall Sheathing) Wall FramingDocument13 pagesFigure B Framing: Pre-Assembled Dormer Wall Roof Framing (Install After Wall Sheathing) Wall FramingMúsica viajera MXNo ratings yet
- Daimler India Commercial Vehicles PVTDocument2 pagesDaimler India Commercial Vehicles PVTsankarsuper83No ratings yet
- Navistar DT530Document3 pagesNavistar DT530montanoestefani03No ratings yet
- Philippine Airport Ground Support SolutionsDocument13 pagesPhilippine Airport Ground Support SolutionsNomanNo ratings yet
- Florentina Sadiku: English Speaker/translatorDocument1 pageFlorentina Sadiku: English Speaker/translatorFlorentina Tina SadikuNo ratings yet
- 2024 Santa Fe (Mx5a) OmDocument675 pages2024 Santa Fe (Mx5a) OmJose Luis Rodriguez AmarillaNo ratings yet
- AKSH-Slew Bearing Catalogue PDFDocument13 pagesAKSH-Slew Bearing Catalogue PDFManoj JajamNo ratings yet
- Lecture2 - Social Infrastructure PlanningDocument26 pagesLecture2 - Social Infrastructure PlanningArunava SarkarNo ratings yet
- ISKAR Catalogue PDFDocument32 pagesISKAR Catalogue PDFSACHINNo ratings yet
- Comprehensive Traffic & Transportation Plan For Bengaluru Chapter 8 - Transport IntegrationDocument7 pagesComprehensive Traffic & Transportation Plan For Bengaluru Chapter 8 - Transport IntegrationManu BkNo ratings yet
- ABSDocument17 pagesABSAniket MehareNo ratings yet
- q400 Aircraft Data Op-Psu-075 Rev 3-2Document42 pagesq400 Aircraft Data Op-Psu-075 Rev 3-2zacklawsNo ratings yet
- Uni Span Scaffolding Catalogue v0707151Document60 pagesUni Span Scaffolding Catalogue v0707151Luôn HồNo ratings yet
- Ravi RathodDocument9 pagesRavi RathodAmine ChahiNo ratings yet
- Britax Explora Isofix Ultra Car SeatDocument2 pagesBritax Explora Isofix Ultra Car SeatpttnpttnNo ratings yet
- Comparison Between Changi and NAIADocument16 pagesComparison Between Changi and NAIAMelijruth ValentinoNo ratings yet
- Packing List PDFDocument1 pagePacking List PDFKatherine SalamancaNo ratings yet
- Balmer Lawrie and Co LTDDocument8 pagesBalmer Lawrie and Co LTDaum sivaNo ratings yet
- Hung Vuong Bridge - Phu Yen, VietnamDocument1 pageHung Vuong Bridge - Phu Yen, VietnambriankimbjNo ratings yet
- Solutions: Defence & SecurityDocument32 pagesSolutions: Defence & SecurityNikola StarčevićNo ratings yet
- Goa Tour Packages - Read The Complete Itinerary To Know About Goa Tour Packages by Cox & KingsDocument5 pagesGoa Tour Packages - Read The Complete Itinerary To Know About Goa Tour Packages by Cox & Kingsmoisha sharmaNo ratings yet
- RA 7916 - The Special Economic Zone Act of 1995 (IRR)Document23 pagesRA 7916 - The Special Economic Zone Act of 1995 (IRR)Jen AnchetaNo ratings yet
- Anchor Loss in Heavy WeatherDocument4 pagesAnchor Loss in Heavy WeatherJivanJyotiRout100% (1)
- Oldsmobile Cutlass Owner's Manual PDFDocument336 pagesOldsmobile Cutlass Owner's Manual PDFEduRoiNo ratings yet
- Title: CI-V Interface For Icom M710 at 3.3vDocument1 pageTitle: CI-V Interface For Icom M710 at 3.3vDhiru Kholia100% (1)
- Bucyrus Erie 25b Parts Revised Book 139eDocument298 pagesBucyrus Erie 25b Parts Revised Book 139eعلیرضا محققیNo ratings yet
- Jinka - Mendir Design Build Road Project Draft Concept Design Report, March 2017Document20 pagesJinka - Mendir Design Build Road Project Draft Concept Design Report, March 2017Tewodros TadesseNo ratings yet