You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Smartphone Camera Advances Made Possible by Mems Cam Technologies February 20131Document14 pagesSmartphone Camera Advances Made Possible by Mems Cam Technologies February 20131Vitor PamplonaNo ratings yet
- Student Example - Career Action Plan AssignmentDocument5 pagesStudent Example - Career Action Plan AssignmentYash SNo ratings yet
- Formulating A Research ProblemDocument12 pagesFormulating A Research ProblemAesha Upadhyay100% (2)
- Ms 6 Science SyllabusDocument4 pagesMs 6 Science Syllabusapi-322611900No ratings yet
- Ross-Jones POD ILP Template - OverviewDocument204 pagesRoss-Jones POD ILP Template - OverviewEli MuchaiNo ratings yet
- Web Inspection For Reaching New Heights - BST International GMBHDocument4 pagesWeb Inspection For Reaching New Heights - BST International GMBHQuý Đình Mai MaiNo ratings yet
- Control Yaskawa Servo Drive Using TRIO Motion Controller: Thesis ProposalDocument11 pagesControl Yaskawa Servo Drive Using TRIO Motion Controller: Thesis ProposalNeel GandhiNo ratings yet
- SPE 149078 Essence of The SPE Petroleum Resources Management System Definitions and GuidingDocument2 pagesSPE 149078 Essence of The SPE Petroleum Resources Management System Definitions and GuidingBrajhann TámaraNo ratings yet
- Reality in The Name of God - Chapter 2 - The Kabbalah of Being - Horwitz NoahDocument55 pagesReality in The Name of God - Chapter 2 - The Kabbalah of Being - Horwitz NoahVladimir EstragonNo ratings yet
- New ICD-10-CM Codes For BlindnessDocument6 pagesNew ICD-10-CM Codes For BlindnessdrrskhanNo ratings yet
- Soalan BiologiDocument9 pagesSoalan BiologiKeluarga IzzatNo ratings yet
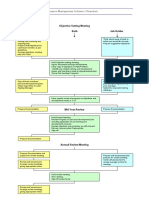
- PMS FlowchartDocument1 pagePMS FlowchartPrabhuraaj98No ratings yet
- C++ ManualDocument36 pagesC++ ManualNancyNo ratings yet
- Substitution CiphersDocument38 pagesSubstitution CiphersPooja ThakkarNo ratings yet
- The Franck-Hertz Experiment Phy 344: E = hν originally proposed for theDocument4 pagesThe Franck-Hertz Experiment Phy 344: E = hν originally proposed for thebayman66No ratings yet
- Resume 09Document2 pagesResume 09mmaft74No ratings yet
- English4 - q4 - Week - 1 - v4 (1) 12wqDocument9 pagesEnglish4 - q4 - Week - 1 - v4 (1) 12wqDivina Pedrozo MalinaoNo ratings yet
- Exploring Random VariablesDocument22 pagesExploring Random VariablesJaneth MarcelinoNo ratings yet
- Teaching Social Studies in Elementary Grades GroupingsDocument10 pagesTeaching Social Studies in Elementary Grades GroupingsBabate AxielvieNo ratings yet
- Accountability Part 2: Lecturer: Dr. Ann Downer, EddDocument1 pageAccountability Part 2: Lecturer: Dr. Ann Downer, EddMark Anthony EllanaNo ratings yet
- Implementing Rules and Regulations of R.A. 9184: Rule Vi and Rule ViiDocument15 pagesImplementing Rules and Regulations of R.A. 9184: Rule Vi and Rule ViiMark Joseph Verzosa FloresNo ratings yet
- SDOF - Free VibrationDocument12 pagesSDOF - Free VibrationPaul Bryan GuanNo ratings yet
- Micro MomentsDocument9 pagesMicro MomentsHasnain AbbasNo ratings yet
- đề anh số 13Document19 pagesđề anh số 13an nhaNo ratings yet
- Welcome!: Please Scroll Down To Read Introductory InformationDocument12 pagesWelcome!: Please Scroll Down To Read Introductory InformationbahbaguruNo ratings yet
- Molecular Mechanism of High Pressure Action On LupanineDocument6 pagesMolecular Mechanism of High Pressure Action On Lupanineruty_9_3No ratings yet
- Knjizica Za Cargo DVD Jednostrana PDFDocument12 pagesKnjizica Za Cargo DVD Jednostrana PDFkorone91No ratings yet
- Advantx RF Schematics 19095Document277 pagesAdvantx RF Schematics 19095JUAN CARLOSNo ratings yet
- Original Biography of Richard TrevithickDocument3 pagesOriginal Biography of Richard TrevithickracbabyNo ratings yet
- Pba 5 Polyurethane Bonded Revetments Design Manual WWW Arcadis NL IMPORTANTDocument102 pagesPba 5 Polyurethane Bonded Revetments Design Manual WWW Arcadis NL IMPORTANTvoch007No ratings yet