You might also like
- Make A 3D Printer With A CNC Router PDFDocument55 pagesMake A 3D Printer With A CNC Router PDFMarius Danila100% (1)
- OP 1 ReferenceDocument37 pagesOP 1 ReferenceChadwick Perry100% (2)
- E36 PDC InstallDocument17 pagesE36 PDC Installbernardfong100% (2)
- Why Micropython: Marco Zennaro, PHD IctpDocument35 pagesWhy Micropython: Marco Zennaro, PHD IctpCharme YEBADOKPONo ratings yet
- Moriseiki Maintenance ClassDocument410 pagesMoriseiki Maintenance ClassLEONEL CARDENAS100% (10)
- Doosan Puma MX Series PDFDocument68 pagesDoosan Puma MX Series PDFGuillermo RamirezNo ratings yet
- MazakDocument74 pagesMazakphuongdx100% (1)
- Ball Screw Maintenance PDFDocument15 pagesBall Screw Maintenance PDFSergio Trujillo CerroNo ratings yet
- Quick Knurling CatalogueDocument28 pagesQuick Knurling CatalogueMilos Lazovic100% (1)
- Mazak Programming Manual For Mazatrol Matrix 3DDocument80 pagesMazak Programming Manual For Mazatrol Matrix 3DArturo LopezNo ratings yet
- CNC Machine Tools and Control SystemsDocument39 pagesCNC Machine Tools and Control Systemsp_a_jeevaNo ratings yet
- Poly Works Beginners GuideDocument121 pagesPoly Works Beginners GuideMałgorzata Butkiewicz100% (1)
- NC Guide ProDocument4 pagesNC Guide ProBhupesh Kumar100% (2)
- Applications Training For Integrex-100 400MkIII Series Mazatrol FusionDocument122 pagesApplications Training For Integrex-100 400MkIII Series Mazatrol Fusiontsaladyga100% (6)
- Turning Programming (PC Based) PDFDocument56 pagesTurning Programming (PC Based) PDFSRAVANNo ratings yet
- CNC LectureDocument16 pagesCNC LectureJyoti Patole JadhavNo ratings yet
- MANUAL Heidenhain 620 enDocument44 pagesMANUAL Heidenhain 620 enlucscurtuNo ratings yet
- Heidenhain Touch ProbeDocument72 pagesHeidenhain Touch ProbeHoho Hahov100% (1)
- Mazatrol Basic EIA, IsO G Code Programming Class For Mazak Machining Centers OutlineDocument3 pagesMazatrol Basic EIA, IsO G Code Programming Class For Mazak Machining Centers OutlineAlberto SabasNo ratings yet
- MAZAK MatrixMillTurn EIA ProgManualDocument618 pagesMAZAK MatrixMillTurn EIA ProgManuallastowlNo ratings yet
- Driven Tool Holders - MazakDocument54 pagesDriven Tool Holders - MazakLuvuyo ZithoNo ratings yet
- MAZAK Matrix2 EIA ProgManualDocument502 pagesMAZAK Matrix2 EIA ProgManuallastowl50% (2)
- Okuma OSP 5 Axis TrainingDocument49 pagesOkuma OSP 5 Axis TrainingRick WilliamsNo ratings yet
- Field Service Hurco1990 1999Document491 pagesField Service Hurco1990 1999Reparatii Cnc100% (3)
- Manual Guide IDocument770 pagesManual Guide Ibenabedm67% (3)
- Ma Zak Progressive Learning Catalog 2010Document58 pagesMa Zak Progressive Learning Catalog 2010jecorralesjen2No ratings yet
- BA DuraMax REV 3 0 Online en PDFDocument235 pagesBA DuraMax REV 3 0 Online en PDFbeto206123100% (1)
- Linear Scales (Encodes) : 1.1. HH: Microcontrol: Cross-Reference ComparisonDocument4 pagesLinear Scales (Encodes) : 1.1. HH: Microcontrol: Cross-Reference Comparisonognen88No ratings yet
- G54.4 Workpiece Setup Error CorrectionDocument10 pagesG54.4 Workpiece Setup Error Correctionhung0% (1)
- Lathe Programming Workbook HAASDocument153 pagesLathe Programming Workbook HAASguimaslipa100% (1)
- CNC Basic & Prog.Document89 pagesCNC Basic & Prog.Christine BrownNo ratings yet
- Руководство пользователя V600Document119 pagesРуководство пользователя V600Marković AlexandarNo ratings yet
- vmc8501020 NCDocument153 pagesvmc8501020 NCNarendra Yadav100% (2)
- Fanuc 5 AxisDocument192 pagesFanuc 5 AxisKiên Trung NguyễnNo ratings yet
- Fanuc Manual GuideDocument172 pagesFanuc Manual GuidemarianhainarosieNo ratings yet
- Q&A Manual Guide 16i 18i 21iDocument23 pagesQ&A Manual Guide 16i 18i 21ivrpatel1No ratings yet
- Programming Manual Fusion 640TX EIA, IsODocument366 pagesProgramming Manual Fusion 640TX EIA, IsOMatthew GutierrezNo ratings yet
- Instruction Manual TT1800SY PDFDocument244 pagesInstruction Manual TT1800SY PDFGriffin Armament SuppressorsNo ratings yet
- Echosounder v3Document20 pagesEchosounder v3Anoop Sree100% (1)
- Haas TM ManualDocument66 pagesHaas TM ManualSilvia_282008roNo ratings yet
- ProgManual - DXF (EZ Trak Programming and Operating Manual-March 2001)Document289 pagesProgManual - DXF (EZ Trak Programming and Operating Manual-March 2001)Mike Ham100% (1)
- Performance Test Strategy v071611Document10 pagesPerformance Test Strategy v071611Sravan Kumar Adeti100% (1)
- Doosan Infracore EZ Guide-I Programming For Lathe.Document108 pagesDoosan Infracore EZ Guide-I Programming For Lathe.JohnPaulSmith1100% (1)
- FH6000 Electrical Diagrams PDFDocument367 pagesFH6000 Electrical Diagrams PDFAbdul Leon100% (1)
- 70-740: Installation, Storage, and Compute With Windows Server 2016Document113 pages70-740: Installation, Storage, and Compute With Windows Server 2016Roberto Tébar EspuigNo ratings yet
- Macro " B " Programming: Makino Asia Pte LTD Application DepartmentDocument71 pagesMacro " B " Programming: Makino Asia Pte LTD Application DepartmentS.Dharanipathy85% (13)
- Accuracy Test of Five-Axis CNC Machine Tool With 3D Probe-Ball PartIIDocument8 pagesAccuracy Test of Five-Axis CNC Machine Tool With 3D Probe-Ball PartIIwang guanming100% (1)
- Makino STL Cam PDFDocument98 pagesMakino STL Cam PDFberri23No ratings yet
- Heidenhain iTNC 530 Touch ProbeDocument169 pagesHeidenhain iTNC 530 Touch Probemarian_mitran_1No ratings yet
- V55 Maintenance 5Document5 pagesV55 Maintenance 5วรพงษ์ กอชัชวาลNo ratings yet
- CNC NotesDocument21 pagesCNC NotesradhiostrokesNo ratings yet
- Renishaw.-Installation Manual For Machine ToolsDocument220 pagesRenishaw.-Installation Manual For Machine ToolsPeter Nomikos100% (1)
- Accuracy Inspection Equipment CNCDocument36 pagesAccuracy Inspection Equipment CNCjimmy_bikerNo ratings yet
- Ponz Controller Fanuc Oi PF ManualDocument89 pagesPonz Controller Fanuc Oi PF ManualRose Ann C. RofuliNo ratings yet
- NC-Part Programming: CNC Turning Canned CyclesDocument33 pagesNC-Part Programming: CNC Turning Canned Cyclessumanth50% (2)
- Iso230 2 2006Document6 pagesIso230 2 2006Amit Kumar100% (1)
- Fanuc CNC Lathe ProgrammingDocument3 pagesFanuc CNC Lathe Programmingnaborcuellar100% (1)
- DIN ISO Programming USer Manual 2010Document618 pagesDIN ISO Programming USer Manual 2010Reymondo BundocNo ratings yet
- VMC & HMC PDFDocument103 pagesVMC & HMC PDFNARENDER SINGHNo ratings yet
- International Progress in Precision Engineering: Proceedings of the 7th International Precision Engineering Seminar, Kobe, Japan, May 1993From EverandInternational Progress in Precision Engineering: Proceedings of the 7th International Precision Engineering Seminar, Kobe, Japan, May 1993No ratings yet
- Complete CIM by Manish SirDocument82 pagesComplete CIM by Manish Sirvibhutinathjha8No ratings yet
- Uncertainty Analysis of Positional Deviations of CNC Machine ToolsDocument8 pagesUncertainty Analysis of Positional Deviations of CNC Machine ToolsAgustin Brau AvilaNo ratings yet
- Non-Traditional Machining and Automation: B.Tech. (4 Sem) Spring 2021 Department of Mechanical Engineering NIT SrinagarDocument15 pagesNon-Traditional Machining and Automation: B.Tech. (4 Sem) Spring 2021 Department of Mechanical Engineering NIT SrinagarJatin prasad TandanNo ratings yet
- Soft Servo Glossary: For Servoworks CNC Products and SMP Series General Motion Control ProductsDocument32 pagesSoft Servo Glossary: For Servoworks CNC Products and SMP Series General Motion Control Productsعبد الكريم ملوحNo ratings yet
- Machine Tool ControlDocument51 pagesMachine Tool ControlDani AbHalimNo ratings yet
- IPC Global: Firmware Version 2.04Document16 pagesIPC Global: Firmware Version 2.04Deyen OcuNo ratings yet
- Ds - Tb82-En - G Manual Abb ConductividadDocument12 pagesDs - Tb82-En - G Manual Abb ConductividadJacob Molina MolinaNo ratings yet
- CV of Mir Sadat Ali-NhanceDocument3 pagesCV of Mir Sadat Ali-NhanceMukarramuddinNo ratings yet
- Structure Sensor Vs ZED CameraDocument2 pagesStructure Sensor Vs ZED CameraRahul KaruvingalNo ratings yet
- TIGT I2 ManualDocument68 pagesTIGT I2 ManualPauloNegreirosNo ratings yet
- TOPCNC TC55V Instruction ManualDocument13 pagesTOPCNC TC55V Instruction Manualanhthong3kNo ratings yet
- Av20185dn A&E SpecsDocument5 pagesAv20185dn A&E SpecsSayed HashemNo ratings yet
- Industry Profile: SelisDocument2 pagesIndustry Profile: SelisMilling and Grain magazineNo ratings yet
- Manual de Mantenimiento 1.0Document40 pagesManual de Mantenimiento 1.0Edwin CamachoNo ratings yet
- NuTiny-MS51FB Schematic V1.1Document2 pagesNuTiny-MS51FB Schematic V1.1varunyowabackupNo ratings yet
- Nuts Bolt 98Document130 pagesNuts Bolt 98Panagiotis FournarakisNo ratings yet
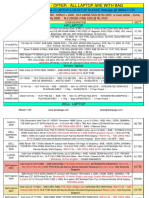
- Delta - Offer - All Laptop Are With BagDocument16 pagesDelta - Offer - All Laptop Are With BagSantosh LakkavatriNo ratings yet
- Screenshot 2024-04-05 at 6.53.36 PMDocument3 pagesScreenshot 2024-04-05 at 6.53.36 PM杰森林No ratings yet
- 9f09a Compal LA-B102P r1.0 2014Document47 pages9f09a Compal LA-B102P r1.0 2014Kevin DumbravaNo ratings yet
- Cisco 2600 Router Command ReferenceDocument196 pagesCisco 2600 Router Command ReferencejoeroNo ratings yet
- Hangar9 Cap 232 ManualDocument44 pagesHangar9 Cap 232 ManualAlessandro QueirogaNo ratings yet
- PT IKT Profile 18Document37 pagesPT IKT Profile 18Dody Fasola100% (1)
- Tea 5764Document68 pagesTea 5764Ariana Ribeiro LameirinhasNo ratings yet
- Lib 12F629Document18 pagesLib 12F629Sixto AgueroNo ratings yet
- CBLM - 1 - Planning - 2 - L (Session Plan)Document5 pagesCBLM - 1 - Planning - 2 - L (Session Plan)Oliver CalledoNo ratings yet
- Manual EG2003 360 Gettingstarted PDFDocument127 pagesManual EG2003 360 Gettingstarted PDFJOYCENo ratings yet
- Assignment No 3 Course Code: CAP254 SYSTEMDocument11 pagesAssignment No 3 Course Code: CAP254 SYSTEMSurendra Singh ChauhanNo ratings yet